
技术摘要:
发明公开了一种智能吊及其系统,涉及吊具技术,包括智能吊装置和用于控制智能吊装置的控制系统,智能吊装置包括固定箱体,固定箱体内固定设有吊索收卷盘和驱动吊索收卷盘转动的驱动装置,吊索收卷盘上卷绕有用于吊装的吊索,吊索上固定设有手柄壳体,手柄壳体的底部固 全部
背景技术:
目前,在制造装配行业,吊具是组装流水生产线上重要的组装装配之一,吊具是一 种牵引装置,用来吊升配重型配件完成组装,例如,在电机装配中,常常要用到吊具将电机 的定子和转子吊装进电机壳体内, 目前,传统的吊具在有效性、精确性和安全性等方面的作用非常有限,而且不能与 人在同一个物理工作空间合作作业。对于大型物件的搬运装配,不仅工人的劳动强度大、效 率低、准确性差,而且有可能会对工人造成伤害。为此,我们提出了一种智能吊及其系统。
技术实现要素:
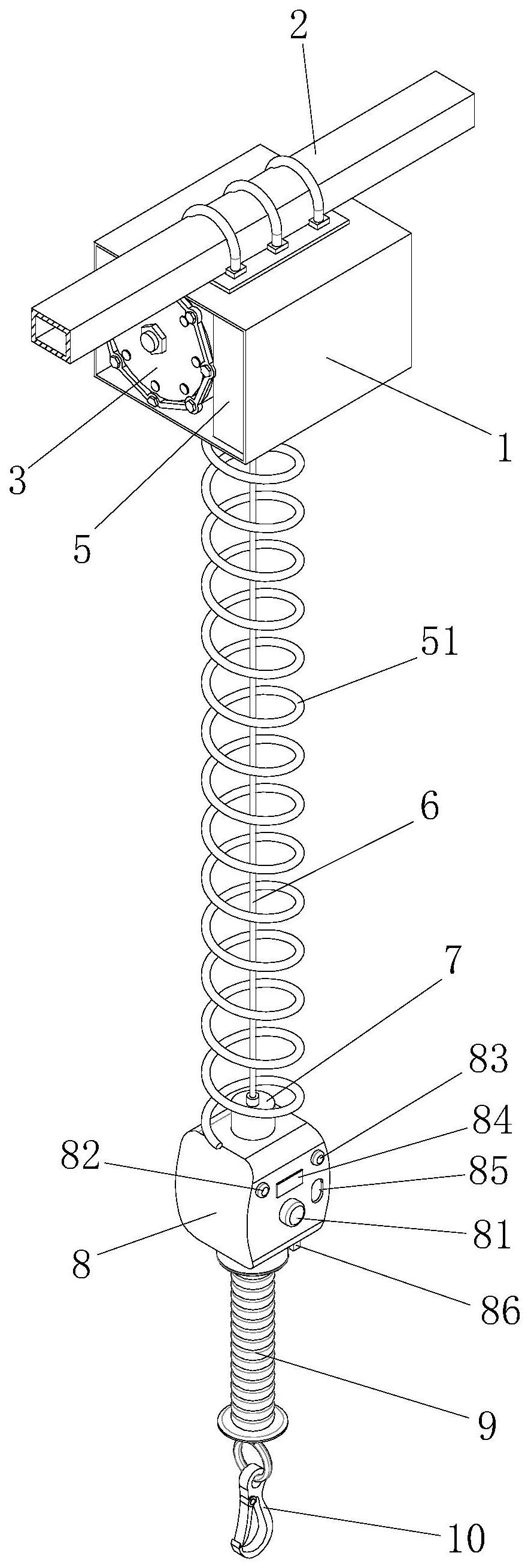
发明的目的是为了解决现有技术中存在的缺点,而提出的一种智能吊及其系统。 为了实现上述目的,发明采用了如下技术方案: 设计一种智能吊及其系统,包括智能吊装置和用于控制所述智能吊装置的控制系 统,所述智能吊装置包括固定箱体,所述固定箱体固定设置在吊架上,所述固定箱体内固定 设有吊索收卷盘和驱动所述吊索收卷盘转动的驱动装置,所述吊索收卷盘上卷绕有用于吊 装的吊索,所述吊索的一端固定在吊索收卷盘上,另一端固定设有手柄壳体,所述手柄壳体 的底部固定设有手柄,所述手柄的下方固定设有吊钩; 所述控制系统包括用于控制驱动装置工作的控制器和总控开关,所述控制器设置 在固定箱体内,所述总控开关设置在手柄壳体上,所述控制器通过数据线连接有第一吊装 操作单元和第二吊装操作单元; 所述第一吊装操作单元包括用于感知手部的光电传感器和感知手柄上下位移的 位移传感器,所述光电传感器和位移传感器通过数据线与控制器进行通信连接; 所述第二吊装操作单元包括用于感知吊钩重力变化的称重传感器和用于超重保 护的超重保护模块,所述称重传感器固定设置在吊索与手柄壳体之间,并通过数据线与控 制器进行通信连接; 所述控制系统还包括用于控制吊钩上下移动的限位模块,所述限位模块包括用于 限定吊钩下上位移的上限位按钮和下限位按钮,所述上限位按钮和下限位按钮与控制器进 行通信连接; 所述控制系统还包括用于智能终端远程操控智能吊装置的远程控制模块和用于 安全操控的权限模块。 进一步的,所述驱动装置为伺服电机,所述伺服电机通过导线与控制器相连。 进一步的,所述手柄内部为中空结构,手柄的轴线上贯穿设有连轴,所述连轴的一 端固定在手柄壳体上,另一端固定在所述吊钩上,所述连轴位于手柄内部的两端套设有复 位弹簧,所述连轴上设有用于固定复位弹簧的限位块,所述复位弹簧的一端固定在限位块 4 CN 111606235 A 说 明 书 2/5 页 上,另一端固定在手柄内腔的端部上。 进一步的,所述光电传感器为红外线传感器,所述光电传感器的探测端设置在手 柄的一侧,并固定设置在手柄壳体的底部。 进一步的,所述位移传感器固定设置在手柄的顶部,位移传感器的探测端对应连 轴的一侧设置。 进一步的,所述固定箱体的底部设有用于吊索穿过的过线管,所述过线管内设有 用于防吊索摆动的夹持收放线装置,所述夹持收放线装置的收放线速度由控制器进行控 制,并保持与吊索收卷盘收放线速度相同。 进一步的,所述夹持收放线装置包括伺服马达、一组夹持轮、第一皮带盘、第二皮 带盘、皮带,所述伺服马达固定在过线管的外侧,并通过导线与控制器相连,一组所述夹持 轮夹持在吊索的两侧,夹持轮通过转轴固定在过线管上,其中一个橡胶夹持轮上固定设有 第一皮带盘,所述伺服马达的输出端上固定设有第二皮带盘,所述第二皮带盘与第一皮带 盘之间通过皮带相连。 进一步的,所述远程控制模块包括无线收发模块,所述无线收发模块与控制器相 连,无线收发模块通过无线网与控制终端进行无线连接,所述控制终端为手持智能终端,所 述手持智能终端内设有远程控制智能吊装置的APP。 进一步的,所述权限模块包括用于识别操作人员指纹信息的指纹识别器,所述指 纹识别器固定设置在手柄壳体上,所述指纹识别器与控制器相连,控制器内设有用于设别 指纹识别器指纹信息的指纹验证模块。 进一步的,所述手柄壳体上设有用于显示称重传感器数值的显示屏。 发明提出的一种智能吊及其系统,有益效果在于: (1)、发明具有两种操作模式,可通过重力增减的方式,实现智能吊的智能升降操 作,也可通过感应手势上下移动的方式,实现智能吊的智能升降操作,同时也可通过智能终 端进行远程操作,操作简单,操作更加方便快捷,有利于提高工作效率。 (2)、发明具有用了指纹识别技术对操作人员的指纹进行识别,只有授权的操作员 才能够对该智能吊进行操作,有利于提高安全性。 附图说明 附图用来提供对发明的进一步理解,并且构成说明书的一部分,与发明的实施例 一起用于解释发明,并不构成对发明的限制。在附图中: 图1是发明的立体结构示意图; 图2是发明的侧视图; 图3是发明中关于手柄的内部结构示意图; 图4是图2中关于点A的放大示意图; 图5是发明的系统框体。 图中标记为:固定箱体1、过线管11、吊架2、吊索收卷盘3、驱动装置4、控制器5、数 据线51、吊索6、称重传感器7、手柄壳体8、总控开关81、上限位按钮82、下限位按钮 83、显示 屏84、指纹识别器85、光电传感器86、位移传感器87、手柄9、连轴91、复位弹簧92、限位块93、 吊钩10、伺服马达101、橡胶夹持轮102、第一皮带盘103、第二皮带盘 104、皮带105。 5 CN 111606235 A 说 明 书 3/5 页











