
技术摘要:
本发明公开了一种基于微机的高精度多维线激光传感器及工作方法,所述基于微机的高精度多维线激光传感器包括:底板、线激光发射器、相机、微型计算机和外壳,所述线激光发射器通过激光固定架安装在底板的一端,所述相机旋转安装在底板的另一端,所述微型计算机安装在底 全部
背景技术:
三维立体成像技术中,需要先利用传感器采集物体的立体状态信息,现有技术主 要是针对小视场的高精度传感器,主要是国外产品,比如日本基恩士、德国SICK公司的产 品,主要应用于在线检测、高精度测量,但是价格高,视场小,没法满足大视场应用,及大量 的装备设备。大视场的传感器,基本是相机和激光组成,将相机的控制通过USB3.0接口或者 网线接口与上位机电脑相连,往往这种有线连接需要通过拖链布设,导致有线传输媒介的 疲劳发生,导致传输不稳定,经常出现问题 对于大视角的测量,由于需要激光投射较远距离而产生发散和衰减,照射到物体 表面后条纹变粗,环境光线噪音较多,现有的大视场的传感器会产生较大的测量误差。
技术实现要素:
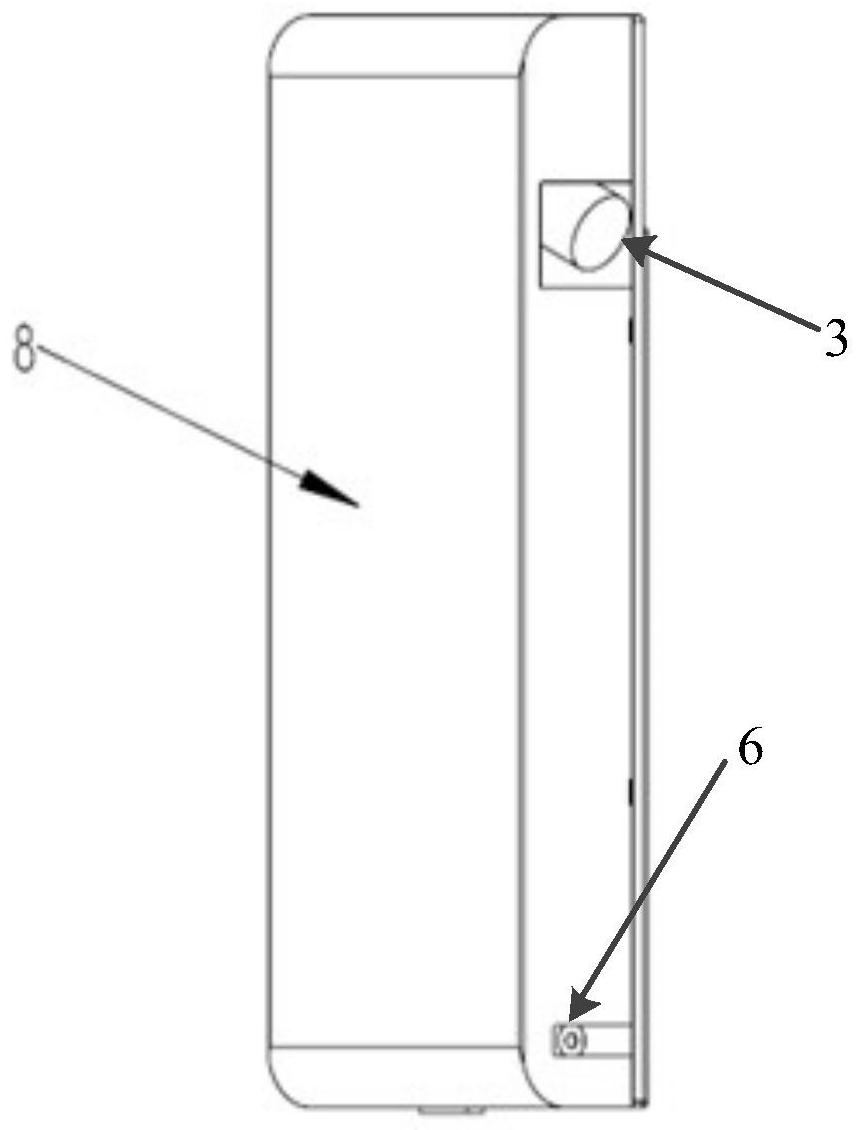
为此,本发明提供一种基于微机的高精度多维线激光传感器及工作方法,以解决 现有线激光传感器视角小、造价高的问题。 为了实现上述目的,本发明提供如下技术方案: 根据本发明的第一方面,公开了一种基于微机的高精度多维线激光传感器,所述 基于微机的高精度多维线激光传感器包括:底板、线激光发射器、相机、微型计算机和外壳, 所述线激光发射器通过激光固定架安装在底板的一端,所述相机旋转安装在底板的另一 端,所述微型计算机安装在底板上,位于线激光发射器和相机之间,所述外壳覆盖整体底 板,在外壳的侧面对准线激光发射器的发射端和相机的镜头处均开设有方孔。 进一步地,所述底板上安装有线激光发射器、相机和微型计算机,相机和微型计算 机之间通过USB3.0数据线连接,实现数据传输的同时为相机供电,底板上与线激光发射器 相邻处安装有供电控制端子,所述供电控制端子的供电部分与电源连接,为线激光发射器 和微型计算机供电,所述供电控制端子的控制部分与脉冲信号连接,通过供电控制端子与 相机相连,实现对相机采集的开关控制。 进一步地,所述底板的一侧安装有相机固定架,所述相机固定架上安装相机,相机 与相机固定架之间旋转安装,相机在相机固定架上能够在3°-60°的范围内转动。 进一步地,所述底板上远离相机固定架的一侧安装有激光固定架,激光固定架上 安装线激光发射器,线激光发射器向外发射线状激光。 进一步地,所述底板中央安装有微型计算机,所述微型计算机与相机连接,相机接 收经过物体表面反射的线状激光,微型计算机处理激光图像并提取激光条纹,将像素坐标 转换为物理坐标,并将物理坐标发送至上位机处理器。 进一步地,所述微型计算机连接有无线通信装置,所述无线通信装置将物理坐标 4 CN 111595268 A 说 明 书 2/4 页 信息发送至上位机处理器,无线通信装置能够进行5G无线断点续传。 根据本发明的第二方面,公开了一种基于微机的高精度多维线激光传感器的工作 方法,所述方法为: 线激光发射器发射线状激光,线状激光照射到物体表面后,进行反射; 相机接收经过物体表面反射的线状激光,并将接收的激光图像传送至微型计算 机; 微型计算机对激光图像进行处理,提取激光条纹,将像素坐标转换成物理坐标,并 将物理坐标通过无线通信装置发送至上位机的处理器。 进一步地,所述微型计算机对激光图像进行处理的方法为:沿着激光线径向按照 像素亮度拟合高斯曲线,然后提取曲线的峰值坐标,作为该点的像素坐标,提高像素坐标的 提取精度,不受物体表面材质的影响,精确提取了像素坐标后,依据特定对应关系,将像素 坐标转换为物理坐标。 进一步地,所述特定对应关系为:依靠传感器的基础标定参数进行确定,在传感器 的基础标定阶段,按照一定的间隔,对测量空间内具有已知物理坐标的每一个点逐个采集 成像,分别获得这些点的像素坐标,逐个建立起像素坐标和物理坐标的对应关系,标定对应 参数存储在传感器的微型计算机中,每次提取完激光条纹的像素坐标后,通过对应参数即 可转换为真实物理坐标。 本发明实施例具有如下优点: 本发明公开了一种基于微机的高精度多维线激光传感器及工作方法,通过大视 场、高精度、低成本的多维线激光发射器发射线状激光,利用相机接收物体表面反射的线状 激光,微型计算机采用新的图像提取计算方法,提高了采集精度和抗干扰能力,将处理后的 物理坐标数据压缩通过5G无线断点续传技术将数据上传到上位机电脑,保证数据传输的完 整性和稳定性。 附图说明 为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方 式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅 仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 提供的附图引申获得其它的实施附图。 本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供 熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的 实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功 效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。 图1为本发明实施例提供的一种基于微机的高精度多维线激光传感器的整体结构 示意图; 图2为本发明实施例提供的一种基于微机的高精度多维线激光传感器内部结构示 意图; 图中:1-底板、2-相机固定架、3-相机、4-微型计算机、5-激光固定架、6-线激光发 射器、7-供电控制端子、8-外壳。 5 CN 111595268 A 说 明 书 3/4 页











