
技术摘要:
本申请提供了一种车辆与车道线的距离确定方法、装置、设备及存储介质,属于车辆电子技术领域。该方法包括:电子设备获取目标图像,目标图像为包括当前车辆周围的目标车道线的图像;确定目标车道线在目标图像中的第一坐标信息;根据第一坐标信息,将第一坐标信息映射为 全部
背景技术:
随着车辆电子技术的发展,车辆的精确定位技术和车辆的精确导航技术越来越受 到人们的青睐。其中,精确测量车辆的车身与车道线之间的距离在精确定位技术和精确导 航技术中的起到非常关键的作用。 相关技术中,电子设备通过车辆上的摄像头拍摄车道线;根据摄像头的焦距f、拍 摄图像内的车道线的宽度a以及车道线实际的宽度b,确定车辆的车身与车道线之间的目标 距离D。其中,摄像头的焦距f与目标距离D的比值等于拍摄图像内的车道线的宽度a与车道 线实际的宽度b的比值;即f/D=a/b,D=f*b/a。 但是,电子设备内摄像头的焦距f和车道线实际的宽度b都是根据经验输入的预设 值;在实际测量过程中,由于摄像头的真实焦距和车道线的真实宽度与存储的预设值并非 一致,从而导致该方法确定的目标距离的精确度不高,不能达到车辆的精确定位技术和车 辆的精确导航技术的要求。
技术实现要素:
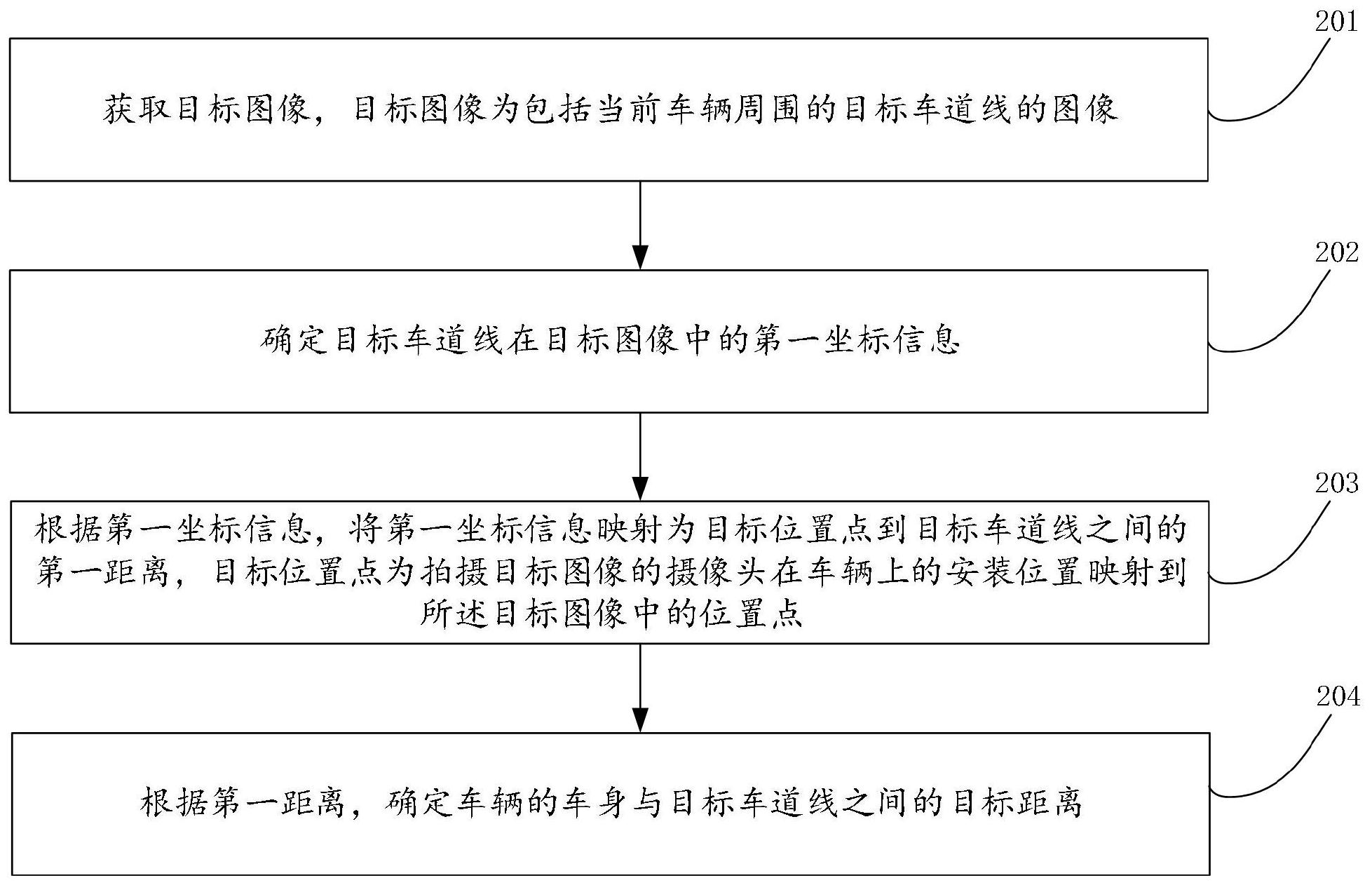
本申请实施例提供了一种车辆与车道线的距离确定方法、装置、设备及存储介质, 能够提高确定车辆与车道线的距离的精确度。所述技术方案如下: 根据本申请实施例的一方面,提供了一种车辆与车道线的距离确定方法,所述方 法包括: 获取目标图像,所述目标图像为包括当前车辆周围的目标车道线的图像; 确定所述目标车道线在所述目标图像中的第一坐标信息; 根据所述第一坐标信息,将所述第一坐标信息映射为目标位置点到所述目标车道 线之间的第一距离,所述目标位置点为拍摄所述目标图像的摄像头在所述车辆上的安装位 置映射到所述目标图像中的位置点; 根据所述第一距离,确定所述车辆的车身与所述目标车道线之间的目标距离。 在本申请实施例中,由于电子设备获取目标图像中目标车道线的第一坐标信息, 通过将第一坐标信息映射为第一距离,根据第一距离确定车身与目标车道线之间的目标距 离;所以,电子设备在确定车辆与目标车道线的距离过程中,目标距离不受摄像头光学参数 的影响,提高了距离确定的精确性。 在一种可能的实现方式中,所述根据所述第一坐标信息,将所述第一坐标信息映 射为目标位置点到所述目标车道线之间的第一距离,包括: 从所述第一坐标信息中确定纵坐标值,根据所述纵坐标值,从纵坐标值和距离的 对应关系中获取所述纵坐标值对应的第二距离; 5 CN 111595253 A 说 明 书 2/25 页 根据所述第二距离,确定所述第一距离。 在本申请实施例中,可以根据第一坐标信息中的纵坐标值,确定第二距离,再根据 第二距离,确定第一距离,从而操作比较简单,效率比较高。 在另一种可能的实现方式中,所述根据所述第二距离,确定所述第一距离,包括: 响应于所述目标车道线与所述目标图像中的横坐标轴平行,将所述第二距离确定 为所述第一距离;或者, 响应于所述目标车道线与所述目标图像中的横坐标轴不平行,获取所述目标车道 线与所述横坐标轴之间的夹角;根据所述夹角与所述第二距离,确定所述第一距离。 在本申请实施例中,在根据第二距离确定第一距离时,可以根据目标车道线与目 标图像中的横坐标是否平行,通过两种方法确定第一距离,从而提高了距离确定的精确性。 在另一种可能的实现方式中,所述根据所述第一距离,确定所述车辆的车身与所 述目标车道线之间的目标距离,包括: 根据所述目标位置点,确定所述目标位置点到所述车辆的车身之间的第三距离; 根据所述第一距离和所述第三距离,确定所述车身与所述目标车道线之间的目标 距离。 在本申请实施例中,获取第三图像中停车线的第一坐标信息,通过第一坐标信息 与距离之间的映射关系,确定车辆的车头与停车线之间的第三目标距离。在确定车辆与目 标车道线的距离的过程中,第三目标距离不会受到摄像头光学参数的影响,提高了距离确 定的精确性。 在另一种可能的实现方式中,所述目标图像包括第一图像和第二图像,所述目标 位置点包括第一位置点和第二位置点,所述第一图像为安装在所述第一位置点的第一摄像 头拍摄的,所述第二图像为安装在所述第二位置点的第二摄像头拍摄的; 所述目标车道线包括第一车道线和第二车道线,所述第一车道线位于所述车辆的 左侧,所述第二车道线位于所述车辆的右侧;所述目标距离包括第一目标距离和第二目标 距离,所述第一目标距离为所述车身的左侧与所述第一车道线之间的距离,所述第二目标 距离为所述车身的右侧与所述第二车道线之间的距离。 在本申请实施例中,可以通过第一目标距离和第二目标距离,生成导航信息,从而 提高了车辆的智能性。 在另一种可能的实现方式中,所述根据所述第一距离,确定所述车辆的车身与所 述目标车道线之间的目标距离之后,所述方法还包括: 确定所述第一目标距离与所述第二目标距离之间的差值; 响应于所述差值不在预设范围内,输出第一提示信号,所述第一提示信号用于提 示所述车辆已偏离车道中心线,所述车道中心线为所述第一车道线与所述第二车道线之间 的中心线。 在本申请实施例中,当车辆偏离车道中心线时,输出第一提示信号,提示车辆已偏 离车道中心线,从而提高了车辆的智能性。 在另一种可能的实现方式中,所述目标图像包括第三图像,所述目标位置点包括 第三位置点,所述第三图像为安装在所述第三位置点的第三摄像头拍摄的,所述目标车道 线包括第三车道线,所述第三车道线位于所述车辆的前方;所述目标距离包括第三目标距 6 CN 111595253 A 说 明 书 3/25 页 离,所述第三目标距离为所述车辆的车头与所述第三车道线之间的距离;或者, 所述目标图像包括第四图像,所述目标位置点包括第四位置点,所述第四图像为 安装在所述第四位置点的第四摄像头拍摄的,所述目标车道线包括第四车道线,所述第四 车道线位于所述车辆的后方;所述目标距离包括第四目标距离,所述第四目标距离为所述 车辆的车尾与所述第四车道线之间的距离。 在本申请实施例中,获取第三图像中停车线的第一坐标信息,通过第一坐标信息 与距离之间的映射关系,确定车辆的车头与停车线之间的第三目标距离。在确定车辆与停 车线的距离的过程中,第三目标距离不会受到摄像头光学参数的影响;并且,在确定车辆与 停车线的距离的过程中,第四目标距离也不会受到摄像头光学参数的影响,因此提高了距 离确定的精确性。 在另一种可能的实现方式中,所述目标车道线为目标车库的停车位边缘线; 所述根据所述第一距离,确定所述车辆的车身与所述目标车道线之间的目标距离 之后,所述方法还包括: 响应于所述目标距离小于预设距离,输出第二提示信号,所述第二提示信号用于 提示所述车辆已接近所述停车位边缘线。 在本申请实施例中,当车辆的车身与目标车道线距离小于预设距离时,输出第二 提示信号,提示车辆已接近停车位边缘线,从而提高了车辆的智能性。 在另一种可能的实现方式中,所述根据所述第一距离,确定所述车辆的车身与所 述目标车道线之间的目标距离之后,所述方法还包括: 定位出所述车辆在地图中的第二坐标信息; 根据所述第二坐标信息和所述目标距离,确定所述目标车道线在所述地图中的第 三坐标信息; 根据所述第三坐标信息,在所述地图中标注所述目标车道线的位置。 在本申请实施例中,根据第三坐标信息,在地图中标注目标车道线的位置,由于在 确定车辆与目标车道线的距离的过程中,第三坐标信息不会受到摄像头光学参数的影响, 从而提高了目标车道线的位置的精确度。 在另一种可能的实现方式中,所述根据所述第三坐标信息,在所述地图中标注所 述目标车道线的位置,包括: 获取目标车道线在地图中的原位置的第四坐标信息; 根据所述第三坐标信息和所述第四坐标信息,确定误差值; 响应于所述误差值大于预设数值,根据所述第三坐标信息,对所述第四坐标信息 进行纠正。 在本申请实施例中,根据第三坐标信息,对目标车道线在地图中的原位置进行纠 正,由于在确定车辆与目标车道线的距离的过程中,第三坐标信息不会受到摄像头光学参 数的影响,从而提高了地图的精确度。 在另一种可能的实现方式中,所述根据所述第三坐标信息,在所述地图中标注所 述目标车道线的位置,包括: 根据所述第三坐标信息,在所述地图中绘制所述目标车道线。 在本申请实施例中,根据第三坐标信息,在地图中绘制目标车道线,由于在确定车 7 CN 111595253 A 说 明 书 4/25 页 辆与目标车道线的距离的过程中,第三坐标信息不会受到摄像头光学参数的影响,从而提 高了绘制地图的精确度。 在另一种可能的实现方式中,所述确定所述目标车道线在所述目标图像中的第一 坐标信息,包括: 从所述目标图像中识别出所述目标车道线; 将所述目标车道线等效转换为所述目标车道线的中心点,获取所述目标车道线的 中心点的横坐标值和纵坐标值; 根据所述目标车道线的中心点的横坐标值和纵坐标值,确定所述目标车道线在所 述目标图像中的第一坐标信息。 在本申请实施例中,将目标车道线等效转换为目标车道线的中心点,通过中心点 的坐标确定目标车道线的位置,提高了距离确定的速度。 根据本申请实施例的另一方面,提供了一种车辆与车道线的距离确定装置,所述 装置包括: 获取模块,用于获取目标图像,所述目标图像为包括当前车辆周围的目标车道线 的图像; 第一确定模块,用于确定所述目标车道线在所述目标图像中的第一坐标信息; 映射模块,用于根据所述第一坐标信息,将所述第一坐标信息映射为目标位置点 到所述目标车道线之间的第一距离,所述目标位置点为拍摄所述目标图像的摄像头在所述 车辆上的安装位置映射到所述目标图像中的位置点; 第二确定模块,用于根据所述第一距离,确定所述车辆的车身与所述目标车道线 之间的目标距离。 在一种可能的实现方式中,所述映射模块,用于从所述第一坐标信息中确定纵坐 标值,根据所述纵坐标值,从纵坐标值和距离的对应关系中获取所述纵坐标值对应的第二 距离;根据所述第二距离,确定所述第一距离。 在另一种可能的实现方式中,所述映射模块,还用于响应于所述目标车道线与所 述目标图像中的横坐标轴平行,将所述第二距离确定为所述第一距离;或者,所述映射模 块,还用于响应于所述目标车道线与所述目标图像中的横坐标轴不平行,获取所述目标车 道线与所述横坐标轴之间的夹角;根据所述夹角与所述第二距离,确定所述第一距离。 在另一种可能的实现方式中,所述第二确定模块,还用于根据所述目标位置点,确 定所述目标位置点到所述车辆的车身之间的第三距离;根据所述第一距离和所述第三距 离,确定所述车身与所述目标车道线之间的目标距离。 在另一种可能的实现方式中,所述目标图像包括第一图像和第二图像,所述目标 位置点包括第一位置点和第二位置点,所述第一图像为安装在所述第一位置点的第一摄像 头拍摄的,所述第二图像为安装在所述第二位置点的第二摄像头拍摄的; 所述目标车道线包括第一车道线和第二车道线,所述第一车道线位于所述车辆的 左侧,所述第二车道线位于所述车辆的右侧;所述目标距离包括第一目标距离和第二目标 距离,所述第一目标距离为所述车身的左侧与所述第一车道线之间的距离,所述第二目标 距离为所述车身的右侧与所述第二车道线之间的距离。 在另一种可能的实现方式中,所述装置还包括: 8 CN 111595253 A 说 明 书 5/25 页 第三确定模块,用于确定所述第一目标距离与所述第二目标距离之间的差值; 第一输出模块,用于响应于所述差值不在预设范围内,输出第一提示信号,所述第 一提示信号用于提示所述车辆已偏离车道中心线,所述车道中心线为所述第一车道线与所 述第二车道线之间的中心线。 在另一种可能的实现方式中,所述目标图像包括第三图像,所述目标位置点包括 第三位置点,所述第三图像为安装在所述第三位置点的第三摄像头拍摄的,所述目标车道 线包括第三车道线,所述第三车道线位于所述车辆的前方;所述目标距离包括第三目标距 离,所述第三目标距离为所述车辆的车头与所述第三车道线之间的距离;或者, 所述目标图像包括第四图像,所述目标位置点包括第四位置点,所述第四图像为 安装在所述第四位置点的第四摄像头拍摄的,所述目标车道线包括第四车道线,所述第四 车道线位于所述车辆的后方;所述目标距离包括第四目标距离,所述第四目标距离为所述 车辆的车尾与所述第四车道线之间的距离。 在另一种可能的实现方式中,所述目标车道线为目标车库的停车位边缘线,所述 装置还包括: 第二输出模块,用于响应于所述目标距离小于预设距离,输出第二提示信号,所述 第二提示信号用于提示所述车辆已接近所述停车位边缘线。 在另一种可能的实现方式中,所述装置还包括: 定位模块,用于定位出所述车辆在地图中的第二坐标信息; 第四确定模块,用于根据所述第二坐标信息和所述目标距离,确定所述目标车道 线在所述地图中的第三坐标信息; 标注模块,用于根据所述第三坐标信息,在所述地图中标注所述目标车道线的位 置。 在另一种可能的实现方式中,所述标注模块,还用于获取目标车道线在地图中的 原位置的第四坐标信息;根据所述第三坐标信息和所述第四坐标信息,确定误差值;响应于 所述误差值大于预设数值,根据所述第三坐标信息,对所述第四坐标信息进行纠正。 在另一种可能的实现方式中,所述标注模块,还用于根据所述第三坐标信息,在所 述地图中绘制所述目标车道线。 在另一种可能的实现方式中,所述第一确定模块,还用于从所述目标图像中识别 出所述目标车道线;将所述目标车道线等效转换为所述目标车道线的中心点,获取所述目 标车道线的中心点的横坐标值和纵坐标值;根据所述目标车道线的中心点的横坐标值和纵 坐标值,确定所述目标车道线在所述目标图像中的第一坐标信息。 根据本申请实施例的另一方面,提供了一种无人驾驶设备,所述无人驾驶设备包 括:车身、处理器、存储器和摄像头,所述处理器和所述存储器设置在所述车身内,所述摄像 头设置在所述车身的顶部;所述存储器中存储有至少一条指令,所述至少一条指令由所述 处理器加载并执行以实现上述任一可能实现方式所述的车辆与车道线的距离确定方法中 的操作。 根据本申请实施例的另一方面,提供了一种计算机可读存储介质,所述计算机可 读存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并具有以实现如所述 车辆与车道线的距离确定方法中所执行的操作。 9 CN 111595253 A 说 明 书 6/25 页 根据本申请实施例的另一方面,提供了一种计算机程序产品,所述计算机程序产 品包括一个或多个计算机程序,所述计算机程序被处理器加载并执行以实现如所述车辆与 车道线的距离确定方法中所执行的操作。 在本申请实施例中,电子设备获取目标图像,目标图像为包括当前车辆周围的目 标车道线的图像;确定目标车道线在目标图像中的第一坐标信息;根据第一坐标信息,将第 一坐标信息映射为目标位置点到目标车道线之间的第一距离,目标位置点为拍摄目标图像 的摄像头在车辆上的安装位置映射到所述目标图像中的位置点;根据第一距离,确定车辆 的车身与目标车道线之间的目标距离。由于获取目标图像中目标车道线的第一坐标信息, 通过将第一坐标信息映射为第一距离,根据第一距离确定车身与目标车道线之间的目标距 离;所以,电子设备在确定车辆与目标车道线的距离过程中,目标距离不受摄像头光学参数 的影响,提高了距离确定的精确性。 附图说明 为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使 用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于 本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他 的附图。 图1是本申请实施例提供的一种实施环境的示意图; 图2是本申请实施例提供的一种车辆与车道线的距离确定方法的流程图; 图3是本申请实施例提供的另一种车辆与车道线的距离确定方法的流程图; 图4是本申请实施例提供的一种通过图像处理算法识别出目标车道线的示意图; 图5是本申请实施例提供的另一种车辆与车道线的距离确定方法的流程图; 图6是本申请实施例提供的另一种车辆与车道线的距离确定方法的流程图; 图7是本申请实施例提供的另一种车辆与车道线的距离确定方法的流程图; 图8是本申请实施例提供的一种车辆与车道线的距离确定装置的结构示意图; 图9是本申请实施例提供的另一种车辆与车道线的距离确定装置的结构示意图; 图10是本申请实施例提供的一种无人驾驶设备的结构示意图。











