
技术摘要:
本发明公开了一种开口液压扳手,主要由马达‑开口齿轮组机构、液压缸‑棘轮棘爪机构、夹紧机构、复位机构、到位机构以及壳体、盖板、把手和反力杆组成,马达‑开口齿轮组机构由液压马达或电机驱动,通过开口齿轮组带动开口齿轮连续旋转,完成快速上扣工序;液压缸‑棘 全部
背景技术:
螺纹连接因其可靠、便捷和可拆卸被广泛应用于现代工业、建筑等行业中。然而, 各种螺纹工件形状、长度各异,使用环境条件也比较复杂。而现有的液压扳手为闭口形式, 适用于规则的棱边形状,且拧紧速度慢,因此其使用场景受到很大的限制。螺纹的拧紧可以 分成两个过程,需求力矩小但旋转行程长的上扣过程和需求力矩大但旋转行程短的紧扣过 程。为解决上述问题,需开发一种体积小重量轻的便携开口液压扳手,且能在满足拧紧力矩 的同时尽快完成螺纹拧紧。
技术实现要素:
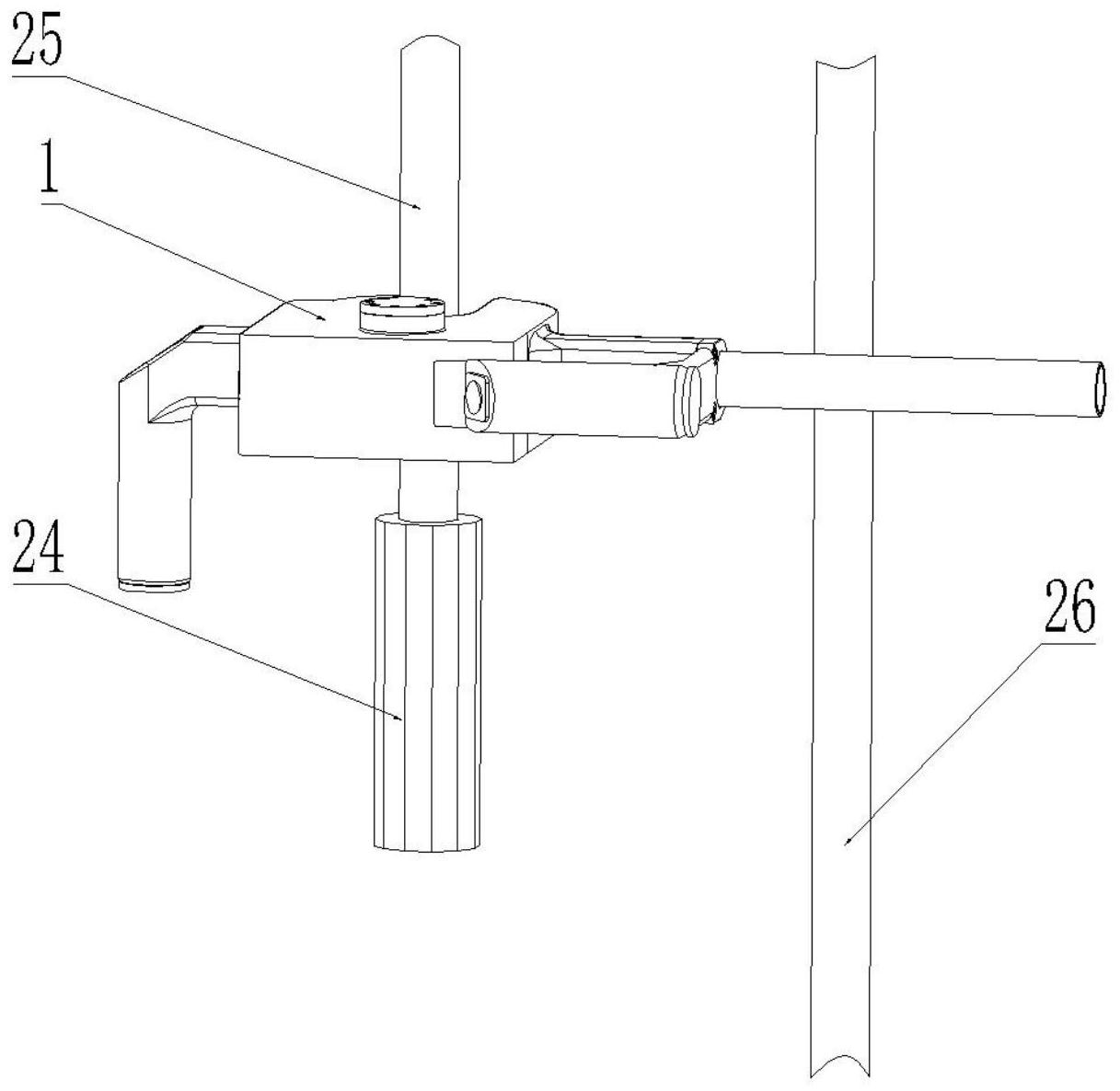
本发明的目的在于提供一种使用场景广泛的开口液压扳手。 实现本发明目的的技术方案为:一种开口液压扳手,包括马达-开口齿轮组机构、 液压缸-棘轮棘爪机构、夹紧机构、复位机构和到位机构; 所述马达-开口齿轮组机构包括马达和开口齿轮组,开口齿轮组由主动轮、两个惰 轮及开口齿轮组成,用于完成上扣过程; 所述液压缸-棘轮棘爪机构由液压缸驱动,通过棘轮棘爪机构推动开口棘轮间歇 旋转,完成预定扭矩的紧扣工序; 所述马达-开口齿轮组机构、液压缸-棘轮棘爪机构集成于壳体和盖板内; 所述夹紧机构用于对目标实现夹紧; 所述复位机构用于在扳手反转复位时将开口齿轮和开口棘轮与壳体开口位置对 正; 所述到位机构用于控制液压缸的最大伸出行程。 进一步的,所述液压缸-棘轮棘爪机构包括液压缸、棘爪、支撑块和开口棘轮,所述 棘爪与液压缸活塞杆的前端通过销轴连接,所述支撑块固定在壳体内侧,对棘爪进行支撑 和导向,并将棘爪所受的径向反力传递到壳体上。 进一步的,所述夹紧机构位于开口齿轮和开口棘轮之间,并与两者通过阶梯销连 接组成执行机构;执行机构通过开口齿轮组或棘爪驱动,带动被夹紧的工件,实现旋转拧 紧。 进一步的,所述开口棘轮上侧和开口齿轮下侧各有一台阶面,通过开口的直角环 形无油轴承配合上下台阶面,实现执行机构的轴向和径向定位。 进一步的,所述执行机构安装于液压扳手对应的前端开口处,所述液压缸和马达 安装于液压扳手后部。 进一步的,所述到位机构为位置检测传感器,通过检测棘爪销轴的位置控制液压 缸的最大伸出行程。 3 CN 111546278 A 说 明 书 2/4 页 进一步的,所述复位机构由楔形块、弹簧和限位螺钉组成,所述楔形块上端开有弹 簧安装孔,侧面开有限位螺钉槽,底面为斜坡状,安装在壳体开口中心线位置滑槽中;所述 弹簧安装于壳体和楔形块安装孔之间,为楔形块提供预紧力;所述限位螺钉通过螺钉槽对 楔形块上下滑动的行程进行限位。 进一步的,所述开口棘轮上表面的中部设置有与楔形块位置相对应的斜槽。 进一步的,所述主动轮通过键轴与马达轴相连,所述马达为液压马达或减速电机。 进一步的,壳体左后部、右后部分别设置有左把手、右把手,右把手布置有控制按 钮;反力杆安装于壳体右侧,其安装孔与壳体为一体化结构,且安装孔上设置有固定旋钮。 与现有技术相比,本发明的显著优点为:(1)整体结构采用开口形式,方便工件卡 入和退出,适用范围广;(2)以液压马达-开口齿轮组机构完成螺纹的上扣工序,以液压缸- 棘轮棘爪机构完成螺纹的紧扣工序,既可快速完成上扣过程,也能满足紧扣过程的力矩需 求;(3)集成有复位机构和到位机构,可根据系统压力自动完成螺纹的上扣、紧扣以及复位 过程,实现螺纹自动化拧紧;(4)将所有执行机构,特别是液压系统的油路和壳体集成于铝 合金壳体和盖板中,整体结构紧凑,重量轻,可靠性好。 附图说明 图1是本发明开口液压扳手实施例的外形示意图。 图2是本发明开口液压扳手实施例隐藏壳体后的内部结构俯视图。 图3是本发明开口液压扳手实施例隐藏壳体后的内部结构左视图。 图4是本发明开口液压扳手实施例复位机构示意图。 图5是本发明开口液压扳手实施例使用的准备状态示意图。 图6是本发明开口液压扳手实施例使用的上扣过程示意图。 图7是本发明开口液压扳手实施例使用的紧扣过程示意图。 附图标记说明:1.开口液压扳手,2.壳体,3.左把手,4.右把手,5.反力杆,6.控制 按钮,7.固定旋钮,8.开口棘轮,9.开口齿轮,10.夹紧机构,11.直角开口无油轴承,12.月牙 板,13.复位机构,1301.弹簧,1302.楔形块,1303.限位螺钉,14.液压缸,15.棘爪,16.销轴, 17.支撑块,18.到位机构,19.马达,20.键轴,21.主动轮,22.惰轮,23.盖板,24.目标工件, 25.待安装工件,26.相邻固定工件。











