
技术摘要:
本发明公开一种智能型床上减重运动机器人,包括:固定架组件,固定架组件安装于床的四周上;第一驱动组件,第一驱动组件活动安装于固定架组件上,第一驱动组件用于夹持患者的大腿部靠近患者的脚部的一端,且向患者的大腿部提供向上或斜向上朝向患者的头部的力;第二驱 全部
背景技术:
现有技术上,脑卒中后偏瘫患者的半身活动能力较差,完全需要治疗师对患者的 下肢进行辅助治疗,通过治疗师的治疗,费时费力,效率较低,成本较高。
技术实现要素:
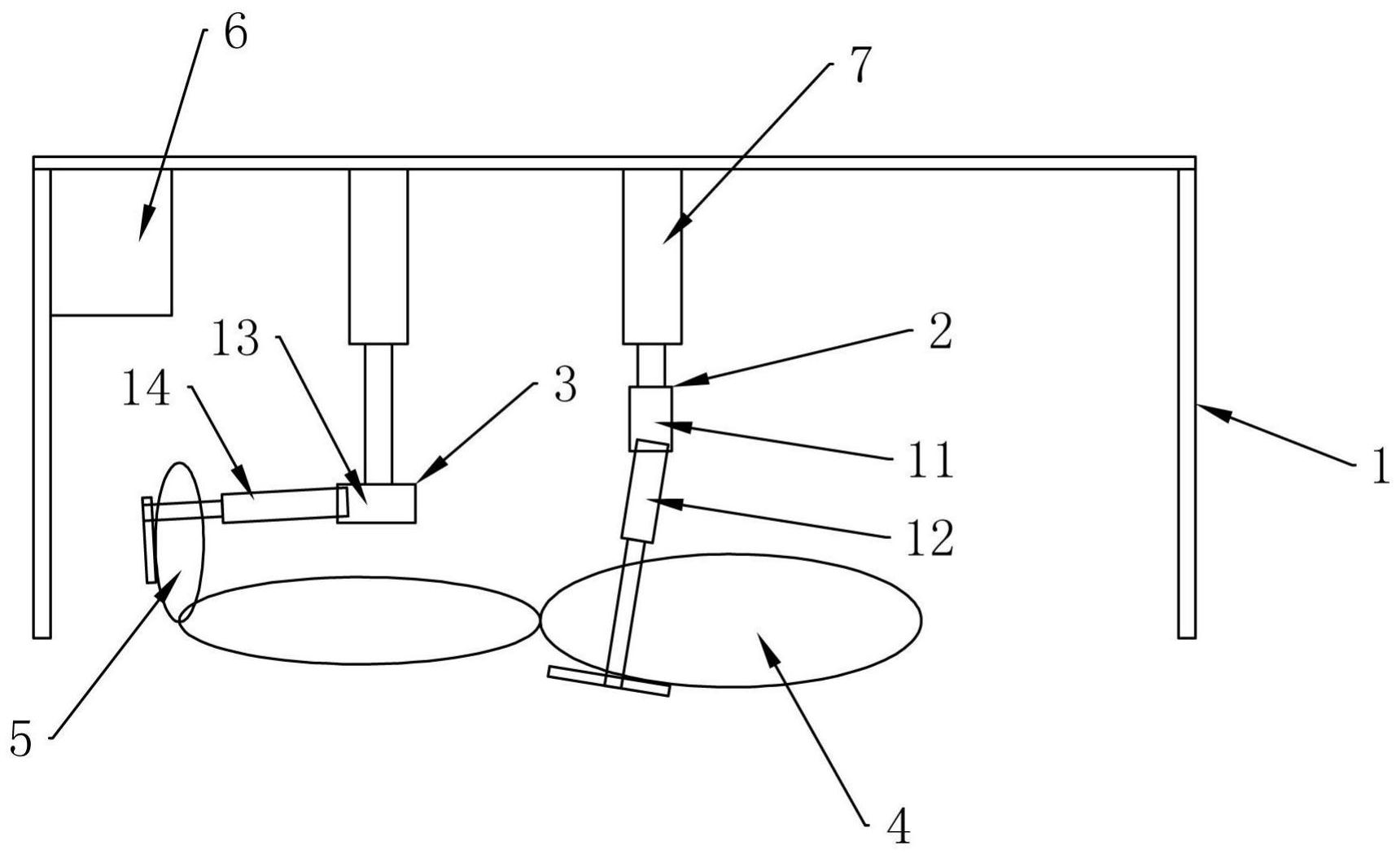
针对现有的偏瘫患者下肢都是通过治疗师进行辅助治疗的上述问题,现旨在提供 一种智能型床上减重运动机器人,能够对偏瘫患者进行自动化辅助治疗,省时省力,效率较 高。 具体技术方案如下: 一种智能型床上减重运动机器人,包括: 固定架组件,所述固定架组件安装于床的四周上; 第一驱动组件,所述第一驱动组件活动安装于所述固定架组件上,所述第一驱动 组件用于夹持患者的大腿部靠近所述患者的脚部的一端,且向所述患者的大腿部提供向上 或斜向上朝向所述患者的头部的力; 第二驱动组件,所述第二驱动组件活动安装于所述固定架组件上,所述第二驱动 组件用于夹持所述患者的脚部,且向所述患者的脚部提供水平方向或斜向上朝向所述患者 的头部的力; 控制器,所述控制器用于控制所述第一驱动组件对所述患者的大腿部提供的力的 方向和大小,以及控制所述第二驱动组件对所述患者的脚部提供的力的方向和大小。 上述的智能型床上减重运动机器人,其中,所述第一驱动组件包括:第一转动机构 和第一拉伸机构,所述第一拉伸机构通过所述第一转动机构与所述固定架组件转动连接, 所述控制器用于控制所述第一转动机构活动以驱使所述第一拉伸机构调节力的方向,以及 控制所述第一拉伸机构调节力的大小。 上述的智能型床上减重运动机器人,其中,所述第二驱动组件包括:第二转动机构 和第二拉伸机构,所述第二拉伸机构通过所述第二转动机构与所述固定架组件转动连接, 所述控制器用于控制所述第二转动机构活动以驱使所述第二拉伸机构调节力的方向,以及 控制所述第二拉伸机构调节力的大小。 上述的智能型床上减重运动机器人,其中,所述第一转动机构和所述第二转动机 构均包括: 第一壳座,所述第一壳座安装在所述固定架组件上; 电机,所述电机安装于所述第一壳座内; 第一齿轮,所述第一齿轮包括依次连接的第一伞形部和传动部,所述传动部与所 4 CN 111604919 A 说 明 书 2/5 页 述电机的驱动轴转动连接,所述第一伞形部与所述传动部同轴设置; 第二齿轮,所述第二齿轮包括依次连接的第二伞形部、固定部和第一齿部,所述第 二伞形部与所述第一伞形部啮合,所述第二伞形部、所述固定部和所述第一齿部同轴设置, 所述第一齿轮的中心轴线与所述第二齿轮的中心轴线垂直设置; 第三齿轮,所述第三齿轮包括依次连接的第二齿部和第三齿部,所述第二齿部与 所述第一齿部啮合,所述第二齿部与所述第三齿部同轴设置,所述第三齿轮的中心轴线与 所述第二齿轮的中心轴线平行设置; 第四齿轮,所述第四齿轮包括依次连接的第四齿部和第五齿部,所述第四齿部与 所述第五齿部同轴设置,所述第四齿部与所述第三齿部啮合,所述第四齿轮的中心轴线与 所述第三齿轮的中心轴线平行设置; 第五齿轮,所述第五齿轮包括依次连接的第六齿部和第七齿部,所述第六齿部与 所述第七齿部同轴设置,所述第六齿部与所述第五齿部啮合,所述第五齿轮与所述第三齿 轮同轴设置; 第六齿轮,所述第六齿轮与所述第七齿部啮合,所述第六齿轮与所述第四齿轮同 轴设置,所述第二齿轮、所述第三齿轮、所述第四齿轮、所述第五齿轮和所述第六齿轮分别 通过转轴与所述第一壳座转动连接; 第七齿轮,所述第七齿轮的外周设有传动齿,所述传动齿与所述第六齿轮啮合,所 述第七齿部的中心轴线与所述第六齿轮的中心轴线平行设置; 传动转轴,所述传动转轴通过键与所述第七齿轮连接,所述第一拉伸机构的一端 或所述第二拉伸机构的一端与所述传动转轴连接。 上述的智能型床上减重运动机器人,其中,所述第一拉伸机构和所述第二拉伸机 构均包括: 第二壳座,所述第二壳座与所述传动转轴连接; 第一气缸,所述第一气缸安装于所述第二壳座内; 夹持件,所述夹持件安装于所述第一气缸上。 上述的智能型床上减重运动机器人,其中,所述固定架组件上还设有两升降组件, 两所述升降组件分别与所述第一驱动组件、所述第二驱动组件传动连接,两所述升降组件 分别用于调节所述第一驱动组件、所述第二驱动组件的高度,所述控制器分别用于控制两 所述升降组件,分别带动所述第一驱动组件、所述第二驱动组件的升降。 上述的智能型床上减重运动机器人,其中,两所述升降组件均为第二气缸。 上述的智能型床上减重运动机器人,其中,所述固定架组件上还设有两摄像组件, 两所述摄像组件分别位于所述固定架组件的侧壁,每一所述摄像组件均包括: 支架,所述支架与所述固定架组件的侧壁固定连接; 摄像头,所述摄像头安装于所述支架上,所述摄像头朝向所述患者的脚部或所述 患者的大腿部,所述摄像头与所述控制器信号连接。 上述技术方案与现有技术相比具有的积极效果是: 本发明能够对偏瘫患者的大腿部和偏瘫患者的脚部进行提升并拉伸,实现对偏瘫 患者进行自动化辅助治疗,省时省力,效率较高。 5 CN 111604919 A 说 明 书 3/5 页 附图说明 图1为本发明一种智能型床上减重运动机器人的整体结构侧视图; 图2为本发明一种智能型床上减重运动机器人的整体结构正视图; 图3为本发明一种智能型床上减重运动机器人的第一转动机构或第二转动机构的 结构示意图; 图4为本发明一种智能型床上减重运动机器人的第六齿轮与第七齿轮的配合结构 示意图; 图5为本发明一种智能型床上减重运动机器人的第一拉伸机构或第二拉伸机构的 结构示意图; 附图中:1、固定架组件;2、第一驱动组件;3、第二驱动组件;4、大腿部;5、脚部;6、 控制器;7、升降组件;8、摄像组件;11、第一转动机构;12、第一拉伸机构;13、第二转动机构; 14、第二拉伸机构;15、第一壳座;16、电机;17、第一齿轮;18、第二齿轮;19、第三齿轮;20、第 四齿轮;21、第五齿轮;22、第六齿轮;23、第七齿轮;24、传动转轴;25、第一伞形部;26、传动 部;27、第二伞形部;28、固定部;29、第一齿部;30、第二齿部;31、第三齿部;32、第四齿部; 33、第五齿部;34、第六齿部;35、第七齿部;36、转轴;37、传动齿;38、第二壳座;39、第一气 缸;40、夹持件;41、支架;42、摄像头;43、橡胶垫。











