
技术摘要:
本申请涉及人工智能领域,应用于智慧交通领域中,提高一种基于图像检测的车辆部件识别方法、装置、计算机设备和存储介质。所述方法包括:对待检测的目标车辆图片进行识别得到识别结果,根据识别结果确定目标车辆的显示区域和车辆型号,根据识别结果和车辆型号,确定待 全部
背景技术:
随着社会经济的日益发展,车辆在日常生活中得到了广泛使用,车辆在使用过程 中由于自然灾害或者意外事故导致的损坏,需要对车辆进行定损处理,以推进后续的理赔 事宜。 在车辆定损场景下,需要对车辆外观部件进行识别。传统的识别方式,通过接收现 场拍摄的车损照片,对车损照片上汽车的各部件进行识别,确定车辆外观各部件损伤情况。 但受到事故现场复杂情况以及拍摄技术的限制,容易出现无法准确确定受损车辆各部件的 位置,以及受损部件的受损情况。
技术实现要素:
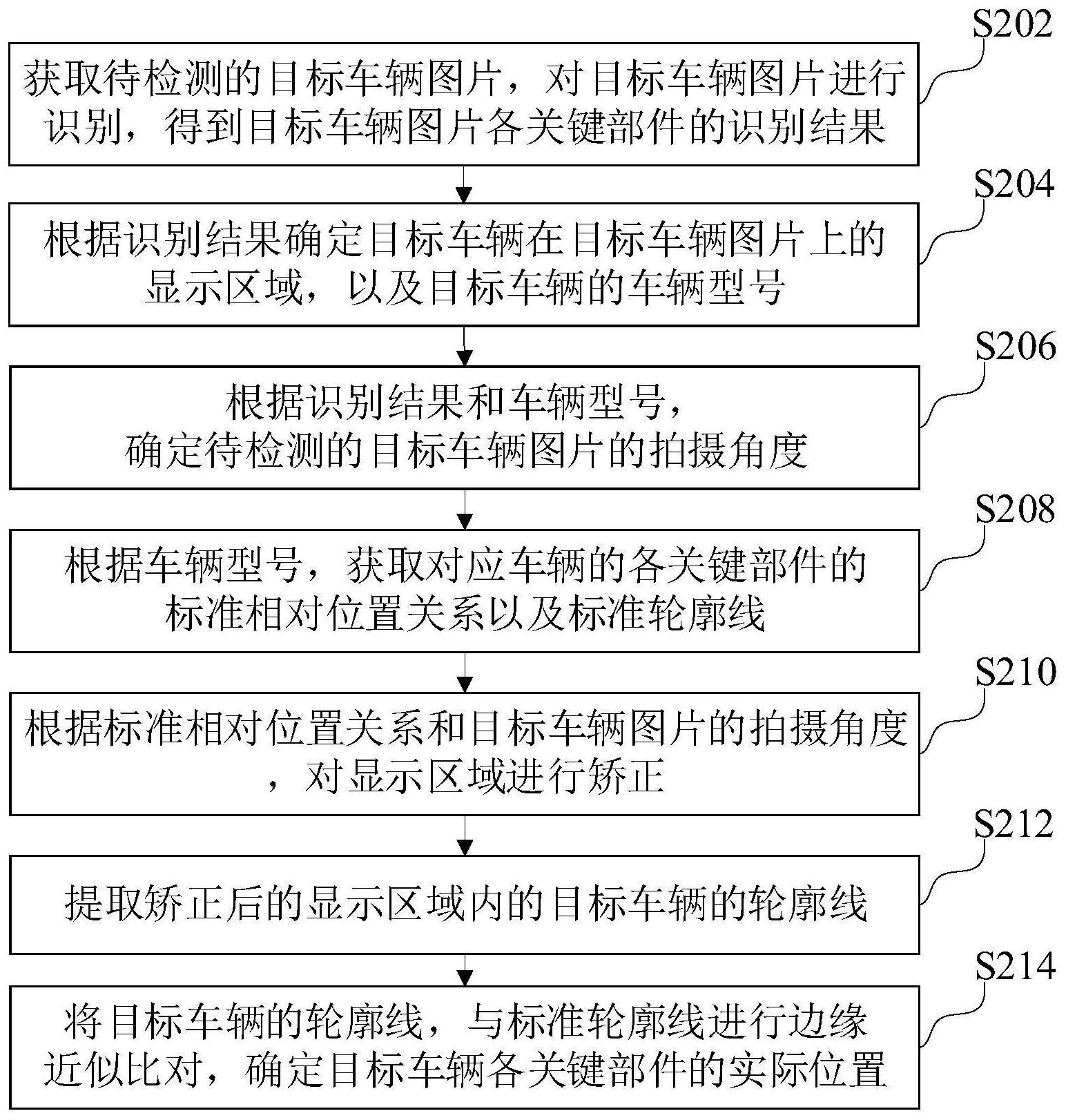
基于此,有必要针对上述技术问题,提供一种能够提高车辆定损场景下隔车辆外 观部件识别准确度的车辆部件识别方法、装置、计算机设备和存储介质。 一种车辆部件识别方法,所述方法包括: 获取待检测的目标车辆图片,对所述目标车辆图片进行识别,得到所述目标车辆 图片各关键部件的识别结果; 根据所述识别结果确定目标车辆在所述目标车辆图片上的显示区域,以及所述目 标车辆的车辆型号; 根据所述识别结果和所述车辆型号,确定所述待检测的目标车辆图片的拍摄角 度; 根据所述车辆型号,获取对应车辆的各关键部件的标准相对位置关系以及标准轮 廓线; 根据所述标准相对位置关系和所述目标车辆图片的拍摄角度,对所述显示区域进 行矫正; 提取矫正后的所述显示区域内的目标车辆的轮廓线; 将所述目标车辆的轮廓线,与所述标准轮廓线进行边缘近似比对,确定所述目标 车辆各关键部件的实际位置。 在其中一个实施例中,获取待检测的目标车辆图片,对所述目标车辆图片进行识 别,得到所述目标车辆图片各关键部件的识别结果,包括: 获取待检测的目标车辆图片; 获取经样本集车辆图片训练后的卷积神经网络模型; 将所述目标车辆图片输入所述训练后的卷积神经网络模型,对所述目标车辆图片 进行识别; 5 CN 111553268 A 说 明 书 2/13 页 获取所述目标车辆图片各关键部件的识别结果; 还包括: 将所述识别结果上传至区块链。 在其中一个实施例中,所述根据所述识别结果确定目标车辆在所述目标车辆图片 上的显示区域,以及所述目标车辆的车辆型号,包括: 基于所述识别结果,确定所述目标车辆各关键部件的相对位置; 根据所述目标车辆各关键部件的相对位置,确定目标车辆在所述目标车辆图片上 的显示区域; 提取所述显示区域内的所述目标车辆,并确定所述目标车辆的车辆型号。 在其中一个实施例中,所述根据所述识别结果和所述车辆型号,确定所述待检测 的目标车辆图片的拍摄角度,包括: 根据目标车辆的各关键部件的识别结果,得到所述目标车辆的各关键部件的关键 点角度向量,并确定与所述目标车辆的各关键部件对应的特征向量矩阵; 根据所述目标车辆的车辆型号,获取对应车辆的各关键部件的基线特征向量; 将所述基线特征向量与所述特征向量矩阵进行比对,旋转所述基线特征向量,确 定所述待检测的目标车辆图片的拍摄角度。 在其中一个实施例中,所述将所述目标车辆的轮廓线,与所述标准轮廓线进行边 缘近似比对,确定所述目标车辆各关键部件的实际位置,包括: 将所述目标车辆的轮廓线,与所述标准轮廓线进行边缘近似比对,得到边缘近似 比对结果; 基于所述边缘近似比对结果,建立所述目标车辆的关键部件与相同车辆型号的车 辆的关键部件之间的关联关系; 根据所述关联关系和所述标准相对位置关系,确定所述目标车辆各关键部件的实 际位置。 在其中一个实施例中,所述根据目标车辆的各关键部件的识别结果,得到所述目 标车辆的各关键部件的关键点角度向量,并确定与所述目标车辆的各关键部件对应的特征 向量矩阵,包括: 根据所述目标车辆的各关键部件的识别结果,确定各所述关键部件的关键点位 置; 提取各所述关键点位置上的关键点,基于预设排列顺序,计算任意两个关键点之 间的关键点角度向量; 根据所述关键点角度向量,确定对应关键点的相关角度向量; 根据所述关键点角度向量以及对应的相关角度向量,得到与所述目标车辆的各关 键部件对应的特征向量矩阵。 在其中一个实施例中,所述将所述基线特征向量与所述特征向量矩阵进行比对, 旋转所述基线特征向量,确定所述待检测的目标车辆图片的拍摄角度,包括: 提取所述特征向量矩阵的水平特征向量和垂直特征向量; 将所述水平特征向量和垂直特征向量,与所述基线特征向量进行比对,得到比对 结果; 6 CN 111553268 A 说 明 书 3/13 页 基于所述比对结果,确定所述基线特征向量的旋转角度; 根据所述旋转角度对所述基线特征向量进行旋转,并计算所述基线向量旋转过程 中公共关键点的角度向量的几何均值;所述公共关键点为特征向量矩阵和所述基线特征向 量共同的关键点; 当所述公共关键点角度向量的几何均值达到预设阈值时,得到所述待检测的目标 车辆图片的拍摄角度。 一种车辆部件识别装置,所述装置包括: 识别结果生成模块,用于获取待检测的目标车辆图片,对所述目标车辆图片进行 识别,得到所述目标车辆图片各关键部件的识别结果; 显示区域确定模块,用于根据所述识别结果确定目标车辆在所述目标车辆图片上 的显示区域,以及所述目标车辆的车辆型号; 拍摄角度确定模块,用于根据所述识别结果和所述车辆型号,确定所述待检测的 目标车辆图片的拍摄角度; 第一获取模块,用于根据所述车辆型号,获取对应车辆的各关键部件的标准相对 位置关系以及标准轮廓线; 显示区域矫正模块,用于根据所述标准相对位置关系和所述目标车辆图片的拍摄 角度,对所述显示区域进行矫正; 目标车辆轮廓线提取模块,用于提取矫正后的所述显示区域内的目标车辆的轮廓 线; 关键部件实际位置确定模块,用于将所述目标车辆的轮廓线,与所述标准轮廓线 进行边缘近似比对,确定所述目标车辆各关键部件的实际位置。 一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理 器执行所述计算机程序时实现以下步骤: 获取待检测的目标车辆图片,对所述目标车辆图片进行识别,得到所述目标车辆 图片各关键部件的识别结果; 根据所述识别结果确定目标车辆在所述目标车辆图片上的显示区域,以及所述目 标车辆的车辆型号; 根据所述识别结果和所述车辆型号,确定所述待检测的目标车辆图片的拍摄角 度; 根据所述车辆型号,获取对应车辆的各关键部件的标准相对位置关系以及标准轮 廓线; 根据所述标准相对位置关系和所述目标车辆图片的拍摄角度,对所述显示区域进 行矫正; 提取矫正后的所述显示区域内的目标车辆的轮廓线; 将所述目标车辆的轮廓线,与所述标准轮廓线进行边缘近似比对,确定所述目标 车辆各关键部件的实际位置。 一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执 行时实现以下步骤: 获取待检测的目标车辆图片,对所述目标车辆图片进行识别,得到所述目标车辆 7 CN 111553268 A 说 明 书 4/13 页 图片各关键部件的识别结果; 根据所述识别结果确定目标车辆在所述目标车辆图片上的显示区域,以及所述目 标车辆的车辆型号; 根据所述识别结果和所述车辆型号,确定所述待检测的目标车辆图片的拍摄角 度; 根据所述车辆型号,获取对应车辆的各关键部件的标准相对位置关系以及标准轮 廓线; 根据所述标准相对位置关系和所述目标车辆图片的拍摄角度,对所述显示区域进 行矫正; 提取矫正后的所述显示区域内的目标车辆的轮廓线; 将所述目标车辆的轮廓线,与所述标准轮廓线进行边缘近似比对,确定所述目标 车辆各关键部件的实际位置。 上述车辆部件识别方法、装置、计算机设备和存储介质,通过对获取的待检测的目 标车辆图片进行识别,得到目标车辆图片各关键部件的识别结果,将所述识别结果上传至 区块链,根据识别结果确定目标车辆在目标车辆图片上的显示区域,以及目标车辆的车辆 型号。根据识别结果和车辆型号,确定待检测的目标车辆图片的拍摄角度,根据车辆型号, 获取对应车辆的各关键部件的标准相对位置关系以及标准轮廓线。进而根据标准相对位置 关系和目标车辆图片的拍摄角度,对显示区域进行矫正,获得尽可能覆盖车辆各关键部件 的显示区域。通过提取矫正后的显示区域内的目标车辆的轮廓线,并将目标车辆的轮廓线, 与标准轮廓线进行边缘近似比对,可建立各个部件之间的关联关系。基于轮廓线以及部件 间的关联关系,进一步确定目标车辆各关键部件的实际位置,提高了车辆关键部件识别的 准确度。 附图说明 图1为一个实施例中车辆部件识别方法的应用场景图; 图2为一个实施例中车辆部件识别方法的流程示意图; 图3为一个实施例中得到目标车辆图片各关键部件的识别结果的流程示意图; 图4为一个实施例中标准车辆的第一部分关键部件标注示意图; 图5为一个实施例中标准车辆的第二部分关键部件标注示意图; 图6为一个实施例中对目标车辆图片上的显示区域和目标车辆的车辆型号进行确 定的流程示意图; 图7为一个实施例中确定目标车辆图片的拍摄角度的流程示意图; 图8为一个实施例中目标车辆关键部件的关键点位置示意图; 图9为一个实施例中目标车辆的关键部件的关键点角度向量示意图; 图10为一个实施中样本车辆的基线特征向量示意图; 图11为一个实施例中车辆部件识别方法的向量比对示意图; 图12为一个实施例中车辆部件识别装置的结构框图; 图13为一个实施例中计算机设备的内部结构图。 8 CN 111553268 A 说 明 书 5/13 页











