
技术摘要:
本发明公开了一种基于单层双向循环神经网络的雷达目标识别框架,该方法首先进行预处理降低HRRP样本中的敏感性,然后建立动态调整层,对样本进行动态调整,紧接着的CNN层可在保留HRRP样本内所蕴含的序列相关性的同时,提取出HRRP包络中所含的信息,再通过双向RNN对时序 全部
背景技术:
雷达目标中的宽带雷达获取的高分辨一维距离像(High Resolution Range Profile,HRRP)反映了目标散射中心沿雷达视线方向的分布情况,其中包含了丰富的目标 结构和形状信息,因此基于HRRP的目标识别引起了国内外广泛的关注。因此,基于HRRP的雷 达自动目标识别方法逐步成为雷达自动目标识别领域研究的热点。 传统的特征提取方法在实验中取得了很好的识别性能,但是其识别方法存在一些 问题,其中包括:1)特征提取的方式大多是无监督且有损的,这意味着基于变换的特征提取 方法不能很好地将目标关注于寻找最大可分性特征上,可分性的信息将不可避免地在特征 提取的过程中损失掉一部分,不利于后端分类器的识别。2)特征提取方法的选择高度依赖 于研究人员对于HRRP数据的认知和经验的积累,在某些缺乏先验信息的情况下难以达到令 人满意的效果。 为了解决传统方法在特征提取上存在的问题,近年来,基于深度学习的方法被引 入到了雷达目标识别领域之中。深度学习可基于监督学习方法自动地提取样本的可分性特 征,改善了传统模型在特征提取方面的不足。基于深度学习的雷达高分辨距离像识别方法 大致可分为以下三类:(1)基于编码器-解码器结构的深度学习方法。(2)基于卷积神经网络 (CNN)结构的深度学习方法。(3)基于循环神经网络(RNN)的深度学习方法:该方法基于序列 相关性进行建模,虽然对物理结构特征进行建模描述,但是存在以下几个问题:(1)幅度较 小的距离单元中有可能会包含一些可分性很强的特征,但这些特征很少被用到;(2)RNN中 输入维数和时长是纠缠的(如:若HRRP为1x256维,选择输入维数为32,重叠面积为16,则时 长则为256/16-1=15),很难对这两个重要参数进行独立调整;(3)单向的RNN在预测时只能 利用当前时刻及当前时刻之前的结构信息,无法很好利用HRRP中蕴含的整体结构信息先 验。
技术实现要素:
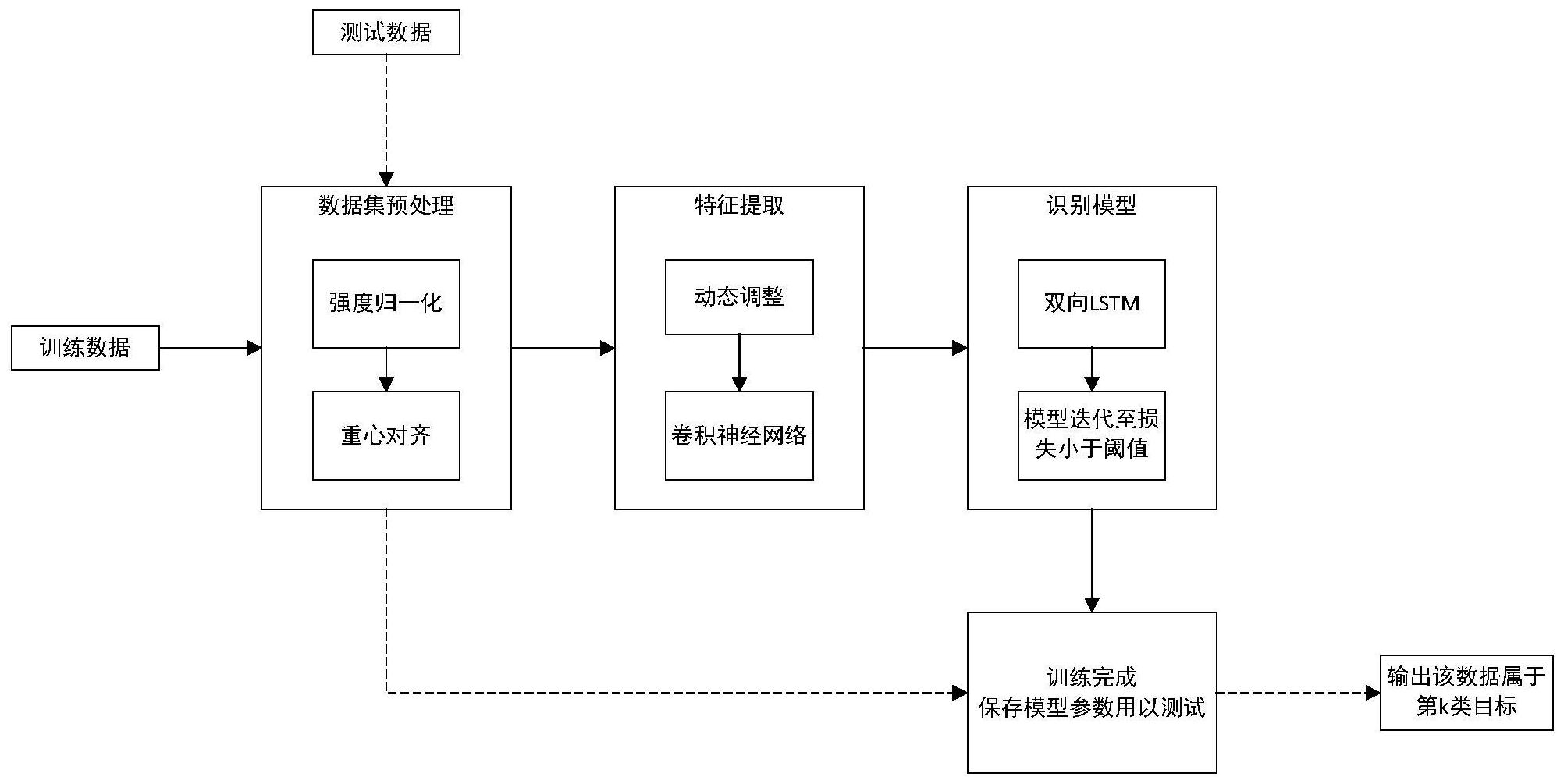
鉴于以上存在的技术问题,本发明用于提供一种基于单层双向循环神经网络的雷 达目标识别框架,该方法首先进行预处理降低HRRP样本中的敏感性,然后建立动态调整层, 对样本进行动态调整,紧接着的CNN层可在保留HRRP样本内所蕴含的序列相关性的同时,提 取出HRRP包络中所含的信息,再通过双向RNN对时序相关性建模,提取出其高层次特征,最 后通过softmax函数进行目标分类。 为解决上述技术问题,本发明采用如下的技术方案: 一种基于单层双向循环神经网络的雷达目标识别方法,包括以下步骤: S1,采集数据集,将雷达采集到的HRRP数据集依据目标的种类进行合并,每种种类 5 CN 111580097 A 说 明 书 2/8 页 的样本分别在不同的数据段里选择训练样本和测试样本,在训练集和测试集的选取过程 中,保证所选取的训练集样本与雷达所成姿态涵盖测试集样本与雷达所成的姿态,各类目 标训练集和测试集样本数的比例为8:2,将挑选的数据集记作T={(xi,yk)}i∈[1,n],k∈[1,c],其 中xi表示第i个样本,yk表示样本属于第k类,一共采集了c类目标,n表示样本总数; S2,对原始HRRP样本集进行预处理,由于HRRP的强度由包括雷达发射功率、目标距 离、雷达天线增益和雷达接收机增益的因素共同决定,在利用HRRP进行目标识别前,通过L2 强度归一化的方法对原始HRRP回波进行处理,从而改善HRRP的强度敏感性问题,HRRP通过 距离窗从雷达回波数据中截取,在截取的过程中录取的距离像在距离波门中的位置不固 定,从而导致了HRRP的平移敏感性,为了使训练和测试具备统一标准,用重心对齐法消除平 移敏感性; S3,在识别HRRP之前先加入动态调整层对HRRP进行整体的动态范围调整; S4,将动态调整后的时域特征送入CNN中进行调整; S5,在Tensorflow框架下搭建双向RNN分类网络并开启训练; S6,对由S1采集到的测试数据进行训练阶段的步骤S2、S3预处理操作; S7,将经过S6处理的样本送入S4、S5构建的模型中进行测试求得结果,即最后经过 注意力机制的输出通过softmax层进行分类。 优选地,所述步骤S2进一步包括: S201,强度归一化,假设原始HRRP表示为xraw=[x1,x2,…,xL],其中L表示HRRP内包 含的距离单元总数,则强度归一化之后的HRRP表示为: S202,样本对齐,平移HRRP使其重心g移至L/2附近,这样HRRP中包含信息的那些距 离单元将分布在中心附近,其中HRRP重心g的计算方法如下: 其中,xi为原始HRRP中第i维信号单元。 优选地,所述步骤S3进一步包括: 对HRRP样本进行动态调整,即对样本进行多个幂次的处理,动态调整层的输出表 示为: 其中,m0是动态调整层的通道数,第i个动态调整通道 表示为 其中,αi表示幂次变换的系数。 优选地,所述步骤S4进一步包括: S401,将经过上述处理的时域特征xHRRP输入进卷积层,卷积后的结果为 6 CN 111580097 A 说 明 书 3/8 页 其中,Fi表示第i个通道的卷积结果,xHRRP是时域特征频率维度的HRRP样本, 表示 卷积操作,Ki为第i个卷积核,bi表示第i个卷积核对应的偏置; 假设一个mini-batch包含了N个HRRP样本,通过卷积之后其输出表示为: 其中第i个HRRP样本对应的输出 是一个四维矩阵, 其中通道数为 K,每个通道内包含P个输出值; S402,将卷积后的特征提取输入批量归一化层。第i个HRRP样本对应的输出 中第 k个通道中第p个元素 经过归一化层的输出为 其中γk和βk为可训练的对应于第k个通道的参数, 为标准化后的 其中ε是一个极小数, 为该元素的均值, 为该元素的方差,可按照 如下公式计算: S403,批量归一化层后接ReLU激活函数进行非线性激活,若输入为 则经过 ReLU之后的得到的输出表示为: 优选地,所述步骤S5进一步包括: S501,设置网络的超参数,包括隐单元的维数,学习率,迭代批次;设置网络优化目 标和优化器;初始化所有待训练的权重和偏置; S502,将训练样本送入已搭建完成的分类网络,假设输入的是特征F R N N, 其中M表示双向RNN的各时间点维数,N表示输入序列长 度,假设其输出为Foutput, 输出序列中第k 个时间点所对应的向量可表示为: 7 CN 111580097 A 说 明 书 4/8 页 其中,f(·)表示激活函数, 表示双向RNN中所包含的前向RNN的隐藏层输出矩 阵, 表示双向RNN中所包含的前向RNN中所包含的第k个隐藏层状态,同样地, 表示双 向RNN中所包含的后向RNN的隐藏层输出矩阵, 表示双向RNN中所包含的后向RNN中所包含 的第k个隐藏层状态,bF表示双向RNN的输出偏置; S503,将网络最后一个时间点的输出后接一个节点数为雷达类别数的全连接层, 即全连接层的输出为模型的预测结果,输出表示为: output=f(Foutput(k)Wo) 其中Foutput(k)是最后一个时间点的输出, l表示隐藏单元数,c表示类别 个数,f(·)表示softmax函数; S504,损失函数设计为交叉熵,通过使用训练数据计算损失函数相对于参数的梯 度来学习参数,并在模型收敛时固定学习的参数,采用基于交叉熵的代价函数,表示为: 其中,N表示一个批次中训练样本的个数,en是one-hot向量,用于表示第n个训练 样本的真实标签,P(i|xtrain)表示训练样本对应于第i个目标的概率。 优选地,所述步骤S7进一步包括: 第i个HRRP测试样本 对应于目标集中第k类雷达目标的概率计算为: 其中exp(·)表示取指数运算,c表示类别个数; 通过最大后验概率将测试HRRP样本xtest分类到最大目标概率的k0中: 采用本发明具有如下的有益效果: (1)本发明实施例中应用动态调整层。因为某些较好的可分性特征可能由于相对 幅值的原因,很难影响后续分类器的决策,通过动态调整层在各距离单元大小相对关系未 发生改变的前提下通过模型训练以决定如何调整HRRP的整体动态,以达到更好的识别效 果。 (2)本发明实施例中应用卷积神经网络对HRRP进行特征提取,使后续输入的RNN模 型的维数可通过控制CNN的卷积核进行独立控制。 (3)本发明实施例应用双向的循环神经网络,该网络不仅可以更好的利用雷达目 标的整体固定的物理结构特性这一先验,即在预测的时候不仅可以利用当前时刻及之前时 刻的结构信息,而且还可以利用当前时刻之后的结构信息它将HRRP数据分正反双向分别输 入两个独立的RNN模型,并将得到的隐层进行拼接,这样可改善单向RNN的缺陷,使之可更好 的对HRRP内部蕴含的物理结构特性进行建模。 8 CN 111580097 A 说 明 书 5/8 页 附图说明 图1为本发明实施例的基于单层双向循环神经网络的雷达目标识别方法的步骤流 程图。











