
技术摘要:
本发明提供了一种低功耗高集成高可靠空间黏附装置,该装置包含:连接组件,用于与主动平台对接;用于缓和装置对目标的法向撞击的缓冲机构,与所述连接组件连接;承力结构,与所述缓冲机构连接;前端电机驱动机构,与所述缓冲机构连接,并与所述末端传动机构接触;用于 全部
背景技术:
近年来,随着航天器使用数量的增加,开展航天器在轨维护、在轨操控、失效卫星 回收、中大型空间碎片受控陨落等任务已经或将要成为研究热点。传统的空间目标捕获方 式主要有机械臂抓取、网捕等。使用以上手段,有其局限性,尤其要求目标体积不过大,然而 失效卫星、中大型空间碎片等航天器或其残骸体积往往较大,故传统执行器对此目标不适 合。
技术实现要素:
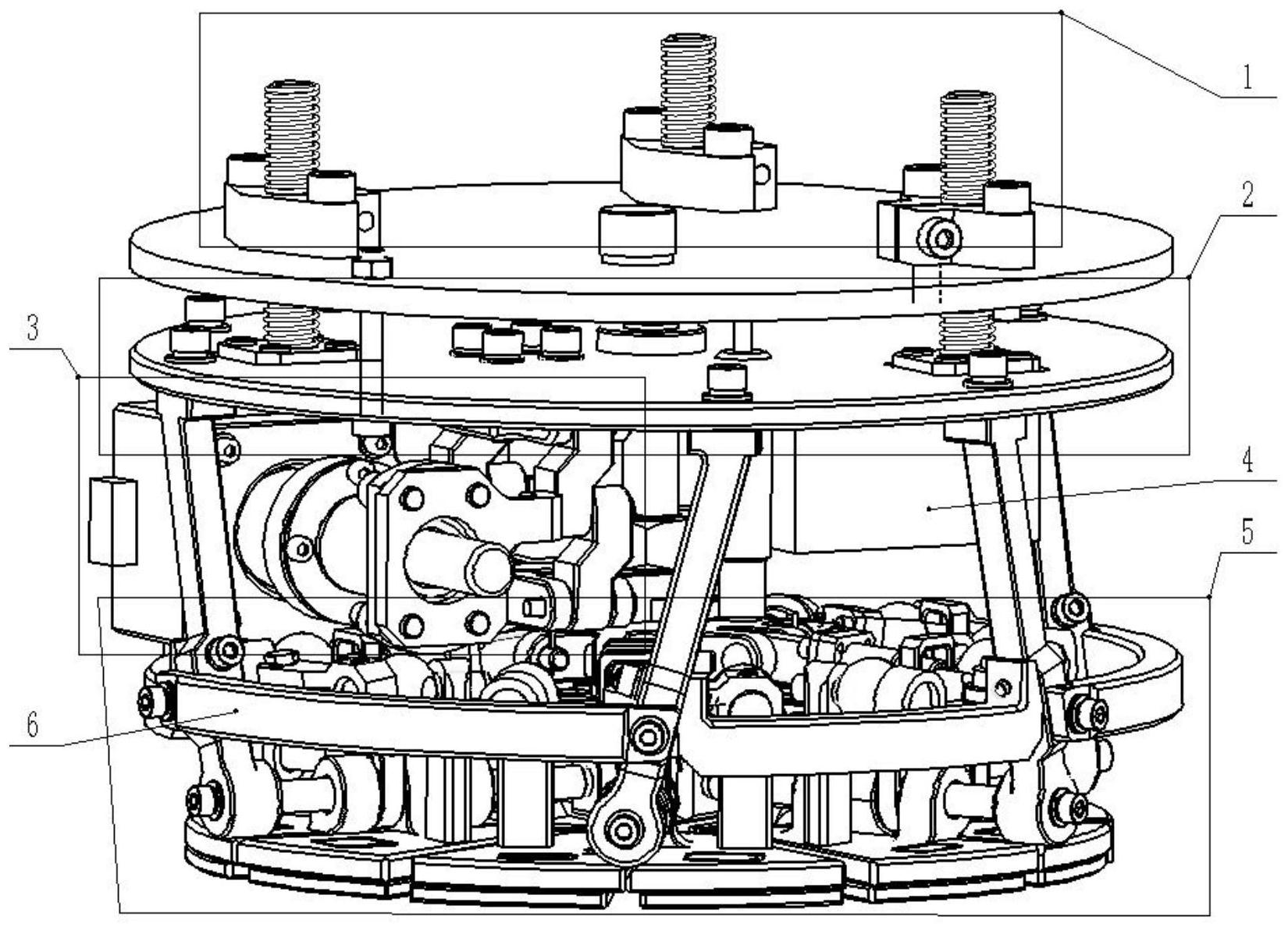
本发明的目的在于提供一种低功耗高集成高可靠空间黏附装置,该装置将连接组 件、缓冲机构、承力结构、前端电机驱动机构、末端传动机构和传感与电控部分相结合,实现 了空间黏附装置在主动平台上的压紧、分离与缓冲的结构集成,可实现在碰撞预压时的切 向加载进行空间精确操控,并可通过与两个双滑块机构、加卸载环差动运动的空间四杆机 构提高黏附面结构展平力;且本发明中采用了基于干黏附材料的空间四杆机构,可很好克 服传统执行器连接适应性差、精确操控能力不足等缺点。 为了达到上述目的,本发明通过以下技术方案实现: 一种低功耗高集成高可靠空间黏附装置,该装置包含: 连接组件,用于与主动平台对接; 用于缓和装置对目标的法向撞击的缓冲机构,与所述连接组件连接; 承力结构,与所述缓冲机构连接; 前端电机驱动机构,与所述缓冲机构连接,并与末端传动机构连接; 装有黏附材料的末端传动机构,与所述承力结构通过圆柱副连接,并与所述前端 电机驱动机构接触; 传感与电控部分,设置在所述缓冲机构上,并控制整个黏附装置; 其中,所述承力结构包含: 装置中心轴,所述装置中心轴顶部与所述缓冲机构连接,其底部设置一中心连接 块; 若干根支撑杆,所述支撑杆的顶部与所述缓冲机构连接; 若干个导向轴,所述导向轴一端与所述中心连接块连接,另一端与所述支撑杆的 底部连接; 若干个连接杆,所述连接杆的两端分别与各个所述支撑杆连接,若干个连接杆构 成一个环形结构。 优选地,所述连接组件包含: 5 CN 111547280 A 说 明 书 2/8 页 若干根锥头导向轴,与所述缓冲机构滑动连接,所述锥头导向轴上设置一固定件; 若干个分离弹簧,分别与所述固定件连接,所述分离弹簧套设在所述锥头导向轴 靠近主动平台的一端上; 轴向对接支承块,设置在所述缓冲机构上。 优选地,所述缓冲机构包含: 连接板,其开设有若干个第一通孔,所述锥头导向轴穿过所述第一通孔与主动平 台对接,所述锥头导向轴通过所述固定件固定在所述连接板上,所述固定件设置在所述连 接板上靠近主动平台的一侧; 顶板,其开设有若干个与所述第一通孔对应的第二通孔,所述第二通孔上安装有 缓冲机构导向套,所述锥头导向轴穿过所述第一通孔插入缓冲机构导向套中,并可在所述 缓冲机构导向套中滑动; 若干个缓冲弹簧,分别套设在各个所述锥头导向轴介于所述顶板和所述连接板之 间的部分; 若干根限位螺钉,所述连接板和所述顶板对应开设有若干个第三通孔和第四通 孔,所述限位螺钉穿过所述第三通孔和第四通孔,所述连接板和所述顶板通过所述限位螺 钉限制最大相对距离; 减振器,其设置在所述顶板上,所述减振器的缓冲轴与所述连接板连接。 优选地,所述顶板和所述连接板为圆形,所述支撑杆为斜向的杆二和杆三,所述杆 二向左倾斜,所述杆三向右倾斜,两者交错设置; 所述连接杆为弧状连接杆,所述弧状连接杆一端与所述杆二连接,另一端与所述 杆三连接,若干个弧状连接杆构成一个圆环。 优选地,所述电机驱动机构包含: 伺服电机,用于提供驱动力,所述伺服电机固定在电机座上; 轴承,所述电机座上开设一圆孔,所述轴承固定在所述圆孔内; 滑动丝杠,其与所述轴承的内圈连接,所述滑动丝杠与一螺母座上设置的丝杠螺 母螺纹连接,所述滑动丝杠的一端与所述伺服电机的输出轴连接,另一端穿过所述螺母座 上开设的第五通孔; 四杆千斤顶机构,其分别与所述电机座和所述螺母座铰接,所述四杆千斤顶机构 上端为固定座,其通过一第一连接件与所述顶板固连,下端为四杆千斤顶机构输出端,与末 端传动机构的轴向滑块通过圆柱副连接; 所述伺服电机驱动所述滑动丝杠转动,进而带动与所述滑动丝杠配套的螺母沿滑 动丝杠轴向移动,进而带动所述电机座和所述螺母座相对靠近或远离,进而使所述四杆千 斤顶机构输出端和所述四杆千斤顶机构的固定座相对远离或靠近。 优选地,所述末端传动机构包含: 轴向滑块,所述轴向滑块套设在所述装置中心轴上,并位于所述中心连接块的上 方,所述轴向滑块上依次套设有上拉环、四杆千斤顶机构输出端和轴向固定螺母,所述轴向 固定螺母与所述轴向滑块固定连接,所述轴向滑块、上拉环、四杆千斤顶机构输出端和轴向 固定螺母组成一个轴向滑块组,所述轴向滑块组可沿所述装置中心轴上下移动; 若干个用于黏附目标的末端黏附单元传动机构,其与所述轴向滑块组连接,所述 6 CN 111547280 A 说 明 书 3/8 页 末端黏附单元传动机构包含用于黏附目标的空间四杆机构,所述空间四杆机构通过差动机 构与所述轴向滑块组连接。 优选地,所述轴向滑块和所述上拉环之间设置有若干个轴向滑块调距螺钉,所述 轴向滑块调距螺钉或者穿过轴向滑块下部板面的直孔拧入所述上拉环上对应位置的螺纹 孔,进而顶到所述四杆千斤顶机构输出端的端面上,或者拧入所述轴向滑块下部板面的螺 纹孔中,进而顶到所述上拉环的下端面上,最终使轴向滑块组成为一个构件,此构件中上拉 环位置可调。 优选地,空间四杆机构包含: 第一扇形杆和第二扇形杆,两者通过所述导向轴铰接; 第一黏附面结构和第二黏附面结构,两者分别与所述第一扇形杆和第二扇形杆的 底部连接; 第一长凸台,其一端与所述第一扇形杆连接,另一端通过一球饺与第二连接件连 接; 第二长凸台,其一端与所述第二扇形杆连接,另一端通过一球饺与第三连接件连 接; 所述第二连接件和所述第三连接件通过铰制孔用螺栓连接。 优选地,所述差动机构包含: 第一双滑块机构,其包含一减震杆,所述减震杆的一端与上拉环铰连接,另一端通 过所述饺制孔用螺栓和空间四杆机构的第二连接件、第三连接件铰连接; 第二双滑块机构,包含下拉杆,一加卸载环作为第二双滑块机构的一个滑块, 所述加卸载环上部开设一支承滑槽,所述第一双滑块机构的减震杆穿过所述支承 滑槽并可在所述支承滑槽内移动,所述加卸载环下部开设一通孔,所述导向轴穿过所述通 孔,所述导向轴与所述加卸载环的下部通孔形成滑块连接; 所述下拉杆一端与所述轴向滑块铰连接,另一端与加卸载环在后者中部位置铰连 接, 空间四杆机构与加卸载环在导向轴轴向固定在一起,可以相互绕导向轴轴线转 动。 优选地,所述第一双滑块机构的减震杆包含: 上半杆,其一端与所述上拉环铰接,另一端与中连杯固接; 下半杆,其一端与所述中连杯通过圆柱副连接,另一端通过所述饺制孔用螺栓和 第二连接件、第三连接件形成铰连接; 所述中连杯两端各开设一盲孔,为第一盲孔和第二盲孔,所述第一盲孔和第二盲 孔通过一通孔连通,一螺钉依次穿过垫片、高分子弹性阻尼元件和所述通孔与所述下半杆 螺纹连接,所述螺钉的螺帽在所述第一盲孔内可移动,所述高分子弹性阻尼元件位于第一 盲孔中,并可受压缩短。 本发明与现有技术相比具有以下优点: (1)本发明的一种低功耗高集成高可靠空间黏附装置,该装置将连接组件、缓冲机 构、承力结构、前端电机驱动机构、末端传动机构和传感与电控部分相结合,实现了空间黏 附装置在主动平台上的压紧、分离与缓冲的结构集成,可实现在碰撞预压时的切向加载可 7 CN 111547280 A 说 明 书 4/8 页 进行空间精确操控,并可通过与两个双滑块机构、加卸载环差动运动的空间四杆机构提高 黏附面结构展平力; (2)本发明的低功耗高集成高可靠空间黏附装置中,与目标脱附时,各个黏附面结 构卸载和后折脱附同时进行,以最简单的运动和机构,获得适应各向异性黏附材料的脱附 动作; (3)本发明的低功耗高集成高可靠空间黏附装置中,加卸载环可承受黏附面结构 斜碰冲击,吸收高频振动,并使黏附面结构后折对称; (4)本发明的低功耗高集成高可靠空间黏附装置中,可通过调节两个轴向滑块的 间距,预紧可拉伸第一双滑块机构中的高分子弹性阻尼元件的弹性阻尼材料,吸收次高频 振动并使末端黏附单元得到恰当的碰撞响应速度。 附图说明 图1为本发明的一种低功耗高集成高可靠空间黏附装置; 图2为本发明的承力结构结构示意图; 图3为本发明的连接组件结构示意图; 图4为本发明的电机驱动机构结构示意图; 图5为本发明的末端传动机构部分结构示意图; 图6为本发明的轴向滑块结构示意图; 图7为本发明的轴向滑块组结构示意图; 图8为本发明的空间四杆机构结构示意图; 图9为本发明的低功耗高集成高可靠空间黏附装置的部分仰视图; 图10为本发明的加卸载环结构示意图; 图11为本发明的减震杆结构示意图。











