
技术摘要:
本发明公开了一种用于轨道杆号牌内容的连续识别纠正装置和方法,涉及列车定位技术领域,包括包括车厢、图像采集装置、图像处理装置与显示装置,所述图像采集装置与所述图像处理装置连接,所述图像处理装置与所述显示装置连接,通过判断图像中线杆的数量,当线杆有多个 全部
背景技术:
列车定位是列车运行控制的一项关键技术,在轨道交通信号系统中发挥着重要作 用。实时准确地获取列车位置信息,是轨道交通高效、安全运行的保障,是提高效率、发挥运 能的前提。通过列车定位使列车追踪间隔减少,有利于轨道交通往高密度、大运量的方向发 展。 目前常用的列车定位技术包括:基于轨道电路的列车定位,基于应答器的列车定 位,基于卫星定位系统的列车定位等。其中,基于轨道电路的列车定位技术是一种粗精度的 定位方法,定位精度完全取决于轨道区段长度;基于应答器的列车定位是一种点式定位,其 具有抗干扰性强、无定位盲区、工作稳定等特点,但为了实现列车连续精确定位,需要在轨 道中铺设大量应答器,故投资巨大;采用卫星定位系统的列车定位精度高、维护方便,但是 在周围阻挡物多的地方,例如山林、城市、隧道等地方存在定位盲区。 列车以里程计作为定位的主要依据,采用高精度里程计可以获得毫米级的连续位 置信息,但实际中,由于车轮打滑、空转或者车轮磨损等原因,容易使里程计存在累积误差。 列车控制系统中,通常利用具有固定精确位置的轨道电路分界点或应答器来消除该误差。 而高密度铺设应答器成本昂贵,并且有些线路没有轨道电路,无法布设应答器。 现有的技术通过对轨道旁的标识图像进行识别分析,识别出杆号牌的数据信息, 以及列车经过杆号牌的时机,并以此进行列车位置定位及校正,但是因为列车的车速快,并 且需要对杆号牌内容进行连续识别,有可能漏采集某个杆号牌以至于识别错误,最终导致 定位出现错误的问题。
技术实现要素:
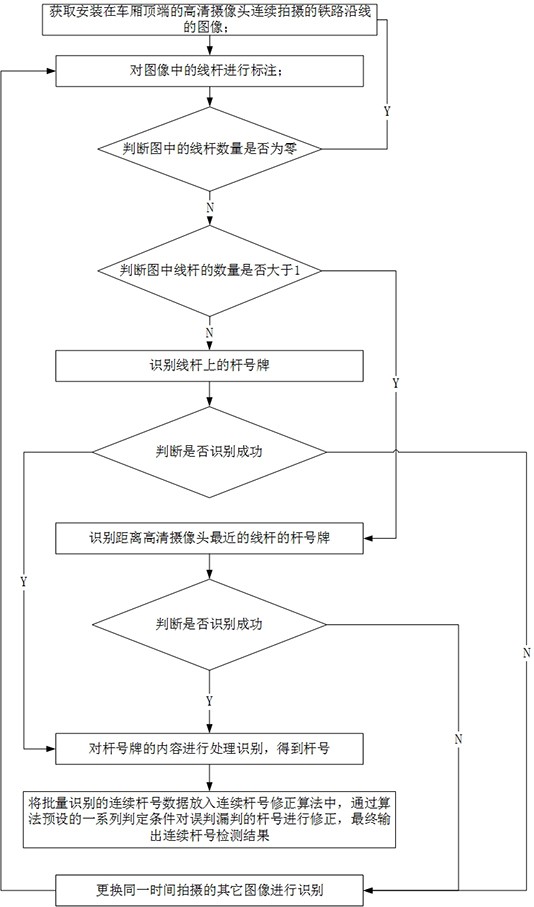
本发明的目的在于克服现有技术的不足,提供一种一种用于轨道杆号牌内容的连 续识别纠正装置和方法。 本发明的目的是通过以下技术方案来实现的: 一种用于轨道杆号牌内容的连续识别纠正装置,包括车厢、图像采集装置、图像处理装 置与显示装置,所述图像采集装置与所述图像处理装置连接,所述图像处理装置与所述显 示装置连接; 所述图像采集装置包括高清摄像头、第一光传感器、补光灯、控制器、第一传输单元与 第二传输单元,所述高清摄像头与所述第一传输单元连接,所述第一传输单元、第一光传感 器、补光灯、第二传输单元与所述控制器连接; 所述图像处理装置包括第二接收单元、图像处理单元、计算纠正单元与处理器,所述第 二接收单元与所述图像处理单元连接,所述图像处理单元与所述计算纠正单元连接,所述 4 CN 111591321 A 说 明 书 2/6 页 计算纠正单元与所述处理器连接,所述处理器与所述显示装置连接; 所述第二传输单元的输出端与所述第二接收单元的输入端连接; 优选的,还包括里程编码器,所述里程编码器与所述处理器连接,所述里程编码器固定 安装在所述车厢的轮轴端用于测量所述车厢的里程数据。 通过采用上述技术方案,通过融合图像数据和所述里程编码器的数据实现铁路定 位。 优选的, 所述图像采集装置还包括第二光传感器,所述第二光传感器与所述控制 器连接,所述控制器内设置有正常的光信号阈值范围,当第一光传感器传输给控制器的光 信号不属于正常的光信号阈值范围的时候,控制器启动第二光传感器进行外部光线信号检 测。 通过采用上述技术方案,当第一光传感器出现故障的时候,可以启动第二光传感 器继续进行光线检测。 优选的,所述车厢顶端还安装有无线路由器,该路由器内配备了4G的SIM卡,通过 利用SIM卡连接至电信、移动或联通的通信基站进行定位。 优选的,在列车底安装多普勒雷达传感器,使其对着轨道扣件发射电磁波,多普勒 雷达随着车辆不断行进使得雷达接收到的电磁波跟发射出去的电磁波之间存在多普勒效 应,计算车辆相对地面的运行速度,进而实现车辆运行位置的定位。 一种用于轨道杆号牌内容的连续识别纠正方法,包括以下步骤: 步骤1,第一光传感器检测外部光线信号并传输给控制器,如果外部光线信号大于等于 控制器内设定的阈值,则控制器控制安装在车厢顶端的高清摄像头连续拍摄铁路沿线的图 像;如果外部光线信号小于控制器内设定的阈值,则控制器控制补光灯打开的同时控制高 清摄像头连续拍摄铁路沿线的图像; 步骤2,高清摄像头将拍摄到的图像通过第一传输单元传输给控制器,控制器通过第二 传输单元将图像传输给第二接收单元,第二接收单元将图像传输到图像处理单元进行处 理,然后图像处理单元将处理识别后单杆号经过计算纠正单元进行纠正,计算纠正单元将 纠正后的结果传输给控制器,控制器将结果通过显示装置显示出来; 其中,对图像进行处理和纠正的步骤如下: 步骤1;获取安装在车厢顶端的高清摄像头连续拍摄的铁路沿线的图像; 步骤2:对图像中的线杆进行标注; 步骤3:判断图中的线杆数量是否为零,如果为零,执行步骤1,如果不为零,执行步骤4; 步骤4;判断图中线杆的数量,当线杆的数量为单个的时候,执行步骤5,当线杆数量>1 的时候,执行步骤6; 步骤5:识别线杆上的杆号牌,如果识别成功,则执行步骤7,如果识别失败,则执行步骤 8; 步骤6:识别距离高清摄像头最近的线杆的杆号牌,如果识别成功,则执行步骤7,如果 识别失败,则执行步骤8; 步骤7:对杆号牌的内容进行处理识别,得到杆号;执行步骤9; 步骤8:更换同一时间拍摄的其它图像进行识别;执行步骤2; 步骤9:将批量识别的连续杆号数据放入连续杆号修正算法中,通过算法预设的一系列 5 CN 111591321 A 说 明 书 3/6 页 判定条件对误判漏判的杆号进行修正,最终输出连续杆号检测结果。 所述对图像中的线杆进行标注的步骤如下: 步骤1,利用Sobel算子增强出线杆的竖直边缘; 步骤2,对利用Sobel算子增强出线杆的竖直边缘的结果进行二值化处理; 步骤3,使用hough变换检测直线;标记疑似的线杆两边的线; 所述识别距离高清摄像头最近的线杆是指选择最粗的线杆进行杆号识别; 所述将批量的连续杆号输入连续杆号修正算法中,将误判及漏判的杆号进行人为修 正,之后将杆号与所对应的线杆图像进行匹配,具体过程如下: 步骤1,对输入的杆号经过判定条件寻找起始杆号索引; 步骤2,将当前索引杆号数字与前后杆号三者进行差值计算比较,判断当前杆所在相对 位置; 步骤3,若前后杆差值为0,根据当前杆号最后一位数字与前后杆号的最后一位数字进 行比较,判断当前杆图像属于前项还是后项;若前后杆差值为4,则当前杆号为前后项杆号 的中间值; 步骤4,若以上情况都不符合,则开始对当前杆号进行逐位修正;同样是将当前杆号的 每一位依次与前后项进行比较,根据相等关系进行修改,最终完成杆号的修改; 步骤5,依次输出修改后的杆号,将杆号与所在图像文件路径相对应,最终输出完整的 连续杆号信息。 优选的,所述对杆号牌的内容识别的过程包括以下步骤; 步骤1,通过图像HSV分布情况快速定位要识别的杆号大致区域; 步骤2,通过图像处理算法精准提取杆号ROI,并对ROI区域进行二值化处理,分割出每 一个字符; 步骤3,利用SVM算法对每一个字符进行训练和识别; 步骤4,根据每个字符的特点,对结果进行后处理,进一步排除误识别。 通过采用上述技术方案,由于字符识别中可能存在误识别,所以需要针对识别后 的字符进行后处理。后处理主要根据每个字符的特点,通过对每个字符区域进行采样对比, 确定出识别的结果是否正确,同时利用缓存的历史数据进行对比分析,确定识别出的结果 是否正确。 本发明的有益效果是: 1、通过第一光传感器判断列车处于隧道外还是隧道内,将光线信号传输给控制器;控 制器通过决定是否启用补光灯,使得高清摄像头拍摄的图像更加清晰。 2、通过设置第二光传感器,当控制器判断第一光传感器出现故障的时候,可以启 用第二光传感器继续进行检测。 3、通过对图像中线杆的数量进行识别,选出最优识别的线杆,进一步提高对线杆 上杆号牌的识别成功率,然后通过对杆号牌上内容的识别,将杆号一一识别出来,经过计算 纠正处理,得到连续正确的杆号。 4、本发明还包括基站定位,开普勒定位,其目的是使定位效果更加精确,单一使用 上述的任意定位方法,都会导致部分定位产生误差或是定位不准,当现有的基站不能完全 覆盖所有的线路时,就会造成部分线路的定位缺失;单一使用多普勒雷达定位,多普勒雷达 6 CN 111591321 A 说 明 书 4/6 页 只能计算列车的运行速度,以及行驶公里数,但是无法获取列车的起始点位置。 附图说明 图1为本发明图像进行处理和纠正的流程图; 图2为本发明对连续杆号修正的流程图。











