
技术摘要:
本发明涉及一种空间人造目标混合像元非线性丰度确定方法及系统,包括:构建深度神经网络,包括编码器和解码器,编码器包括输入层、三个隐含层和丰度输出层,解码器为加权组合非线性混合模型,将训练光谱矩阵输入编码器输出丰度矩阵,根据丰度矩阵利用加权组合非线性混 全部
背景技术:
随着全球太空资源的开发,大量的卫星、空间碎片等空间人造目标进入地球外层 空间,有效的识别空间目标具有极高的价值,它不仅可以确定目标的类型属性,还可以对潜 在的碰撞攻击等进行预警。 大型雷达、光学望远镜被用于空间目标监视,但当目标很小或位于中高轨时,雷达 则无能为力,光学成像也只能看到有限的几个像元,所提供的信息无法判断目标的材质组 成。而实验表明,由空间目标表面材料系数和太阳光谱卷积形成的光谱曲线可以确定目标 表面材料的组成,且不同卫星平台的光谱存在显著差异,可以利用光谱对卫星进行分类,因 此现在采用光谱技术进行空间目标识别。 由于空间目标表面材料组成的复杂多样性,由光谱仪获得的光谱数据通常是多个 材料光谱的混合光谱,而非单一物质所对应的光谱,被称为混合像元。混合像元的解混是空 间目标识别中一个很重要的部分,其以混合光谱为目标,探究其组成材料及其对应的比例。 混合像元空间目标的解混主要分为两步,端元提取是将混合像元分解为一系列纯物质光谱 (端元),即获得空间目标组成材料的光谱数据;而丰度估计则是求出这些纯物质所占的比 例(丰度),即各材料的占比。 光谱的解混技术首先需要建立光谱的混合模型,目前光谱混合模型有线性混合模 型和非线性混合模型两种。线性光谱混合模型(linear spectral mixing model,LSMM)是 指入射光只与一种物质表面发生作用,忽略了物体之间的相互作用,传感器获得的光谱是 每种物质光谱的线性叠加。非线性光谱混合模型(nonlinear spectral mixing model, NLSMM)则是考虑了光子在多种物质之间的散射作用,传感器获得的光谱不再是多种物质简 单的线性叠加,还出现了乘积项导致非线性混合。 现阶段大量丰度确定方法的研究是基于线性混合模型假设前提,即方法的研究主 要考虑混合物样本的光谱响应信号,光谱响应信号为构成混合物的各个端元的光谱响应的 线性叠加;而非线性混合模型不再是简单的线性叠加,具有实际物理意义。因此,本领域亟 需一种非线性混合像元丰度确定方法,以解决现有技术中的不足之处。
技术实现要素:
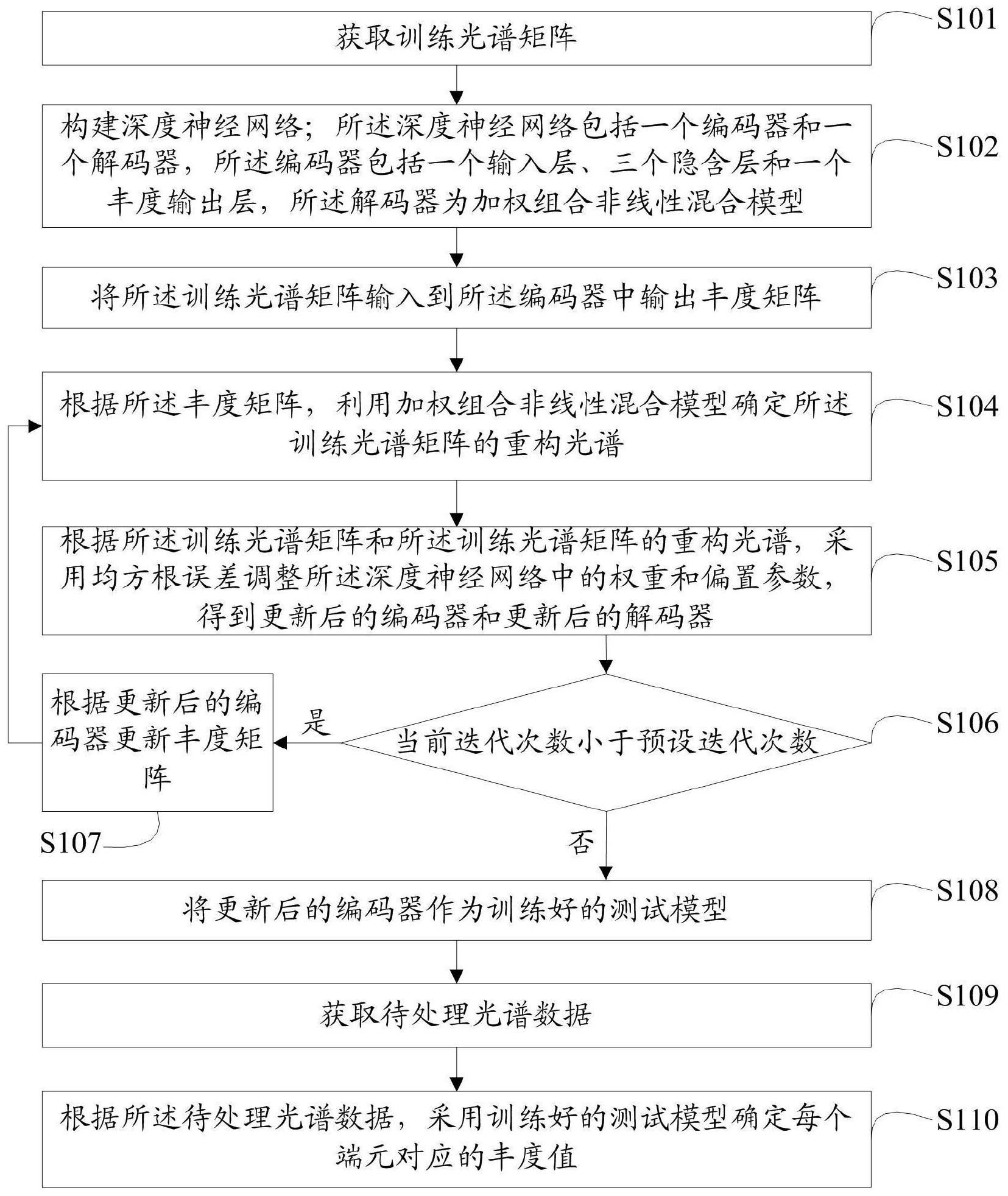
本发明的目的是提供一种空间人造目标混合像元非线性丰度确定方法及系统,以 实现对线性和非线性混合模型中的混合像元丰度确定。 为实现上述目的,本发明提供了如下方案: 一种空间人造目标混合像元非线性丰度确定方法,所述空间人造目标混合像元非 线性丰度确定方法包括: 5 CN 111581879 A 说 明 书 2/8 页 获取训练光谱矩阵; 构建深度神经网络;所述深度神经网络包括一个编码器和一个解码器,所述编码 器包括一个输入层、三个隐含层和一个丰度输出层,所述解码器为加权组合非线性混合模 型; 将所述训练光谱矩阵输入到所述编码器中输出丰度矩阵; 根据所述丰度矩阵,利用加权组合非线性混合模型确定所述训练光谱矩阵的重构 光谱; 根据所述训练光谱矩阵和所述重构光谱,采用均方根误差调整所述深度神经网络 中的权重和偏置参数,得到更新后的编码器和更新后的解码器; 判断当前迭代次数是否小于预设迭代次数,获得判断结果; 若所述判断结果表示当前迭代次数小于预设迭代次数,根据更新后的编码器更新 丰度矩阵,返回“根据所述丰度矩阵,利用加权组合非线性混合模型确定所述训练光谱矩阵 的重构光谱”步骤; 若所述判断结果表示当前迭代次数大于或等于预设迭代次数,将更新后的编码器 作为训练好的测试模型; 获取待处理光谱数据; 根据所述待处理光谱数据,采用训练好的测试模型确定每个端元对应的丰度值。 可选的,所述获取待处理光谱数据,具体包括: 利用光谱设备采集空间目标的光谱数据,获取待处理光谱数据。 可选的,所述根据所述丰度矩阵,利用加权组合非线性混合模型确定所述训练光 谱矩阵的重构光谱,具体包括: 根据公式 确定第一重构光谱; 根据公式r2=Mapre确定第二重构光谱; 根据公式r3=(Mapre)ζ确定第三重构光谱; 根据公式r=w61r1 w62r2 w63r3确定第四重构光谱,所述第四重构光谱为训练光谱 矩阵的重构光谱; 其中,r1表示第一重构光谱,r2表示第二重构光谱,r3表示第三重构光谱,r表示训 练光谱矩阵的重构光谱,(Mi ⊙ Mj)表示端元间的Hadamard乘积,M表示端元光谱,R表示端元 数目,i=1,2,…,R-1,j=2,3,…,R,apre表示丰度矩阵, 表示端元Mi对应的丰度值, 表示端元Mj对应的丰度值,ζ表示指数系数,w61表示第一重构光谱所占的权重,w62表 示第二重构光谱所占的权重,w63表示第三重构光谱所占的权重。 可选的,所述根据所述训练光谱矩阵和所述重构光谱,采用均方根误差调整所述 深度神经网络中的权重和偏置参数,得到更新后的编码器和更新后的解码器,具体包括: 根据公式W,b=argmin(L2Loss(r,r0))调整所述深度神经网络中的权重和偏置参 数,得到更新后的编码器和更新后的解码器; 其中,W表示深度神经网络的权重,b表示深度神经网络的偏置,r表示训练光谱矩 6 CN 111581879 A 说 明 书 3/8 页 阵的重构光谱,r0表示训练光谱矩阵。 一种空间人造目标混合像元非线性丰度确定系统,所述空间人造目标混合像元非 线性丰度确定系统包括: 训练光谱矩阵获取模块,用于获取训练光谱矩阵; 深度神经网络构建模块,用于构建深度神经网络;所述深度神经网络包括一个编 码器和一个解码器,所述编码器包括一个输入层、三个隐含层和一个丰度输出层,所述解码 器为加权组合非线性混合模型; 丰度矩阵输出模块,用于将所述训练光谱矩阵输入到所述编码器中输出丰度矩 阵; 重构光谱确定模块,用于根据所述丰度矩阵,利用加权组合非线性混合模型确定 所述训练光谱矩阵的重构光谱; 更新模块,用于根据所述训练光谱矩阵和所述重构光谱,采用均方根误差调整所 述深度神经网络中的权重和偏置参数,得到更新后的编码器和更新后的解码器; 判断模块,用于判断当前迭代次数是否小于预设迭代次数,获得判断结果; 返回模块,用于若所述判断结果表示当前迭代次数小于预设迭代次数,根据更新 后的编码器更新丰度矩阵,返回重构光谱确定模块; 训练好的测试模型确定模块,用于若所述判断结果表示当前迭代次数大于或等于 预设迭代次数,将更新后的编码器作为训练好的测试模型; 待处理光谱数据获取模块,用于获取待处理光谱数据; 丰度值确定模块,用于根据所述待处理光谱数据,采用训练好的测试模型确定每 个端元对应的丰度值。 可选的,所述待处理光谱数据获取模块具体包括: 待处理光谱数据获取单元,用于利用光谱设备采集空间目标的光谱数据,获取待 处理光谱数据。 可选的,所述重构光谱确定模块具体包括: 第一重构光谱确定单元,用于根据公式 确定第一重构光谱; 第二重构光谱确定单元,用于根据公式r2=Mapre确定第二重构光谱; 第三重构光谱确定单元,用于根据公式r3=(Mapre)ζ确定第三重构光谱; 第四重构光谱确定单元,用于根据公式r=w61r1 w62r2 w63r3确定第四重构光谱,所 述第四重构光谱为训练光谱矩阵的重构光谱; 其中,r1表示第一重构光谱,r2表示第二重构光谱,r3表示第三重构光谱,r表示训 练光谱矩阵的重构光谱,(Mi ⊙ Mj)表示端元间的Hadamard乘积,M表示端元光谱,R表示端元 数目,i=1,2,…,R-1,j=2,3,…,R,apre表示丰度矩阵, 表示端元Mi对应的丰度值, 表示端元Mj对应的丰度值,ζ表示指数系数,w61表示第一重构光谱所占的权重,w62表 示第二重构光谱所占的权重,w63表示第三重构光谱所占的权重。 可选的,所述更新模块具体包括: 7 CN 111581879 A 说 明 书 4/8 页 更新单元,用于根据公式W,b=argmin(L2Loss(r,r0))调整所述深度神经网络中 的权重和偏置参数,得到更新后的编码器和更新后的解码器; 其中,W表示深度神经网络的权重,b表示深度神经网络的偏置,r表示训练光谱矩 阵的重构光谱,r0表示训练光谱矩阵。 根据本发明提供的具体实施例,本发明公开了以下技术效果: 1、本发明针对非线性混合模型,提出了一种空间人造目标混合像元非线性丰度确 定方法及系统,采用无监督学习的方法,利用加权组合非线性模型对混合像元进行处理,确 定出各端元的丰度值,即各材料的占比,比传统方法获得的丰度更准确,提高了混合像元丰 度确定的精度。 2、利用加权组合非线性模型有效克服了线性解混的局限性,加权组合非线性模型 为多种混合模型的加权组合形式,能适应更多的应用场景。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所 需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施 例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图 获得其他的附图。 图1为本发明所提供的一种空间人造目标混合像元非线性丰度确定方法的流程 图; 图2为本发明所提供的实测空间目标三种表面材料的光谱图; 图3为本发明所提供的信噪比为50dB的1000个混合像元的光谱反射曲线图; 图4为本发明所提供的一种空间人造目标混合像元非线性丰度确定系统的结构示 意图。











