
技术摘要:
本发明涉及自动化设备的端拾器,具体地说是一种机器人端拾器,压紧气缸及反抠气缸分别安装在基座上,压紧气缸的输出端连接有压板,反抠气缸的输出端通过升降导轨滑块与升降块相连,升降块上连接有升降板;升降块的两侧均设有水平块及连杆,每侧的水平块分别与基座滑动 全部
背景技术:
对于家电和卫浴行业的异型件,例如坐便器,通常采用人工搬运,劳动强度大,生 产效率低下,生产节拍可控性差;大强度的劳动容易引起搬运工人腰脱,工作环境的粉尘还 容易造成呼吸系统下降。
技术实现要素:
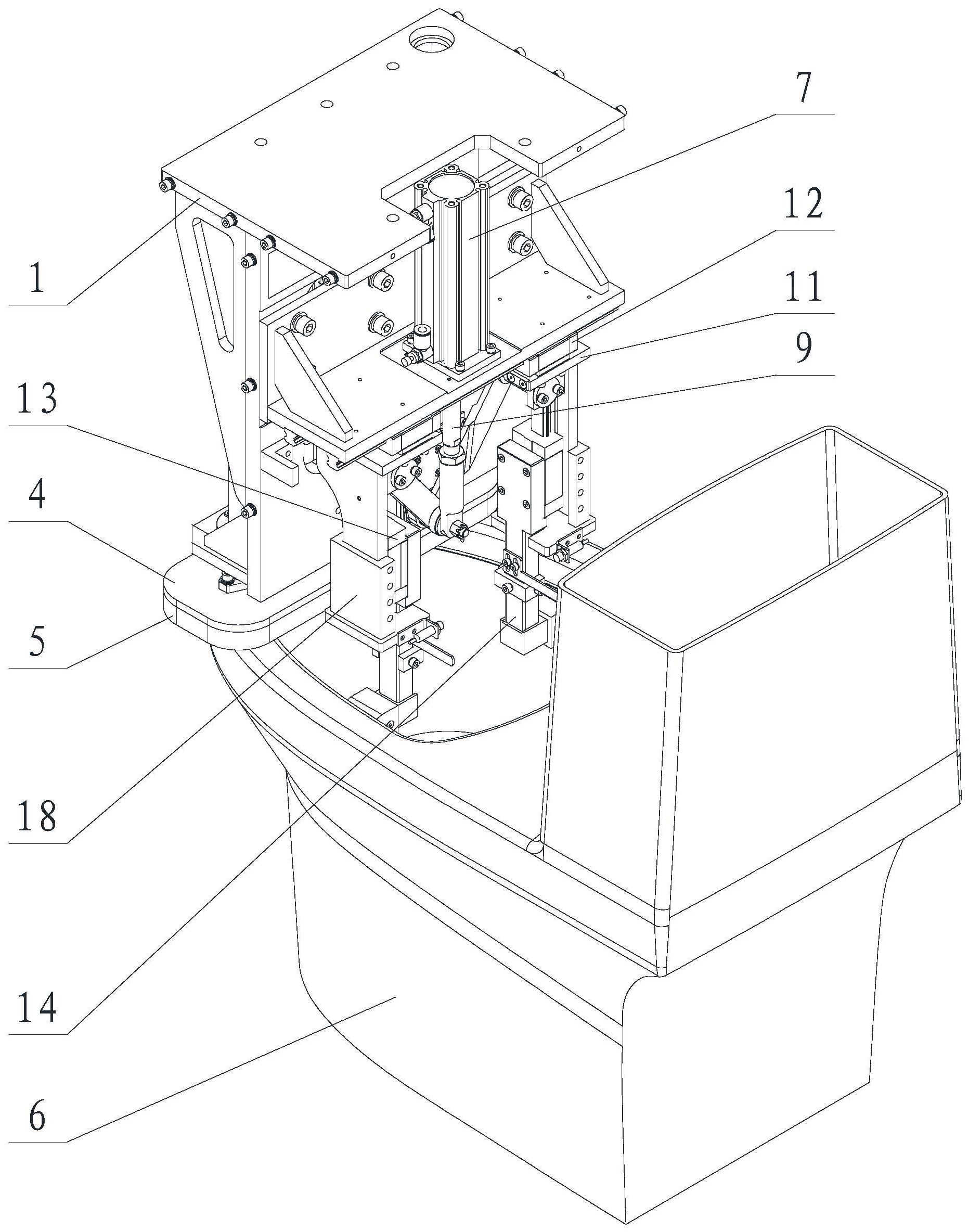
为了解决人工搬运存在的上述问题,本发明的目的在于提供一种能够适应包括家 电和卫浴行业在内的机器人端拾器。 本发明的目的是通过以下技术方案来实现的: 本发明包括基座、压紧气缸、压板、反抠气缸、升降块、升降导轨滑块、连杆、水平 块、反抠手指、升降连接板及升降板,其中压紧气缸及反抠气缸分别安装在基座上,该压紧 气缸的输出端连接有压板,所述反抠气缸的输出端通过升降导轨滑块与升降块相连,该升 降块上连接有升降板;所述升降块的两侧均设有水平块及连杆,每侧的水平块分别与基座 滑动连接,每侧所述连杆的一端铰接于升降块,另一端与同侧的所述水平块铰接;每侧所述 水平块上均安装有升降连接板,每侧的升降连接板上均滑动连接有反抠手指,所述升降板 的两侧分别与两侧的反抠手指相连;所述反抠气缸通过升降导轨滑块、升降块及连杆驱动 两侧的水平块同步滑动,进而带动两侧的所述反抠手指同步外扩或内缩,同时两侧的反抠 手指实现同步升降;所述压紧气缸驱动压板压在反抠手指一侧的被端拾物品上; 其中:所述升降导轨滑块的下端通过销轴与升降块连动,两侧的所述连杆的一端 分别铰接于该销轴上; 所述基座上安装有水平导轨,两侧的水平块分别通过水平导轨滑块与所述水平导 轨滑动连接; 每侧所述升降连接板上均安装有升降导轨,每侧所述反抠手指的上端通过升降滑 块与同侧的升降导轨滑动连接,下端安装有弹性手指套;所述弹性手指套与被端拾物品接 触的部位为斜平面或锥面; 所述压板的下表面安装有与被端拾物品接触的弹性压垫; 所述基座上安装有压紧导套,所述压板的上表面安装有由该压紧导套穿过的导 柱; 所述反抠手指钩住被端拾物品,所述压板压在该被端拾物品被钩住的一侧。 本发明的优点与积极效果为: 1.本发明自动化程度高,提高了工作效率及工作质量。 2.本发明实现了一侧弹性手指套钩住被端拾物品上提,另一侧压板压在被端拾物 品上,提供了一个反倾覆弯矩的力,使被端拾物品搬运平稳。 3 CN 111573559 A 说 明 书 2/3 页 附图说明 图1为本发明工作状态的立体结构示意图; 图2为本发明工作状态的结构主视图; 图3为图2中的A-A剖视图; 图4为本发明工作状态的结构左视图; 图5为图4的B-B剖视图; 图6为本发明工作状态的结构俯视图; 其中:1为基座,2为压紧气缸,3为压紧导套,4为压板,5为弹性压垫,6为坐便器,7 为反抠气缸,8为升降块,9为升降导轨滑块,10为连杆,11为水平块,12为水平导轨滑块,13 为升降滑块,14为反抠手指,15为弹性手指套,16为导柱,17为水平导轨,18为升降连接板, 19为升降导轨,20为升降板。











