
技术摘要:
本发明涉及一种单电机输入的三自由度转动机构,包括底座、传动换向机构和载物台;传动换向机构为:动力输入轴与第一传动轴经第一离合器连接,第一传动轴与第一传动蜗杆同步传动连接,第一传动蜗杆与平蜗轮盘啮合;第二传动轴与动力输入轴经啮合锥齿轮连接;第二传动蜗 全部
背景技术:
水下航行器航行过程中,会产生偏航、俯仰及横滚三个方向的旋转角度,且绝大部 分情况下,旋转角度不超过60°。为了对测量这三个方向旋转角度的传感器进行性能检测, 常使用手动摇臂式的三维转台,通过三个摇臂独立控制三个方向的旋转,且每次只使一个 方向转动。但是,手动方式调节费事费力,并且转动速度慢,无法满足测试所要求的转动角 速度条件。
技术实现要素:
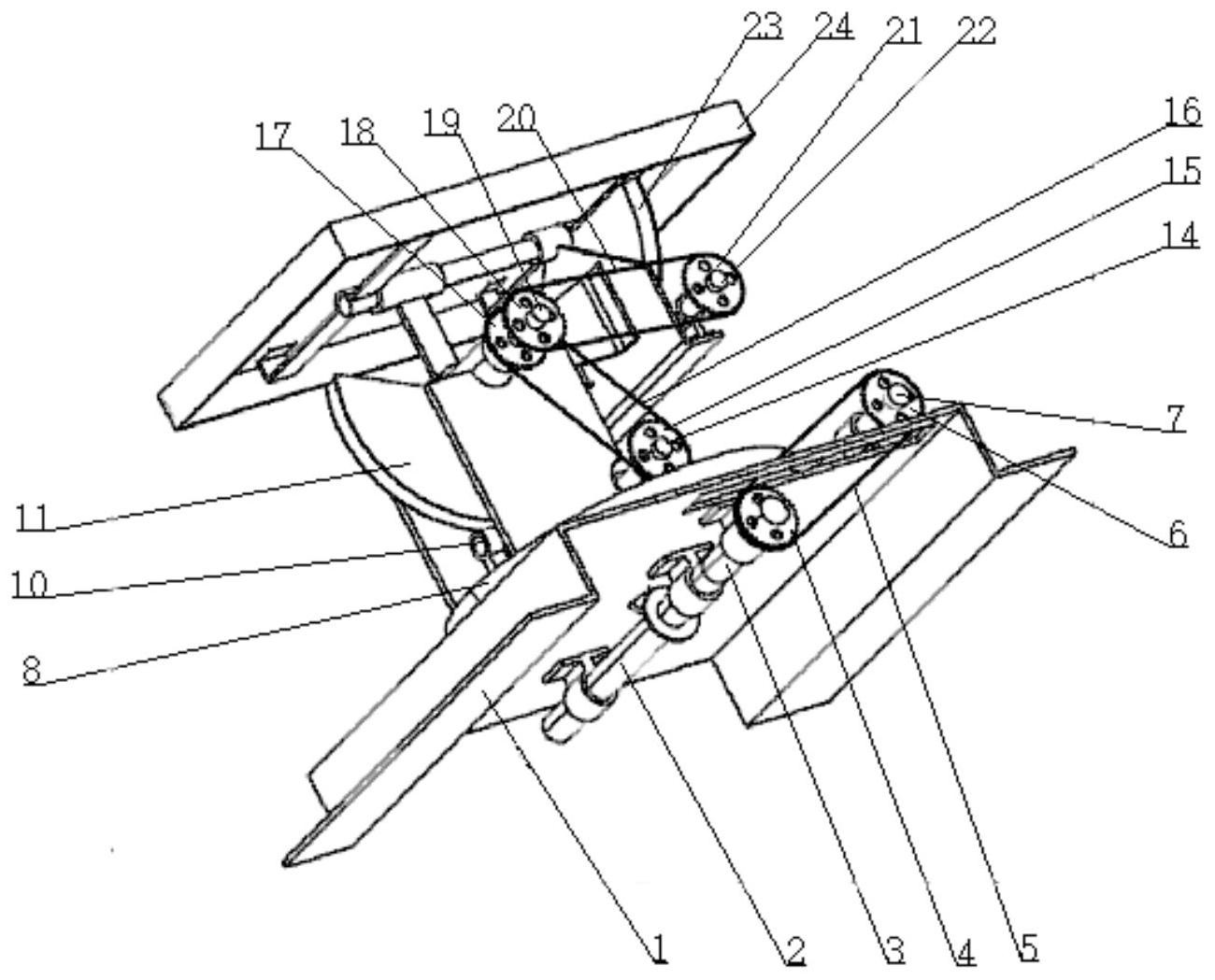
本发明的目的在于克服现有技术的不足之处,提供一种结构紧凑、节省人力操作、 可实现偏航、俯仰及横滚三个方向独立旋转的单电机输入的三自由度转动机构。 本发明的上述目的通过如下技术方案来实现: 一种单电机输入的三自由度转动机构,包括底座、传动换向机构和载物台; 所述传动换向机构包括动力输入轴、第一传动轴、第一传动蜗杆、平蜗轮盘、第二 传动轴、第二传动蜗杆、立蜗轮盘、第三传动轴、第四传动轴、第三传动蜗杆和侧蜗轮盘; 所述动力输入轴连接动力源,所述动力输入轴和第一传动轴通过各自轴座可转动 式安装在底座下方,动力输入轴与第一传动轴通过第一离合器连接,第一传动轴的端部安 装有第一带轮;所述平蜗轮盘通过回转支承安装在底座上方,所述第一传动蜗杆通过与底 座上端连接的轴座可转动式安装在底座上方,第一传动蜗杆与平蜗轮盘啮合,第一传动蜗 杆的端部安装有第二带轮,第二带轮和第一带轮之间通过第一同步带连接; 所述第二传动轴为立轴,第二传动轴垂直穿装在底座上,第二传动轴的下端部与 动力输入轴通过一对相啮合的锥齿轮传动连接;所述第二传动蜗杆通过与平蜗轮盘上端连 接的轴座安装在平蜗轮盘的上方,第二传动蜗杆与第二传动轴的上端部之间通过第一锥状 离合器连接;所述立蜗轮盘支撑在蜗轮盘支架上,蜗轮盘支架由固定在平蜗轮盘上的两立 板及通过轴承支撑在两立板上端的轴套构成,立蜗轮盘的中心部与轴套同轴固定连接,立 蜗轮盘与第二传动蜗杆啮合; 所述第三传动轴通过与平蜗轮盘上端连接的轴座可转动式支撑在平蜗轮盘的上 方,第三传动轴与第二传动轴的上端部通过第二锥状离合器连接,在第三传动轴上安装有 第三带轮;所述第四传动轴可转动式安装在所述轴套内,在第四传动轴上安装有第四带轮 和第五带轮;所述第三传动蜗杆安装在蜗杆支架上、且在第三传动蜗杆上安装有第六带轮, 所述蜗杆支架与所述轴套固定连接,在蜗杆支架远离与轴套连接的外侧设置有蜗杆安装平 台,第三传动蜗杆通过轴座安装在蜗杆安装平台上方;所述侧蜗轮盘固定在载物台托架的 一端,所述载物台托架与载物台的下端固定连接、且与蜗杆支架的上端部通过轴套与轴孔 3 CN 111546304 A 说 明 书 2/4 页 配合结构可转动式连接;所述第三带轮与所述第四带轮通过第二同步带连接,所述第五带 轮与所述第六带轮通过第三同步带连接,所述第三传动蜗杆与侧蜗轮盘啮合; 在平蜗轮盘、立蜗轮盘和侧蜗轮盘上各安装有一角编码器。 进一步的:所述蜗杆支架由固定架、两连接板及侧板构成;固定架为立架结构,固 定架的下端与所述轴套焊连,固定架的上端设置有第一轴安装孔;侧板采用L型弯板结构, 侧板的横边形成蜗杆安装平台,侧板的上端焊接有带第二轴安装孔的上端头,第二轴安装 孔和第一轴安装孔呈水平同轴设置;所述两连接板的一端与所述轴套焊接固定,另一端与 侧板的竖边固定连接;所述载物台托架由转轴及与转轴两端固定的托板构成,转轴可转动 式穿装在所述第一轴安装孔内和第二轴安装孔内,两端托板与载物台下端固定连接;所述 侧蜗轮盘与远离轴套一端的托板的下端固定连接。 进一步的:所述立蜗轮盘和侧蜗轮盘均为半蜗盘结构。 本发明具有的优点和积极效果: 本发明采用了单一动力源,由动力输入轴输入动力,通过几个离合器的离合状态 组合,可形成三条传动链,分别可实现载物台的偏航旋转,载物台的横滚旋转及载物台的俯 仰旋转;在平蜗轮盘、立蜗轮盘和侧蜗轮盘上各安装有一角编码器,可准确测得三个方向的 旋转角度。 本发明的各传动部件之间位置布置合理、结构紧凑、占用空间小。在对传感器进行 性能检测时,只需切换几个离合器的离合状态即可,节省了人力操作,能满足测试所要求的 转动角速度条件。 附图说明 图1是本发明的立体结构示意图1; 图2是本发明的立体结构示意图2; 图3是本发明的立体结构示意图3(去掉载物台)。











