
技术摘要:
本发明公开了一种用于内镜的操作手柄,包括,手柄主体;弯曲调节组件,包括手轮、主轴以及传动带,主轴可旋转地安装于手柄主体,手轮安装于主轴,传动带的中间部位绕合于主轴,传动带的两端适于安装于蛇骨的两侧,手轮能够带动主轴转动,以带动传动带的两端相对运动, 全部
背景技术:
内镜是一种可以经人体的口腔等自然腔道进入体内,方便观察和诊治的检测仪 器。通常包括插头、手柄操作部以及插入部等,其中手柄操作部的一个重要作用是控制插入 部蛇骨的弯曲角度,通过插入部顶端的微型摄像头引导内镜插入腔道,进行观察和诊治。 现有的内镜是通过转动手柄操作部上的手轮来控制蛇骨弯曲的,在蛇骨弯曲接近 目标位置时,通过锁紧装置增加零件间的摩擦力来保持手轮不发生转动。但是,在手轮转动 的过程中以及手轮锁定时,无法精确识别蛇骨的弯曲角度和弯曲方向,从而无法满足某些 观察和诊治对插入部顶端有精确定位的需求,用户体验感差。其次,现有的锁紧装置并没有 真正锁定蛇骨的角度,只是在手轮完全不受旋转力矩的情况下,蛇骨的弯曲角度保持不变。 因此,一旦误触碰手轮,就会改变蛇骨弯曲角度,进而给内镜下某些对顶端定位要求高的治 疗带来安全风险。 综上所述,需要对传统内镜用的操作手柄进行改进。
技术实现要素:
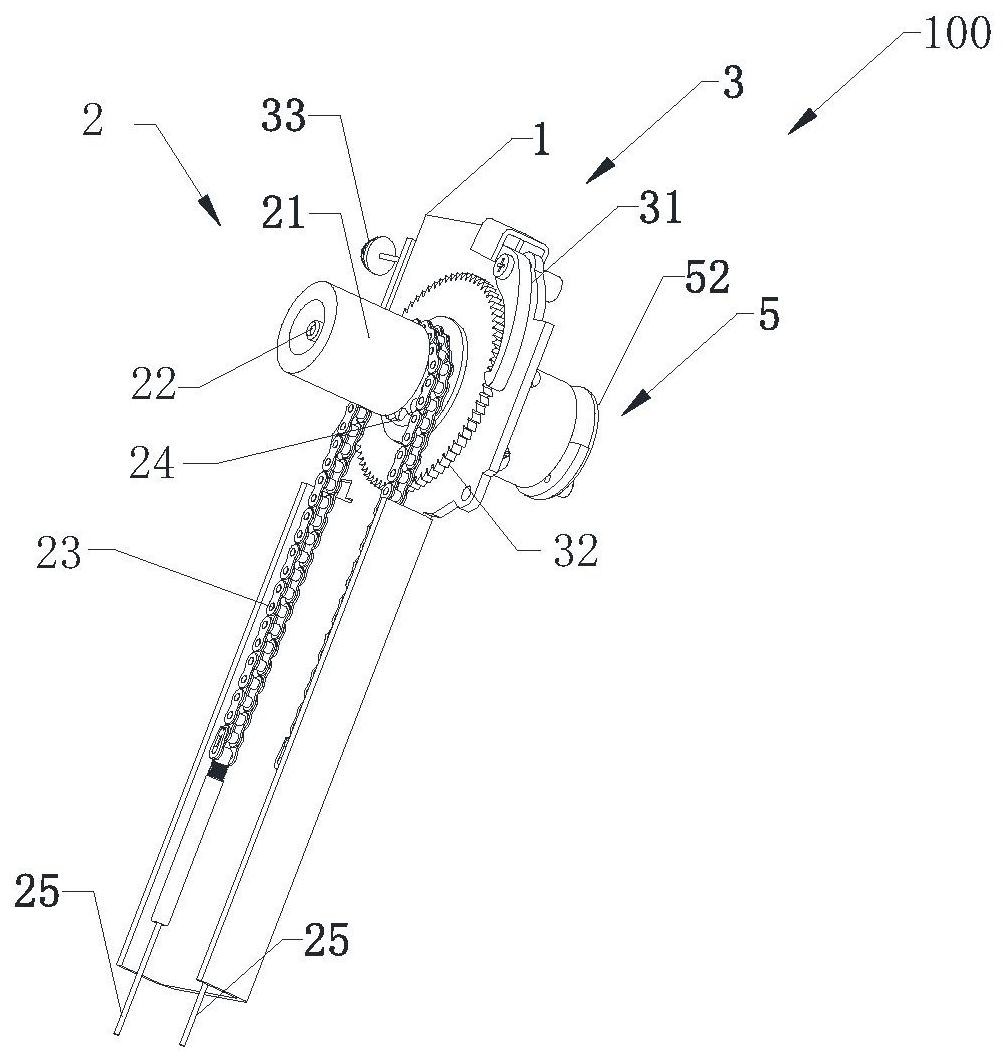
为了解决上述技术问题,本发明的目的在于提供一种用于内镜的操作手柄,其通 过棘轮和棘爪组件的配合确保手轮无法回转,以保证内镜的蛇骨的弯曲角度固定,能够提 高内镜使用过程中的稳定性和安全性。 为了实现上述目的,本发明提供一种用于内镜的操作手柄,用于控制内镜蛇骨的 弯曲,包括: 手柄主体; 弯曲调节组件,包括手轮、主轴以及传动带,所述主轴可旋转地安装于所述手柄主 体,所述手轮安装于所述主轴,所述传动带的中间部位绕合于所述主轴,所述传动带的两端 适于分别安装于所述蛇骨的两侧,所述手轮能够带动所述主轴转动,以带动所述传动带的 两端相对运动,进而控制所述蛇骨的弯曲; 制动组件,包括棘爪和棘轮,所述棘爪安装于所述手柄主体,所述棘轮安装于所述 主轴,所述主轴能够带动所述棘轮同步转动; 其中所述制动组件具有一个制动状态和一个非制动状态,在所述制动状态,所述 棘爪和所述棘轮相咬合,所述手轮不能够带动所述主轴沿预设方向转动;在所述非制动状 态,所述棘爪和所述棘轮相分离,所述手轮能够带动所述主轴沿所述预设方向转动。 在本发明的一些优选实施例中,所述用于内镜的操作手柄进一步包括一个限位 板,所述限位板安装于所述手柄主体,具有相互间隔的第一限位槽和第二限位槽,以及具有 连通所述第一限位槽和所述第二限位槽的活动通道;所述制动组件进一步包括控制杆,所 述控制杆的固定端安装于所述棘爪,所述控制杆的活动端可活动地安装于所述限位板,并 4 CN 111588334 A 说 明 书 2/7 页 能够通过所述活动通道在所述第一限位槽和所述第二限位槽切换,以使所述制动组件在所 述制动状态和所述非制动状态之间切换。 在本发明的一些优选实施例中,所述第二限位槽的高度高于所述第一限位槽的高 度,当所述控制杆移动至所述第一限位槽内时,所述制动组件切换至所述非制动状态;当所 述控制杆移动至所述第二限位槽内时,所述制动组件切换至所述制动状态。 在本发明的一些优选实施例中,所述棘爪包括棘爪主体和分别位于所述棘爪主体 两端的固定部和咬合部,所述棘爪的所述固定部连接于所述控制杆的所述固定端,所述棘 爪的所述固定部和所述控制杆的所述固定端可相对于所述手柄主体转动地安装于所述手 柄主体。 在本发明的一些优选实施例中,所述棘爪的所述棘爪主体是刚性体。 在本发明的一些优选实施例中,所述棘爪的所述棘爪主体具有与所述棘轮相适配 的弧度。 在本发明的一些优选实施例中,所述弯曲调节组件还包括安装于所述主轴的传动 轮,所述传动轮能够随着所述主轴转动,所述传动带安装于所述传动轮,所述传动轮能够带 动所述传动带运动。 在本发明的一些优选实施例中,所述传动轮是齿轮,所述传动带是与所述齿轮相 适配的链条。 在本发明的一些优选实施例中,所述用于内镜的操作手柄进一步包括弯曲检测组 件,所述弯曲检测组件安装于所述手柄主体,用于检测所述主轴的转动状态,以确定所述蛇 骨的弯曲状态。 在本发明的一些优选实施例中,所述弯曲检测组件包括磁性件和旋转角度传感 器,所述磁性件安装于所述主轴远离所述手轮的一端,并能够随着所述主轴转动;所述旋转 角度传感器安装于所述手柄主体,并且与所述磁性组件的位置相对应,所述旋转角度传感 器能够根据所检测的磁场的强弱确定所述主轴的转动角度。 本发明方案包括以下至少一项有益效果: 1、本发明所述的用于内镜的操作手柄利用棘爪和棘轮的相互配合,确保手轮和主 轴无法往回转动,进而保持被连接于所述链传动组件的所述蛇骨的弯曲角度,并且具有一 定刚度所述棘爪的棘爪主体能确保在误触碰所述手轮的情况下,所述手轮也不会转动,从 而提高了在所述内镜下治疗的安全性。 2、在本发明的所述的用于内镜的操作手柄的部分实施例中,所述手轮控制所述蛇 骨进行弯曲工作,同时,所述手轮带动所述主轴和被固定于所述主轴的所述磁性件同时旋 转。被固定于所述底板的所述旋转角度传感器通过检测所述磁性件旋转后的磁场强弱分布 情况来计算所述手轮旋转的圈数和角度,进而确定所述蛇骨的弯曲角度,再将数据传输到 后端的显示器进行显示,从而实现对所述内镜的插入部顶端的位置的控制。 附图说明 下面将以明确易懂的方式,结合附图说明优选实施方式,对本发明方案、技术特 征、优点及其实现方式予以进一步说明。 图1是本发明一个优选实施例的用于内镜的操作手柄的结构的立体图; 5 CN 111588334 A 说 明 书 3/7 页 图2是本发明上述优选实施例的用于内镜的操作手柄的结构的正视图; 图3是本发明的上述优选实施例的用于内镜的操作手柄的局部放大图; 图4是本发明上述优选实施例的用于内镜的操作手柄的结构的俯视图; 图5是本发明上述优选实施例的用于内镜的操作手柄的结构的侧视图; 图6是本发明上述优选实施例的用于内镜的操作手柄的制动组件的结构图,其示 出了所述制动组件的棘爪和棘轮分离的状态; 图7是本发明上述优选实施例的用于内镜的操作手柄的制动组件的结构图,其示 出了所述制动组件的棘爪和棘轮咬合的状态; 图8是本发明上述优选实施例的用于内镜的操作手柄的弯曲角度检测组件的结构 图; 图9是本发明上述优选实施例的用于内镜的操作手柄的弯曲角度检测组件的剖视 图; 图10是本发明上述优选实施例的用于内镜的操作手柄被应用于蛇骨的结构图。 附图标号说明:100用于内镜的操作手柄,200蛇骨,1手柄主体,2弯曲调节组件,3 制动组件,4限位板,5弯曲检测组件,10安装通道,21手轮,22主轴,23传动带,24传动轮,25 连接绳,26旋转轴承,31棘爪,32棘轮,33控制杆,41第一限位槽,42第二限位槽,43活动通 道,51磁性件,52旋转角度传感器,220安装槽,311棘爪主体,312固定部,313咬合部,321棘 轮主体,322棘齿,331固定端,332活动端,3131第二咬合面,3132第二推动面,3221第一咬合 面,3222第一推动面。











