
技术摘要:
本申请提出一种红绿灯的识别方法、装置、电子设备和计算机存储介质,涉及无人驾驶技术领域,其中,方法包括:获取红绿灯当前时刻的当前候选颜色状态,获取各历史时刻的历史候选颜色状态和对应的识别概率,根据各历史时刻的历史候选颜色状态和对应的识别概率、颜色状态 全部
背景技术:
随着社会和经济的快速发展,无人驾驶车辆越来越受到人们的关注,原因在于无 人驾驶车辆能够减少交通事故导致的人员伤亡,并且可以替代驾驶员完成特殊的作业。而 在无人驾驶领域,准确识别路口的红绿灯颜色,对于交通安全至关重要。 相关技术中,通常是采用基于深度学习的模型对红绿灯的当前颜色状态进行识 别,但是利用模型识别,无法确保每一帧的识别结果都是正确的,从而模型识别结果的准确 度无法保证。
技术实现要素:
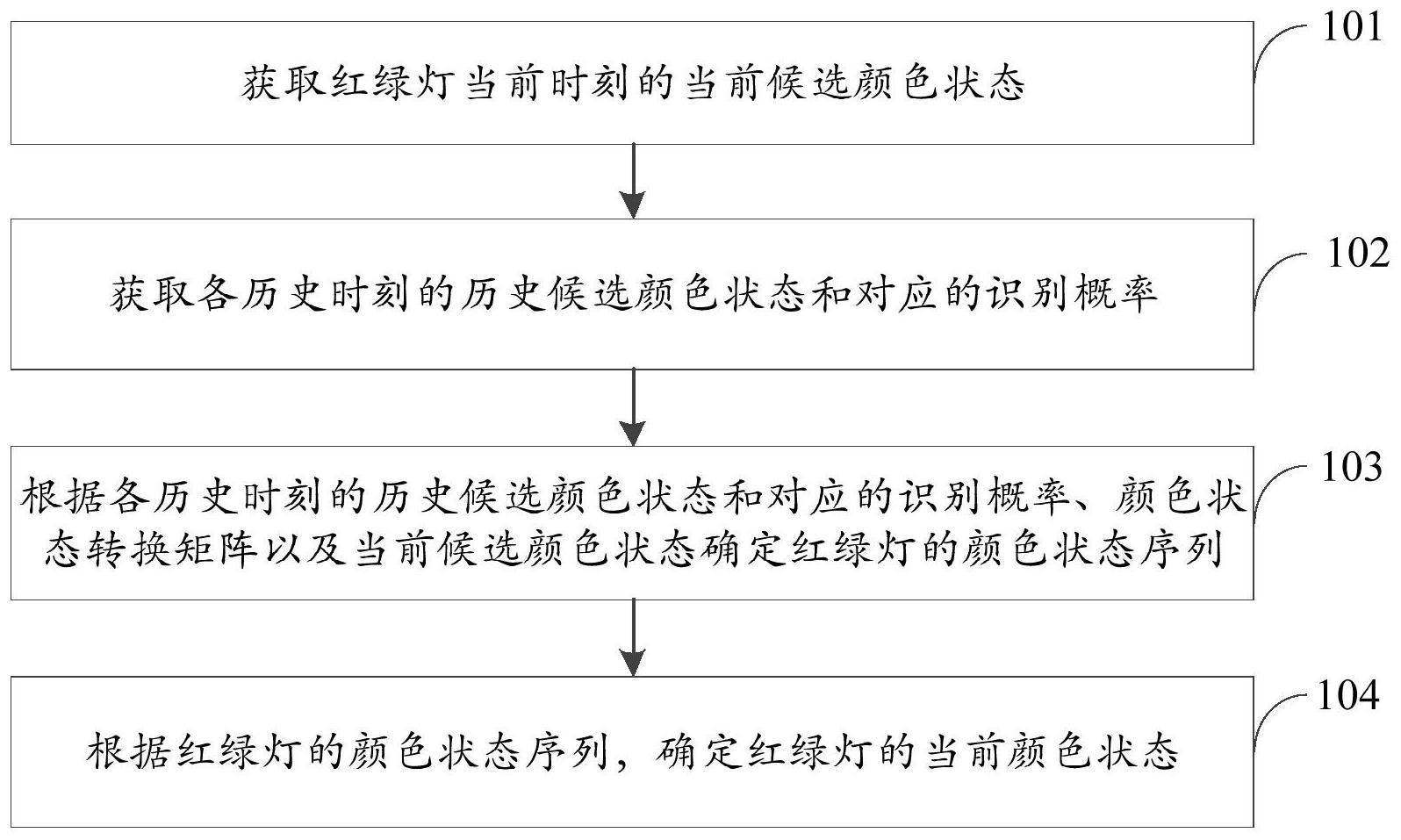
提供了一种用于跨模态处理方法、装置、电子设备和计算机存储介质。 根据第一方面,提供了一种红绿灯的识别方法,通过引入当前识别结果的相关的 信息,即历史时刻的识别结果和颜色状态转换矩阵,确定当前的识别结果,提高了红绿灯识 别的准确度,解决现有技术中单纯依靠模型识别的结果,红绿灯识别准确度较低的技术问 题。 本申请的第二方面提出一种红绿灯的识别装置。 本申请的第三方面提出一种电子设备。 本申请的第四方面提出一种非临时性计算机可读存储介质。 本申请第一方面实施例提出了一种红绿灯的识别方法,包括: 获取红绿灯当前时刻的当前候选颜色状态; 获取各历史时刻的历史候选颜色状态和对应的识别概率; 根据所述各历史时刻的历史候选颜色状态和对应的识别概率、颜色状态转换矩阵 以及所述当前候选颜色状态,生成所述红绿灯的颜色状态序列; 根据所述红绿灯的颜色状态序列,确定所述红绿灯的当前颜色状态。 本申请第二方面实施例提出了一种红绿灯的识别装置,包括: 获取模块,用于获取红绿灯当前时刻的当前候选颜色状态,以及获取各历史时刻 的历史候选颜色状态和对应的识别概率; 生成模块,还用于根据所述各历史时刻的历史候选颜色状态和对应的识别概率、 颜色状态转换矩阵以及所述当前候选颜色状态,生成所述红绿灯的颜色状态序列; 确定模块,用于根据所述红绿灯的颜色状态序列,确定所述红绿灯的当前颜色状 态。 本申请第三方面实施例提出了一种电子设备,包括存储器、处理器及存储在存储 器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时,实现如第一方面所 5 CN 111582030 A 说 明 书 2/12 页 述的红绿灯的识别方法。 本申请第四方面实施例提出了一种非临时性计算机可读存储介质,其上存储有计 算机程序,该程序被处理器执行时实现如第一方面所述的红绿灯的识别方法。 本申请实施例所提供的技术方案可以包含如下的有益效果: 获取红绿灯当前时刻的当前候选颜色状态,获取各历史时刻的历史候选颜色状态 和对应的识别概率,根据各历史时刻的历史候选颜色状态和对应的识别概率、颜色状态转 换矩阵以及当前候选颜色状态,生成红绿灯的颜色状态序列,通过引入当前识别结果的相 关的信息,即历史时刻的识别结果和颜色状态转换矩阵,确定当前的识别结果,提高了红绿 灯识别的准确度。 应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特 征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。 附图说明 附图用于更好地理解本方案,不构成对本申请的限定。其中: 图1为本申请实施例所提供的一种红绿灯的识别方法的流程示意图; 图2为本申请实施例提供的另一种红绿灯的识别方法的流程示意图; 图3为本申请提供的各历史时刻的候选颜色状态示意图; 图4为本申请提供的各候选路径的示意图; 图5为本申请实施例提供的颜色状态转换矩阵示意图; 图6为本申请实施例提供的又一种红绿灯的识别方法的流程示意图; 图7为本申请实施例提供的再一种红绿灯的识别方法的流程示意图; 图8为本申请实施例提供的一种红绿灯的识别装置的结构示意图;以及 图9为本申请实施例提供的的红绿灯的识别方法的电子设备的框图。











