
技术摘要:
本发明公开了一种多功能电路板焊接机器人,包括装板,所述安装板的上端对称固定连接有两个支撑板,两个所述支撑板的上端共同固定连接有顶板,所述顶板的下端固定连接有过滤箱,其中一个所述安装板的一侧安装有吸风机,所述吸风机的吸风端连通有第一支管和第二支管,所 全部
背景技术:
电路板使电路迷你化、直观化,对于固定电路的批量生产和优化用电器布局起重 要作用,电路板可称为印刷线路板或印刷电路板,在电路板的加工过程中,我们需要对电路 板进行焊接,而电路板的焊接过程是在电路板焊接架上完成的; 对于现在的电路板焊接来说,在实际的使用过程中,需要使用到夹持的限位机构 来对电路板进行限位,然后进行焊接加工,但是由于电路板较为精密,容易损坏,所以采用 一般的限位夹持机构容易损坏电路板,而进行焊接时,且一般的限位夹持机构,取出也不方 便。
技术实现要素:
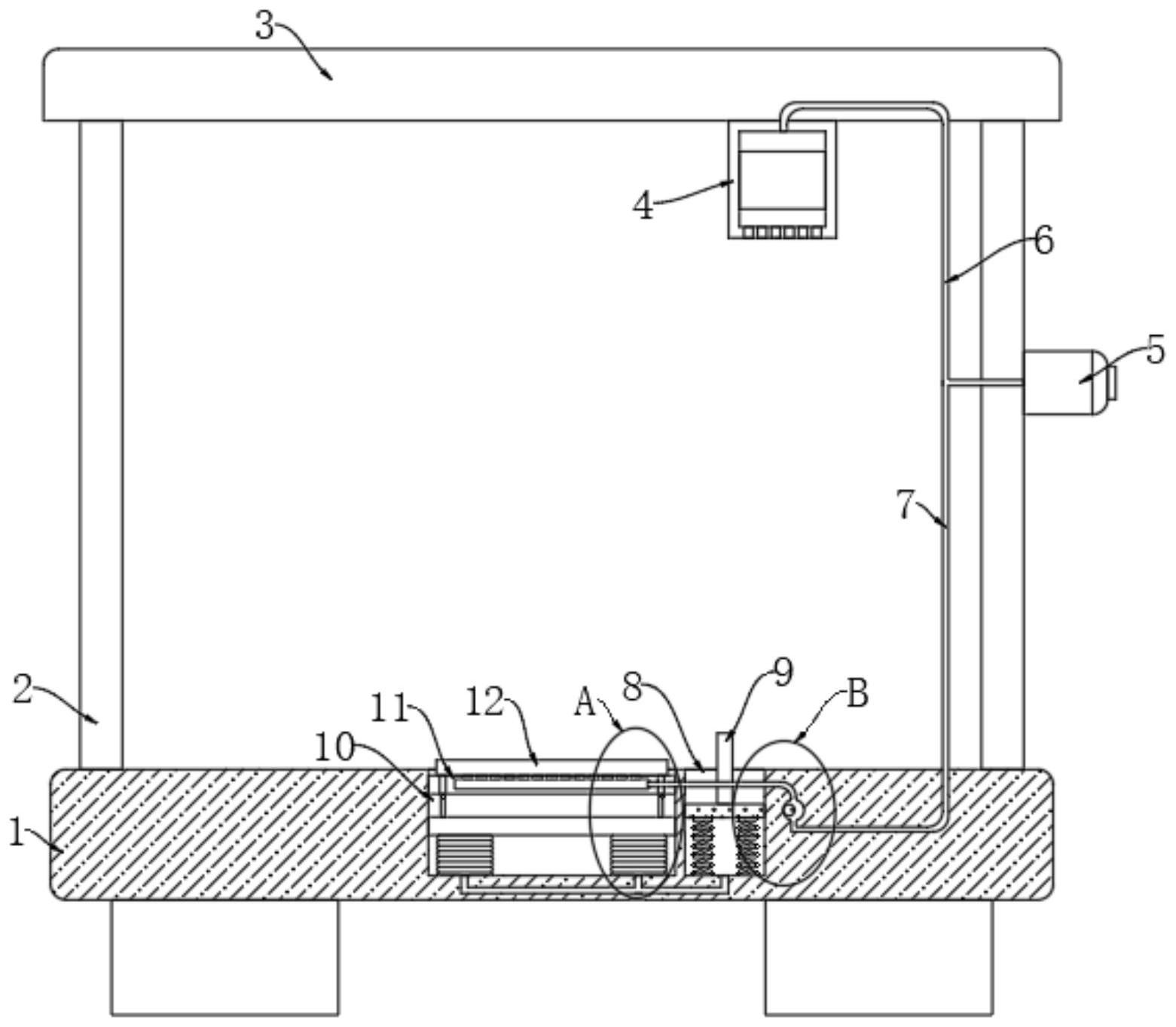
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种多功能电路板焊 接机器人,该焊接机器人将除味与限位相结合,通过负压进行限位,不会损伤到电路板,同 时还设有顶出机构,可以很轻松的在焊接后取出电路板,加快总体的工作效率。 为了实现上述目的,本发明采用了如下技术方案: 一种多功能电路板焊接机器人,包括安装板,所述安装板的上端对称固定连接有 两个支撑板,两个所述支撑板的上端共同固定连接有顶板,所述顶板的下端固定连接有过 滤箱,其中一个所述安装板的一侧安装有吸风机,所述吸风机的吸风端连通有第一支管和 第二支管,所述第一支管远离吸风机的一端与过滤箱的出风端连通,所述安装板的上端设 有安装槽内滑槽,所述滑槽位于安装槽的右侧,所述安装槽内设有放置机构,所述安装板内 设有球状腔,所述滑槽内设有开闭球状腔的开闭机构。 优选地,所述安装板的下端固定连接有多个支撑块。 优选地,所述放置机构包括设置在安装槽内的固定板,所述固定板与安装槽的内 壁固定连接,所述固定板的上端放置有电路板本体,所述固定板内设有负压腔,所述负压腔 的内顶部设有多个连接孔,所述球状腔的下端与第二支管远离吸风机的一端连通,所述球 状腔的上端通过连通管与负压腔连通。 优选地,所述开闭机构包括设置在滑槽内的磁性滑板,所述磁性滑板上端固定连 接有按压杆,所述按压杆的上端贯穿滑槽的槽口,所述磁性滑板的下端通过多个连接弹簧 与滑槽的内底部弹性连接,所述球状腔内设有与磁性滑板相配合的磁球,所述安装槽内设 有与磁性滑板相配合的顶出机构。 优选地,所述顶出机构包括滑动连接在安装槽内的滑动板,所述滑动板的下端通 过两个伸缩气囊与安装槽的内底部连接,两个所述伸缩气囊分别通过两个连接管与滑槽位 于磁性滑板下方空间连通,所述滑动板上端对称设有两个抵条,所述固定板上贯穿设有两 个与抵条相配合的开口。 3 CN 111570965 A 说 明 书 2/3 页 优选地,两个所述抵条均为橡胶材质。 本发明与现有技术相比,其有益效果为: 1、将电路板本体放置在固定板的上端,这时启动吸风机,吸风机的吸风口通过第 一支管进行吸风,通过第一支管和过滤箱的配合,可以将焊接是产生的气味进行过滤,与此 同时,由于球状腔内处于导通状态,且第一支管和吸风机的吸风口有气体的流动,则根据伯 努利原理可知,气体的流速大,压强小,贼受气压的作用,负压腔内的气体会通过连通管和 第二支管压入到吸风机内,这时的负压腔内处于负压的状态,将电路板本体紧紧的束缚在 固定板上,便于之后的焊接加工,通过负压进行限位,不会损伤到电路板。 2、当焊接结束后,此时按下按压杆,按压杆会带动磁性滑板下移,当磁性滑板下移 到远离磁球时,磁球受到重力作用堵住球状腔的下端通口,此时的负压腔由于与电路板本 体之间存在少许的间隙,所以通过间隙,负压腔会慢慢恢复常压的状态,而在磁性滑板下移 时,会将滑腔内的空气压入到伸缩气囊中,伸缩气囊充气扩展,并带动滑动板上移,滑动板 上的抵条会穿过开口并将电路板本体顶起,便于取出电路板本体,可以很轻松的在焊接后 取出电路板,加快总体的工作效率。 附图说明 图1为本发明提出的一种多功能电路板焊接机器人的结构示意图; 图2为图1的A处放大图; 图3为图1的B处放大图。 图中:1安装板、2支撑板、3顶板、4过滤箱、5吸风机、6第一支管、7第二支管、8滑槽、 9按压杆、10安装槽、11固定板、12电路板本体、13负压腔、14连接孔、15开口、16抵条、17滑动 板、18伸缩气囊、19连接管、20磁性滑板、21连接弹簧、22球状腔、23磁球、24连通管。











