
技术摘要:
本发明实施例提供一种高超声速飞行器纵向系统的预设性能控制方法,方法包括:分别构造飞行器的飞行速度V的误差函数和飞行高度h的误差函数,且构造相应的变换后的飞行速度的误差函数S1和飞行高度的误差函数S2;设计飞行器的飞行速度V的高阶导数的可控部分αv和飞行高度h 全部
背景技术:
针对控制方向未知的飞行器系统,目前主要有两种方法能够实现其控制问题。 第一种方法是Nussbaum增益法,该方法被应用于各种不同形式的系统中,例如自 适应系统、严格反馈非线性系统等;第二种方法是直接对方向未知参数进行估计,但该方法 具有很大局限性,需要在严格的假设条件下才能成立。
技术实现要素:
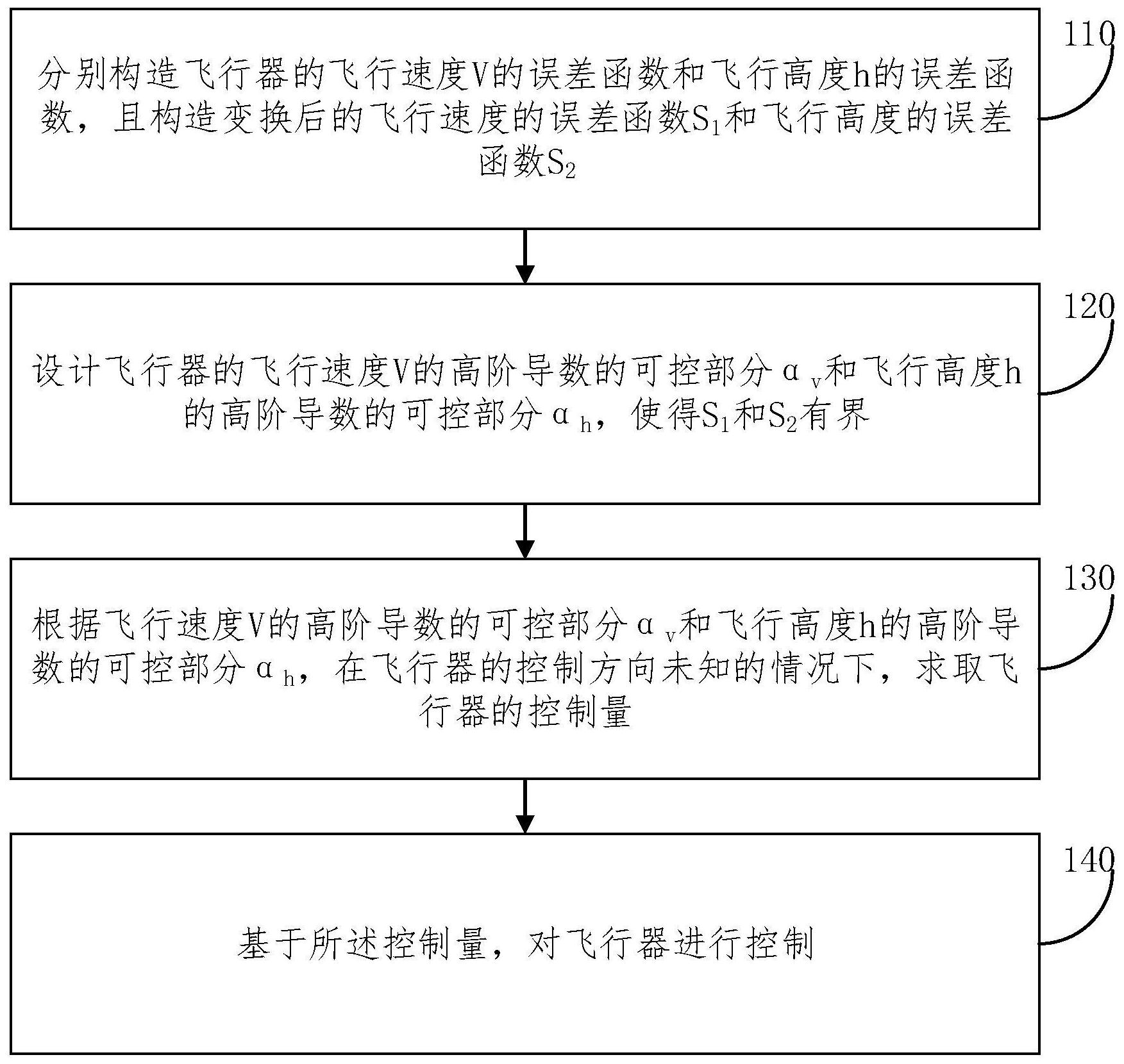
为克服上述现有问题或者至少部分地解决上述问题,本发明实施例提供一种高超 声速飞行器纵向系统的预设性能控制方法,该方法具体包括: 分别构造飞行器的飞行速度V的误差函数和飞行高度h的误差函数,且构造变换后 的飞行速度的误差函数S1和飞行高度的误差函数S2; 设计飞行器的飞行速度V的高阶导数的可控部分αv和飞行高度h的高阶导数的可 控部分αh,使得S1和S2有界; 根据飞行速度V的高阶导数的可控部分αv和飞行高度h的高阶导数的可控部分αh, 在飞行器的控制方向未知的情况下,求取飞行器的控制量; 基于所述控制量,对飞行器进行控制。 优选地,该方法中,所述分别构造飞行器的飞行速度V的误差函数和飞行高度h的 误差函数,且构造变换后的飞行速度的误差函数S1和飞行高度的误差函数S2,具体包括: 计算飞行器的飞行速度V的高阶导数,并提取高阶导数中的可控部分αv,根据可控 部分αv构造飞行器的飞行速度V的误差函数ev=V-Vd,其中,V为飞行器的实际飞行速度,Vd 为飞行速度的期望值; 根据误差函数ev构造飞行速度子系统的滑模面sv,且根据滑模面sv构造飞行速度V 的误差变换函数e1和变换后的误差函数S1; 计算飞行器的飞行高度h的高阶导数,并提取高阶导数中的可控部分αh,根据可控 部分αh构造飞行器的飞行高度h的误差函数eh=h-hd,其中,h为飞行器的实际飞行高度,hd 为飞行高度的期望值; 根据误差函数eh构造飞行高度子系统的滑模面sh,且根据滑模面sh构造飞行高度h 的误差变换函数e2和变换后的误差函数S2。 优选地,该方法中,所述飞行器的飞行速度V的高阶导数的可控部分αv表示为: αv=b11βc b12δe; 其中,βc为输入燃料当量比β的指令信号,δe为升降舵偏角; 计算ev的三阶导数: 6 CN 111596686 A 说 明 书 2/16 页 其中,fv为可计算出的数值; 确定飞行器的飞行速度子系统的滑模面为: 其中,λv为常数; 构造飞行速度V的误差变换函数e1为: e1=sv ksv∫svdt; 其中,kIv为大于0的常数,ksv为大于0的常数,且kIv和ksv均为设计参数; 定义误差变换函数为 其中, 为预设性能函数,Φ为平滑、严增且可逆 的函数,e1和S1的导数为: 式中, 其中, 式中,ρ为空气密度,V为飞行速度,S为机翼面积,ωn为自然震荡频率,m为飞行器 质量,α为迎角, 为机翼平均气动弦长,Iyy为转动惯量,T为推力,D为阻力; ce=0.0292 优选地,该方法中,所述飞行器的飞行高度h的高阶导数的可控部分αh表示为: αh=b21βc b22δe; 其中,βc为输入燃料当量比β的指令信号,δe为升降舵偏角; 计算eh的四阶导数: 其中,fh为可计算出的数值; 确定飞行器的飞行高度子系统的滑模面为: 其中,λh为常数; 7 CN 111596686 A 说 明 书 3/16 页 构造飞行速度h的误差变换函数e2为: e2=sh ksh∫shdt; 其中,kIh为大于0的常数,ksh为大于0的常数,且kIh和ksh均为设计参数; 定义误差变换函数为 其中, 为预设性能函数,Φ为平滑、严增且可 逆的函数,e2和S2的导数为 式中, 其中, 式中,ρ为空气密度,V为飞行速度,S为机翼面积,ωn为自然震荡频率,m为飞行器 质量,α为迎角,γ为弹道倾角, 为机翼平均气动弦长,Iyy为转动惯量,T为推力,L为升力,D 为阻力; ce=0.0292 优选地,该方法中,所述设计飞行器的飞行速度V的高阶导数的可控部分αv使得S1 有界包括: 设计 式中,k1>0,ksv>0是设计参数, 定义Lyapunov函数: 则有: 将式 代入上式中可得: 确定S1有界。 8 CN 111596686 A 说 明 书 4/16 页 优选地,该方法中,所述设计飞行器的飞行高度h的高阶导数的可控部分αh使得S2 有界包括: 设计 式中,k2>0,ksh>0是设计参数, 选择Lyapunov函数为 则有: 将公式 代入上述公式可得: 确定S1和S2有界。 优选地,该方法中,所述根据飞行速度V的高阶导数的可控部分αv和飞行高度h的 高阶导数的可控部分αh,在飞行器的控制方向未知的情况下,求取飞行器的控制量包括: 在b11、b12、b21和b22符号未知的情况下,令控制量u=[βc,δe],采用如下公式计算u: u=N(ζn)ηn; 其 中 , η n = [αv α ] Th ,N (ζn ) 为 N u s s b a u m 函 数 , rn11和rn22为待给定的常数。 本发明实施例提供一种高超声速飞行器纵向系统的预设性能控制方法,通过构造 飞行速度的误差函数S1和飞行高度的误差函数S2,确定能使得S1和S2有界的飞行速度的高 阶导数的可控部分αv和飞行高度的高阶导数的可控部分αh,基于确定出得αv和αh求取飞行 器的控制量,最后根据所述控制量对飞行器进行控制,实现了在控制方向未知情况下,实现 预设性能跟踪,进而使得飞行器在飞行过程中保持稳定状态。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图做一简单地介绍,显而易见地,下面描述中的附图是本发 明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根 据这些附图获得其他的附图。 图1为本发明实施例提供的高超声速飞行器纵向系统的预设性能控制方法整体流 9 CN 111596686 A 说 明 书 5/16 页 程示意图; 图2为本发明实施例提供的迎角跟踪仿真曲线图; 图3为本发明实施例提供的高度误差仿真曲线图; 图4为本发明实施例提供的飞行速度误差函数仿真曲线图; 图5为本发明实施例提供的δe的仿真曲线图; 图6为本发明实施例提供的输入燃料当量比β曲线图。











