
技术摘要:
本发明属于工业机器人领域,具体涉及了一种基于云边协同的运动控制误差补偿系统及方法,旨在解决运动控制误差的补偿算法固定不变,无法满足机械臂不同条件下的自适应误差补偿的问题。本发明包括:边缘服务器运行误差补偿算法求解补偿量,与控制程序融合生成具有误差补 全部
背景技术:
随着科技的进步与发展,机械臂的应用范围也越来越广泛,在实际生产环境中,加 工精度决定产品的质量,因机械臂的控制存在逆向运动学求解问题,运动学参数的误差会 影响到关节角度的求解,因此要提高机械臂加工精度就需要进行误差补偿。 传统的误差补偿方式对于不同任务的误差补偿需求差异性考虑不足,表现为误差 补偿算法几乎固定不变,但随机械臂的不断使用、加工环境的变化,机械臂的精度降低、结 构变化不可避免,这就需要误差补偿算法更具灵活性、环境适应性。
技术实现要素:
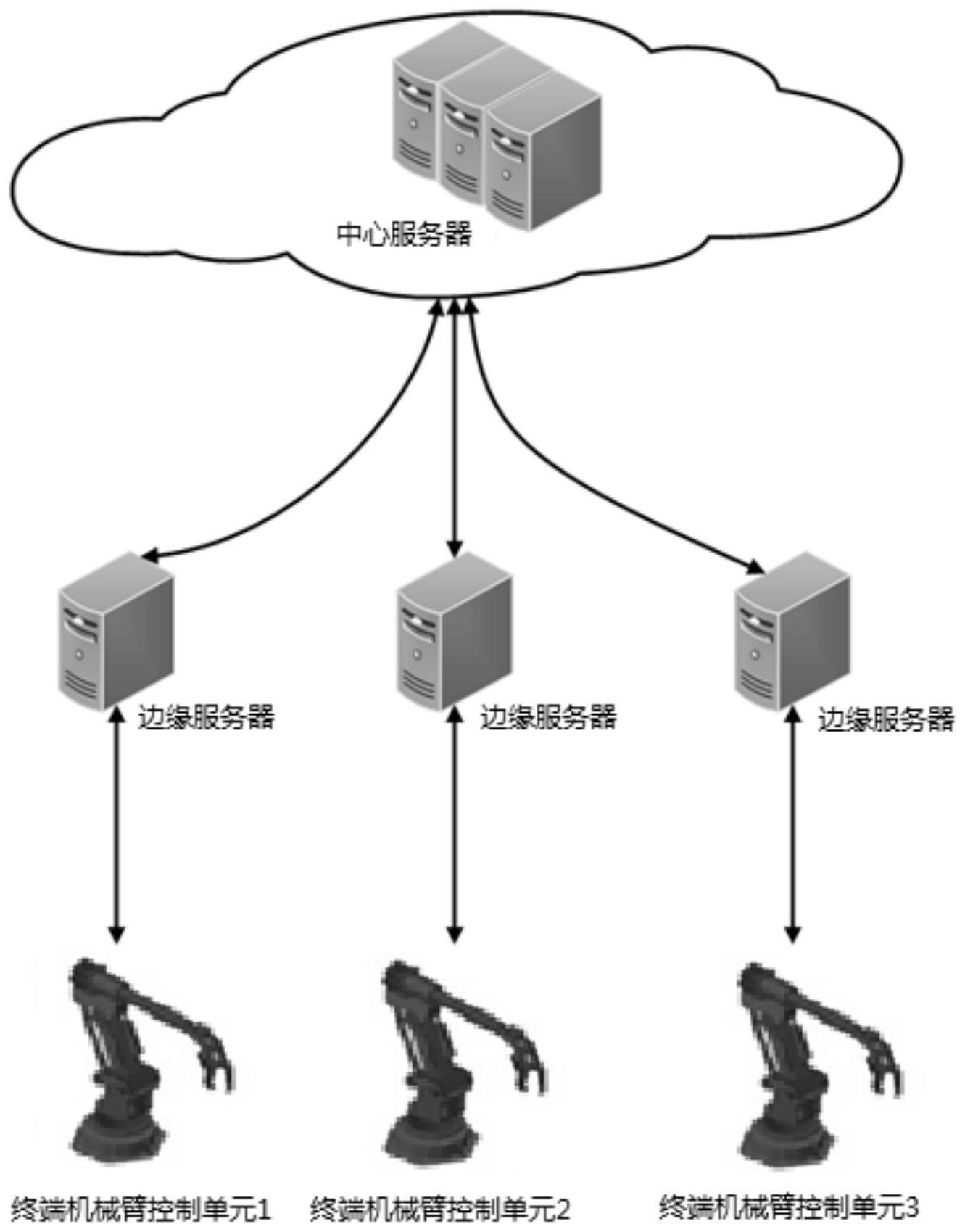
为了解决现有技术中的上述问题,即运动控制误差的补偿算法固定不变,无法满 足机械臂不同条件下的自适应误差补偿的问题,本发明提供了一种基于云边协同的运动控 制误差补偿系统,该误差补偿系统包括中心服务器、边缘服务器和终端机械臂控制单元; 所述中心服务器,用于构建机械臂和加工件的数字孪生系统,并建立运动控制系 统的误差补偿仿真环境;还用于根据加工要求,调用相应的机械臂控制程序,并调用不同的 误差算法进行仿真择优,将获得的最优误差算法存储并发送至所述边缘服务器; 所述边缘服务器,基于所述最优误差算法以及实时的加工数据,获取误差补偿量, 与相应运动控制程序融合生成具有误差补偿效果的控制指令后发送至所述终端机械臂控 制单元;所述实时的加工数据包括实时的机械臂位姿信息和环境参数; 所述终端机械臂控制单元,用于获取实时的加工数据并发送至所述边缘服务器; 还用于将所述具有误差补偿效果的控制指令发送至机械臂。 在一些优选的实施例中,所述中心服务器包括加工设备模型库、加工件模型库、误 差补偿算法模型库和数字孪生建模仿真平台; 所述加工设备模型库,用于存储终端加工设备以及夹具的数字模型,并在完成加 工任务后更新设备的模型信息; 所述加工件模型库,用于存储成品和半成品加工件的数字模型以及接收所述数字 孪生建模仿真平台生成的新的模型或更新的原存储模型; 所述误差补偿算法模型库,用于存储针对不同加工任务的误差算法以及根据加工 任务进行误差补偿算法择优与下发; 所述数字孪生建模仿真平台,基于图形化编辑语言,通过拖拽方式建立对运动控 制进行误差补偿方法试验的仿真环境并进行各误差补偿算法的仿真择优以及构建加工设 备模型和夹具模型。 在一些优选的实施例中,所述边缘服务器包括加工任务客户端、数据采集模块、数 5 CN 111596614 A 说 明 书 2/8 页 据处理模块、误差补偿模块、控制指令生成模块、误差补偿算法库和运动控制算法库; 所述加工任务客户端,为边缘侧人机交互的入口,用于根据加工任务选择运动控 制算法,并发起任务加工操作; 所述数据采集模块,用于接收所述终端机械臂控制单元上传的实时的加工数据; 所述数据处理模块用于对所述实时的加工数据进行预处理,获得预处理数据; 所述误差补偿模块,基于所述预处理数据,调用相应的误差补偿算法求解误差补 偿量; 所述控制指令生成模块,基于所述预处理数据以及误差补偿量,结合加工任务相 应的运动控制程序,获取具有误差补偿效果的控制指令; 所述误差补偿算法库,用于存储边缘侧部署的误差补偿算法以及接收并存储从所 述中心服务器平台下发的误差补偿算法,并为加工任务提供相应误差补偿算法; 所述运动控制算法库,用于存储边缘侧部署的运动控制算法,并根据不同的加工 任务选择相应的运动控制算法。 在一些优选的实施例中,所述实时的机械臂位姿运动参数和环境参数包括: 实时的机械臂的关节角、机械臂末端位姿、电机转速及扭矩、被加工件位置、装配 夹具参数、外部负载和外部电压。 在一些优选的实施例中,所述加工设备模型库还用于存储机械臂动力学模型; 所述机械臂动力学模型,用于描述机械臂末端运动和各关节变量之间的关系。 在一些优选的实施例中,所述数字孪生建模仿真平台进行各误差补偿算法的仿真 择优之后,还设置有误差补偿算法库在线更新的步骤,其方法为: 所述数字孪生建模仿真平台,在每一次的误差补偿算法仿真择优之后,可利用已 有加工任务的仿真系统进行误差补偿算法的仿真择优,并对误差补偿算法库中已有加工任 务原有误差补偿算法进行更新。 本发明的另一方面,提出了一种基于云边协同的运动控制误差补偿方法,基于上 述的基于云边协同的运动控制误差补偿系统,该误差补偿方法包括: 步骤S10,边缘服务器通过加工任务客户端从运动控制算法库中调用相关运动控 制算法,对加工任务进行轨迹规划从而生成控制程序,发起加工任务,同时向误差补偿算法 库中调用相关误差补偿算法; 步骤S20,若所述边缘服务器的误差补偿算法库中有相应加工任务运动控制的误 差补偿算法,跳转步骤S80; 步骤S30,若所述边缘服务器的误差补偿算法库中没有相应加工任务运动控制的 误差补偿算法,则向中心服务器平台发送误差补偿算法部署请求; 步骤S40,所述中心服务器平台收到所述边缘服务器发送的误差补偿算法部署请 求后,根据请求内容从误差补偿算法模型库调取相应的补偿算法并下发给所述边缘服务 器; 步骤S50,若所述中心服务器平台没有所述边缘服务器请求部署的误差补偿算法, 则根据所述边缘服务器上传的机械臂标识信息和相应的加工任务,利用数字孪生建模仿真 平台构建加工任务的仿真系统,建立当前生产环境下的运动控制模型,调用所述边缘服务 器上传的本次加工任务的控制程序,进行相应运动控制误差补偿方法仿真择优; 6 CN 111596614 A 说 明 书 3/8 页 步骤S60,将仿真择优获取的最优运动控制误差补偿算法下发至所述边缘服务器, 并存入所述中心服务器的误差补偿算法模型库中; 步骤S70,所述边缘服务器接收所述中心服务器下发的误差补偿算法,并存入相应 误差补偿算法库中; 步骤S80,所述边缘服务器根据调取的相应加工任务的误差补偿算法,计算加工轨 迹下的机械臂位姿的关节角补偿量,将关节角补偿量与运动控制程序相融合,生成具有加 工轨迹误差补偿的运动控制指令并发送至机械臂。 在一些优选的实施例中,步骤S50中“进行相应运动控制误差补偿方法仿真择优”, 其标准为: 加工任务的仿真运动控制模型的加工路径与所设定的路径总体偏差最小或达到 设定的加工标准。 在一些优选的实施例中,步骤S50中“建立当前生产环境下的运动控制模型”,其方 法为: 边缘服务器上传本次加工任务所涉及的机械臂标识信息,中心服务器根据所述机 械臂标识信息,从所述中心服务器的加工设备模型库中调取相应的机械臂模型以及从所述 加工件模型库中调取相应的加工件模型。 在一些优选的实施例中,步骤S50中“进行相应运动控制误差补偿方法仿真择优” 之后还可利用已有加工任务的仿真系统进行误差补偿算法的仿真择优,并对误差补偿算法 库中已有加工任务原有误差补偿算法进行更新。 在一些优选的实施例中,步骤S80中“计算加工轨迹下的机械臂位姿的关节角补偿 量”,其方法包括插值补偿法、神经网络方法、镜像法。 本发明的有益效果: 本发明基于云边协同的运动控制误差补偿系统,通过中心服务器平台建模的方式 实现云端与边缘侧协同计算,在中心服务器平台使用多种补偿算法并行计算结构参数补偿 量,利用建模仿真的方式测试误差补偿算法,将模型误差考虑在内,提高了补偿算法的精 度;中心服务器平台利用模型对多种误差补偿算法仿真实验,择优下发误差补偿算法,且能 对已有误差补偿算法从优更新,使边缘侧误差补偿算法具有自适应性,能够应用于复杂多 变的工况下的运动控制误差补偿。 附图说明 通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它 特征、目的和优点将会变得更明显: 图1是本发明基于云边协同的运动控制误差补偿系统的框架示意图; 图2是本发明基于云边协同的运动控制误差补偿系统的各模块框架示意图 图3是本发明基于云边协同的运动控制误差补偿系统一种实施例的误差补偿方法 流程示意图; 图4是本发明基于云边协同的运动控制误差补偿系统一种实施例的控制量和运动 量关系的逻辑图。 7 CN 111596614 A 说 明 书 4/8 页











