
技术摘要:
一种医院服务管理系统、医院服务机器人控制方法。本发明公开了一种医院服务管理系统,包括调度管理系统、移动终端、服务管理终端、医院管理服务器;所述医院管理服务器分别与移动终端、服务管理终端和调度管理系统连接;所述医院管理服务器用于协调调度管理系统和移动 全部
背景技术:
社会急需一种新型、多功能的机器人来帮助医护人员工作,分担医护 人员的压 力,更好的服务病人。
技术实现要素:
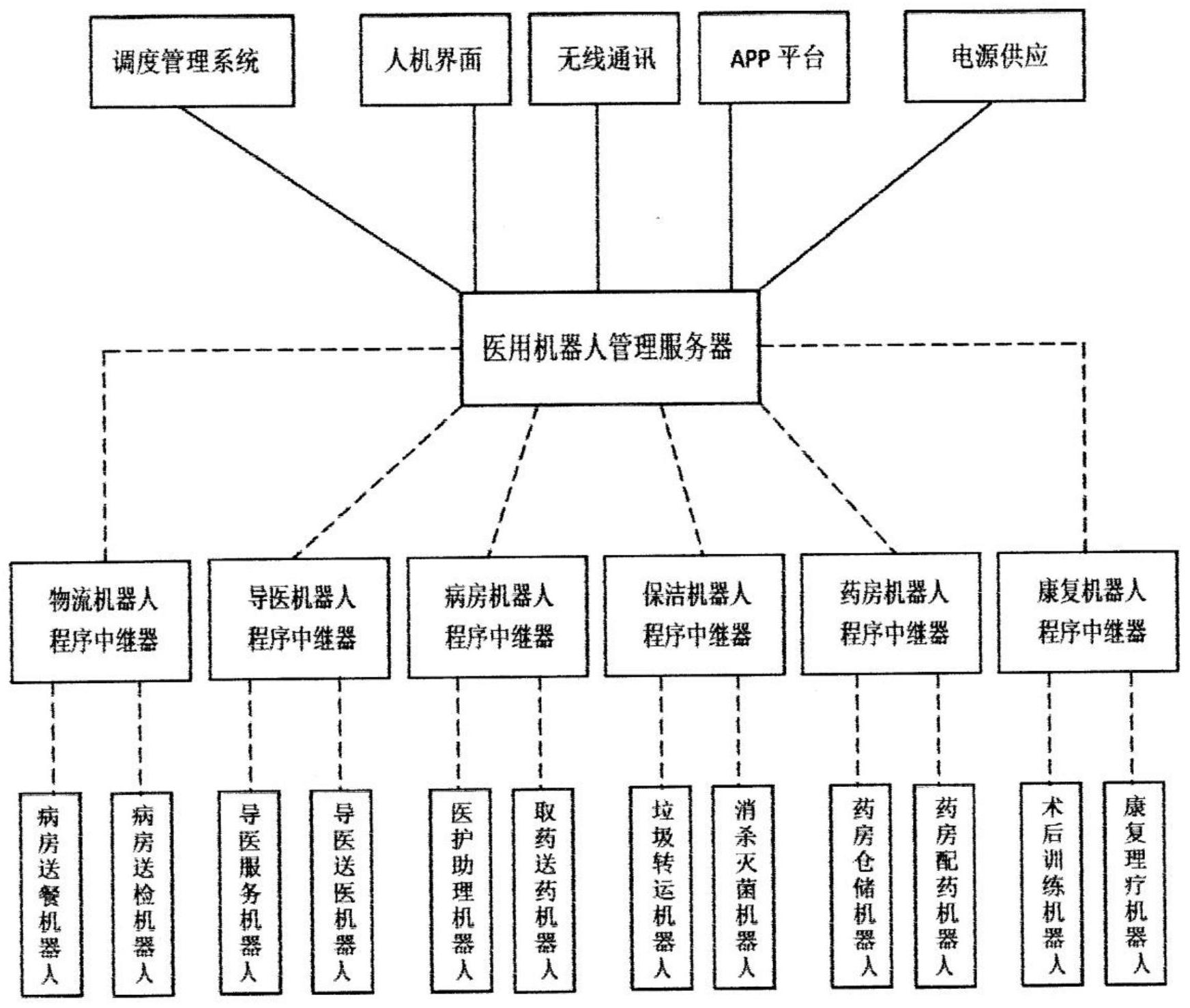
本发明的目的在于提供了一种医院服务管理系统,该系统集成多种功 能于移动 终端设备上,使其功能多样化,可以起到减少医院工作人员工作 量的目的,同时也增强了 沟通效率,使患者在医院内的常规操作更简单快 捷。 本发明的实施例是这样实现的: 一种医院服务管理系统,包括调度管理系统、移动终端、服务管理终 端、医院管理 服务器;所述医院管理服务器分别与移动终端、服务管理终 端和调度管理系统连接;所述 医院管理服务器用于协调调度管理系统和移 动终端之间、调度管理系统和服务管理终端 之间的信息互通; 所述调度管理系统用于接收移动终端或服务管理终端传送的有关医院 服务信息 的数据,所述调度管理系统根据所述数据作出相应的反应,且反 馈给移动终端或服务管理 终端; 所述移动终端为装载有功能模块的终端设备,所述功能模块包括物流 模块、导医 模块、病房管理模块、卫生管理模块、药房管理模块或护理模 块;任一所述移动终端至少装 载有一种功能模块。 在本发明的一些实施方式中,所述服务管理终端包括桌面服务管理终 端和非桌 面服务管理终端;所述非桌面服务管理终端包括平板、智能手机、 笔记本。 在本发明的一些实施方式中,所述医院管理服务器分别与移动终端、 服务管理终 端连接,所述连接的方式选自有线连接和/或无线连接。 在本发明的一些实施方式中,所述连接的方式选自无线连接,所述无 线连接包括 ZIGBEE、NB-IOT、WIFI、GPRS、3G、4G、5G、5G中的一种或多 种。 在本发明的一些实施方式中,所述移动终端选自人工智能机器人,所 述人工智能 机器人分别与调度管理系统、服务管理终端和医院管理服务器 无线连接;还包括中继系 统,所述中继系统包括用于定位和放大无线信号。 在本发明的一些实施方式中,所述人工智能机器人包括机体、驱动模 块、机器人 控制模块、人机界面、机器人无线通信模块、无线隔离模块、 电源模块、负载分析模块、保护 模块和探测模块; 所述驱动模块、机器人控制模块、人机界面、机器人无线通信模块、 无线隔离模 4 CN 111554389 A 说 明 书 2/6 页 块、电源模块、负载分析模块、保护模块和探测模块分别固定 在所述机体上; 所述驱动模块、负载分析模块、保护模块和探测模块分别与所述机器 人控制模块 信号连接,该驱动模块、负载分析模块、保护模块和探测模块 分别接收所述机器人控制模 块的控制信号,并分别与所述电源模块电连接; 所述机器人控制模块通过所述机器人无线 通信模块与所述调度管理系统连 接。 在本发明的一些实施方式中,所述中继系统包括定位模块、坐标控制 点、定位服 务器、中继放大器; 所述定位模块安装于所述人工智能机器人上,用于与定位服务器和坐 标控制点 相结合; 所述坐标控制点安装于室内和/或室外关键位置,具有精确坐标值,所 述坐标控 制点与所述定位服务器、所述定位模块进行实时通讯,用于动态 获取人工智能机器人的空 间信息,实现人工手动控制运动或自动导航运动; 所述定位服务器与所述定位模块和所述坐标控制点信号连接,通过内 置定位程 序算法计算所述定位模块与所述坐标控制点的相对位置,从而获 取所述扫地机器人运动 过程中的空间坐标,控制运行路线; 所述中继放大器安装于所述人工智能机器人上,用于将所收到的无线 信号进行 放大增强;或所述中继放大器安装在信号不易到达或信号受障碍 阻隔区域,用于将无线信 号进行放大增强。 在本发明的一些实施方式中,所述定位模块、定位服务器及坐标控制 点通过包括 GPS、北斗、手机基站、无线局域网、伪卫星、射频标签、超宽 带无线电、超声波中的一种或多 种方式实现对人工智能机器人运动的空间 定位及导航。 本发明还提供了一种医院服务机器人控制方法,采用任一上述的医院 服务管理 系统来控制智能机器人。 本发明实施例至少具有如下优点或有益效果: 本系统通过与医院现有各管理系统的对接,使用如手机APP等非桌面 管理端可以 实现各服务功能的控制和管理,通过移动网络或无线网络将命 令发送至医院管理服务器, 调度管理系统经过处理从已与系统对接的医院 各管理系统中读取数据或查找服务器自有 数据,将命令请求所需数据和信 息呈现给移动终端,进而移动终端直接相应的动作。采用 该系统可以减少 相关人员的工作量,使常规操作更简单智能化。 附图说明 为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需 要使用的 附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些 实施例,因此不应被看作 是对范围的限定,对于本领域普通技术人员来讲, 在不付出创造性劳动的前提下,还可以 根据这些附图获得其他相关的附图。 图1为本发明医院医疗机器人服务管理系统的系统框图; 图2为本发明机器人组成单元系统框图; 图3为本发明一具有病区食堂送餐、或DR CT MIR影像科送检、或垃 圾集中转运功 能的机器人系统示意图; 5 CN 111554389 A 说 明 书 3/6 页 图4为本发明一具有导医功能的机器人系统示意图; 图5为本发明一具有消杀灭菌功能的机器人系统示意图。 图中:人机界面1、触摸屏2、主机控制柜3、第一扬声器4、第一AGV 移动底盘5、第一 激光避障传感器6、左喷洒杆7、右喷洒杆8、第二扬声 器9、药液缺乏警示10、第二AGV移动底 盘11、第二激光避障传感器12。 其中,人机界面还内置微型摄像头。











