
技术摘要:
本发明为公开的地月L2点转移轨道最优误差修正点选择方法,属于航空航天技术领域。本发明实现方法为:建立地月旋转坐标系,计算地月L2点标称转移轨道状态转移矩阵;根据状态转移矩阵计算误差随时间的变化情况;根据状态转移矩阵,建立修正机动与修正时间和轨道误差的函 全部
背景技术:
为了实现月球背面探测,需要通过中继星进行中继通讯和数据传输,地月平衡点 L2点由于较好的动力学特性和几何位置是中继星的理想位置。将中继卫星部署在地月平衡 点L2点周期轨道需要进行转移轨道设计,其中利用三体系统动力学的月球旁近飞越转移所 需的燃料消耗较省且转移时间较短,是工程实施中较常用的方式。但是受探测器执行误差 和动力学模型误差等因素的影响,在实际任务中探测器的转移轨道与标称设计轨道有偏 差,需要执行误差修正。由于三体系统动力学非线性特征,转移轨道对误差敏感,误差可能 呈指数性发散,且不同位置施加修正所需的燃料消耗差异大。 已发展的关于转移轨道误差修正,在先技术[1](参见周文艳,杨维廉.月球探测器 转移轨道的中途修正[J].宇航学报,2009,25(1):89-92)研究了从地球至月球的转移轨道 中途修正方法,给出了修正量与终端约束的函数关系,但该方法未考虑从月球至地月L2点 段轨道,且基于惯性系进行分析,不适用于三体下的轨道修正。 在先技术[2](参见:李明涛,郑建华.平动点任务转移轨道中途修正研究[J].空间 科学学报,2010,30(6):540-546.)研究了日地平衡点转移的误差修正问题,提出采用逆向 积分的方式,将误差修正转化为转移轨道设计,但该方法未考虑修正点和修正时间的优化, 且主要针对日地平衡点转移,与月球旁近地月平衡点转移存在差异。
技术实现要素:
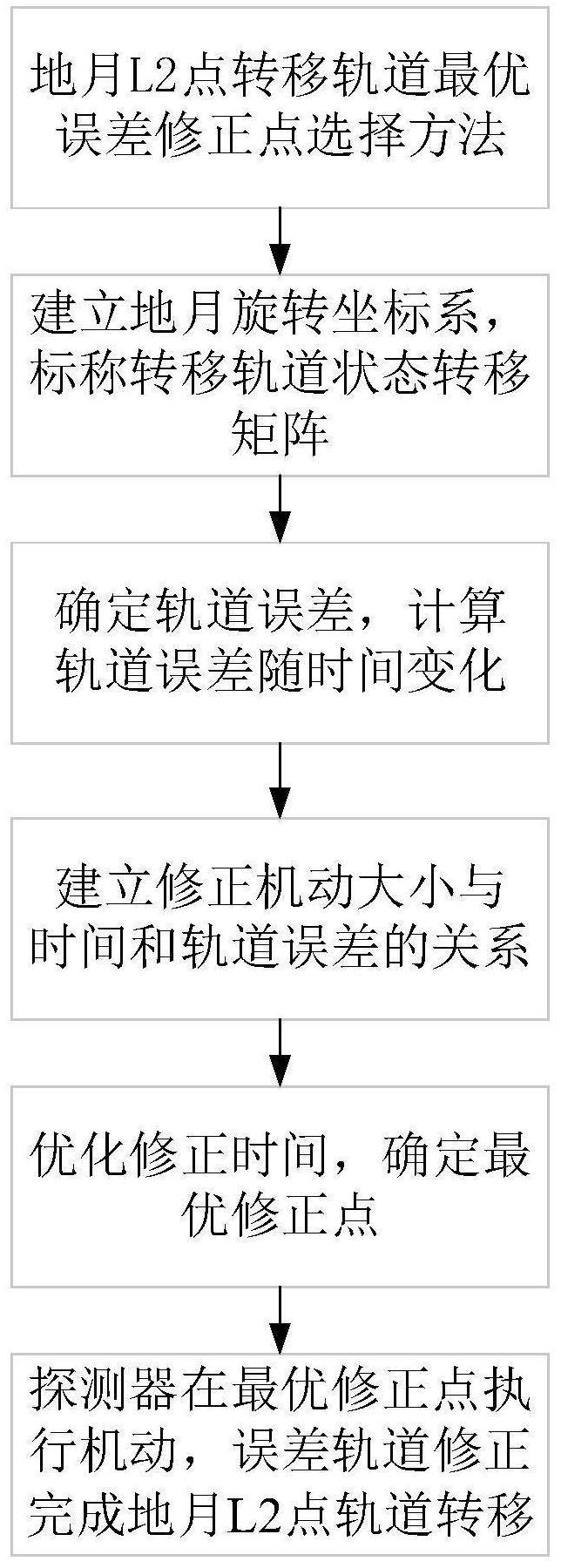
本发明公开的地月L2点转移轨道最优误差修正点选择方法要解决的技术问题是: 提供一种地月L2点转移轨道误差修正中最优误差修正点选取方法,能够使修正所需的速度 增量最小,具有修正效率高、降低修正燃料消耗的优点。 本发明的目的是通过下述技术方案实现的: 本发明为公开的地月L2点转移轨道最优误差修正点选择方法,建立地月旋转坐标 系,计算地月L2点标称转移轨道状态转移矩阵;根据状态转移矩阵计算误差随时间的变化 情况;根据状态转移矩阵,建立修正机动与修正时间和轨道误差的函数关系;优化探测器修 正时间,利用该函数关系确定修正速度增量和终端速度增量最优的误差修正点和修正速度 增量;探测器在最优修正点施加速度增量,完成地月L2点转移轨道的轨道修正,并完成地月 L2点轨道转移。 本发明为公开的地月L2点转移轨道最优误差修正点选择方法,包括如下步骤: 步骤一:建立地月旋转坐标系,计算地月L2点标称转移轨道状态转移矩阵。 选择地球-月球系统的质心作为原点建立坐标系,选择X轴为地球与月球连线方 向,由地球指向月球,Z轴为系统旋转的角速度方向,Y轴与X,Z轴垂直构成右手坐标系; 5 CN 111605736 A 说 明 书 2/6 页 探测器在该系统下的动力学方程表示为 其中μ=m2/(m1 m2)表示系统的质量系数,m1为地球的质量,m2为月球的质量, 为探测器与地球的距离, 为探测器 与月球的距离; 定义地月旋转系下的标称转移轨道为Γ,动力学方程(1)表示为矩阵形式 其中 为表示标称轨道位置速度的六维状态变量,在标称转移 轨道附近线性化得 其中 式中U表示系统的伪势能,Uij表示对i,j方向的二阶偏导数,方程的解为δX(t)=Φ (t,t0)δX(t0),其中Φ(t,t0)表示系统从t0至t的状态转移矩阵。通过下式求解 初始状态Φ(0,0)=I6×6为单位矩阵。根据初始状态,标称轨道Γ任意时间t的状态 转移矩阵都通过求解矩阵微分方程得到,简记为Φ(t),状态转移矩阵也表示为分块矩阵形 式 6 CN 111605736 A 说 明 书 3/6 页 其中M,N,L,K均为3×3的矩阵。 步骤二,根据状态转移矩阵计算轨道误差随时间的变化情况。 定义轨道在时刻T0的位置和速度误差为δr0,δv0,对应的标称位置速度状态为r0, v0,则根据状态转移矩阵,在时刻T1真实轨道相对于标称轨道的位置和速度误差为δr1,δv1 同时时刻T1施加修正机动Δv1,则终端时刻T2时真实轨道的终端误差为 步骤三、建立修正机动与修正时间和轨道误差的函数关系。 轨道修正需保证修正后的轨道在终端时刻T2到达位置r2,即δr2=0,从而得M2δr1 N1(δv1 Δv1)=0, 即 根据式(4)有δr1=M1δr0 N1δv0, δv1=L1δr0 K1δv0。得 同时终端速度误差δv2即为所需施加的轨道机动量Δv2 误差修正所需的总速度增量为||Δv1|| ||Δv2||。方程(6)和(7)建立修正机动与 修正时间和轨道误差,即建立修正机动与修正时间和轨道误差的函数关系。 步骤四、根据测量得到的轨道误差,优化误差修正时间,使修正所需的速度增量最 小,得到最优修正点和最优修正时间。 利用步骤三建立的轨道误差与修正时间和速度增量的关系,由测量得到的误差δ r1,δv1,优化误差修正时间T2,使||Δv1|| ||Δv2||最小,由于优化变量只有修正时间一个 变量,采用遍历搜索或梯度优化即可得到最优解 对应的位置即为最优修正点。 步骤五、探测器在最优修正点施加修正机动,完成地月L2点转移轨道的轨道修正, 并完成地月L2点轨道转移。 探测器在最优修正点施加修正机动Δv1,在终端再次施加机动Δv2,实现标称轨道 入轨。若在转移过程中多次测量误差,根据测量值重复步骤四,获得相应的最优修正位置, 直至轨道到达终端位置,完成地月L2点轨道转移。 有益效果: 1、本发明公开的地月L2点转移轨道最优误差修正点选择方法,地月L2点转移轨道 最优误差修正点选择过程中仅需对标称轨道进行计算,无需多次打靶修正,计算量小,计算 效率高,进而提高修正效率。 7 CN 111605736 A 说 明 书 4/6 页 2、本发明公开的地月L2点转移轨道最优误差修正点选择方法,根据状态转移矩阵 建立修正机动与修正时间和轨道误差的函数关系,利用该函数关系确定修正速度增量和终 端速度增量最优的误差修正点,降低修正所需的燃料消耗。 3、本发明公开的地月L2点转移轨道最优误差修正点选择方法,在三体旋转坐标系 下进行修正计算,动力学方程及修正机动与修正时间和轨道误差的函数关系推导中考虑月 球引力对转移轨道误差的影响,提高轨道转移的精度。 附图说明 图1本发明公开的地月L2点转移轨道最优误差修正点选择方法流程示意图。 图2本发明实例中地月L2点标称轨道。 图3本发明实例中轨道误差随时间变化图。 图4本发明实例中考虑误差的地月L2点最优修正轨道。











