
技术摘要:
本申请公开了一种光圈镜头类型的识别方法,包括获取将光圈镜头的各个驱动管脚均置为相同电平状态时所对应的第一图像亮度值;获取依次将各个驱动管脚中的一个驱动管脚置为高电平、其余驱动管脚置为低电平时所对应的各个第二图像亮度值;判断各个第二图像亮度值中是否存 全部
背景技术:
随着监控业务在当今社会中的普及,监控摄像机得到了广泛应用。一般地,常用的 摄像机镜头有DC光圈镜头(DC-IRIS镜头)和P光圈镜头(P-IRIS镜头)两种,其中,DC光圈镜 头内部利用直流电机来调节光圈开度大小,而P光圈镜头内部则利用步进电机来调节光圈 开度大小,因而,两者采用的是不同的驱动电压信号。部分现有技术中的摄像机可以适用于 这两种光圈镜头,但大都采用特定的硬件电路来识别光圈镜头的类型,这无疑增加了硬件 成本。鉴于此,提供一种解决上述技术问题的方法是本领域技术人员所亟需关注的。
技术实现要素:
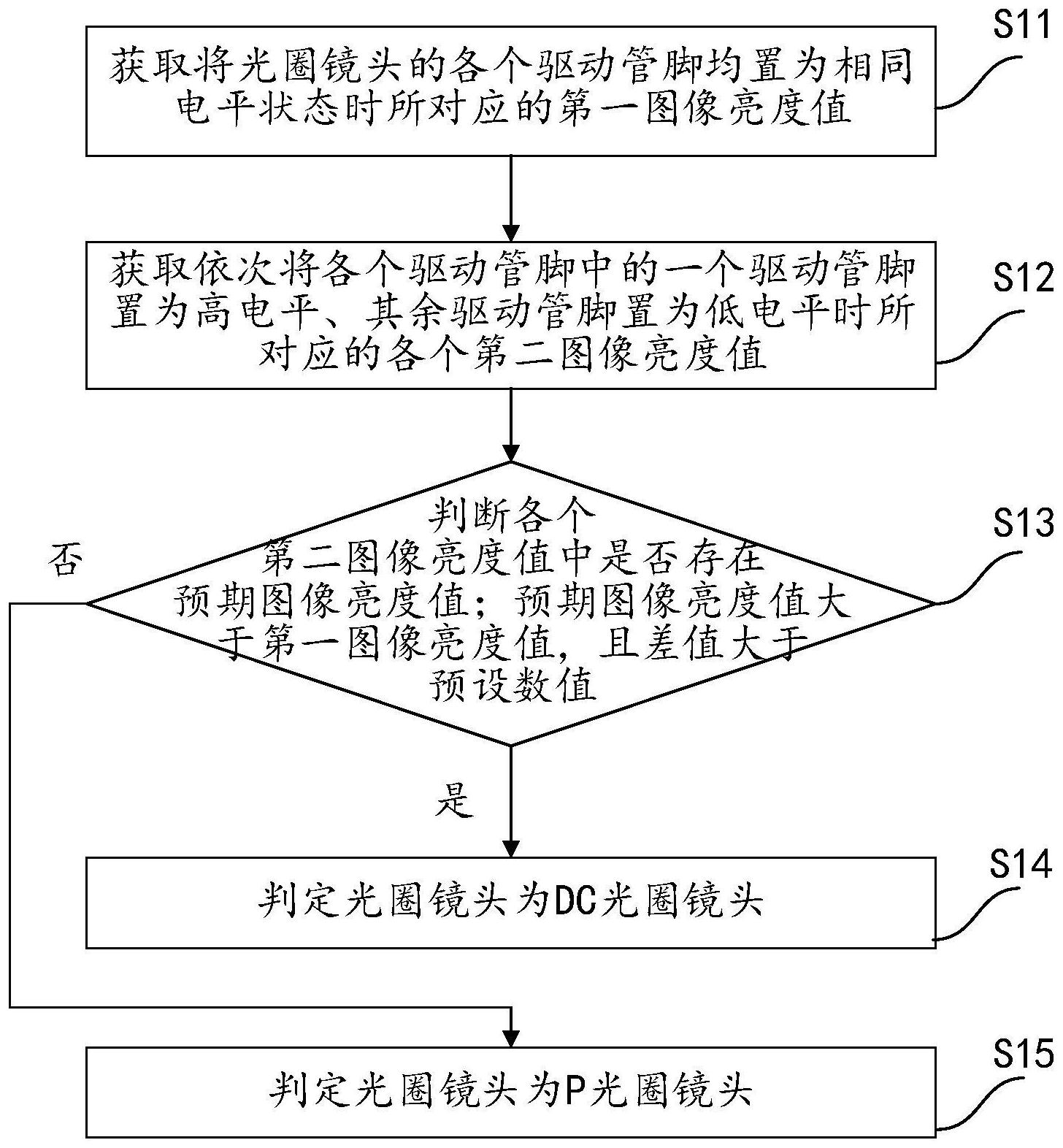
本申请的目的在于提供一种摄像机及其图像处理器、光圈镜头类型的识别方法和 装置,以便在确保对不同类型光圈镜头的适用性的同时,有效地降低硬件成本,提高产品经 济效益。 为解决上述技术问题,第一方面,本申请公开了一种光圈镜头类型的识别方法,包 括: 获取将光圈镜头的各个驱动管脚均置为相同电平状态时所对应的第一图像亮度 值; 获取依次将所述各个驱动管脚中的一个驱动管脚置为高电平、其余驱动管脚置为 低电平时所对应的各个第二图像亮度值; 判断所述各个第二图像亮度值中是否存在预期图像亮度值;所述预期图像亮度值 大于所述第一图像亮度值,且差值大于预设数值; 若是,则判定所述光圈镜头为DC光圈镜头; 若否,则判定所述光圈镜头为P光圈镜头。 可选地,在所述判定所述光圈镜头为DC光圈镜头之后,还包括: 判定与所述预期图像亮度值对应的、被置为高电平的驱动管脚为所述DC光圈镜头 的正相电路中的正极驱动管脚。 可选地,在所述判定所述光圈镜头为P光圈镜头之后,还包括: 确定所述各个驱动管脚中属于同相电路的驱动管脚对; 分别确定各个所述驱动管脚对中2个驱动管脚的假设正负相对极性; 根据所述假设正负相对极性确定使光圈开度按预期变化趋势变化的所述各个驱 动管脚的默认驱动电压序列; 判断采用所述默认驱动电压序列驱动所述P光圈镜头时图像亮度值的实际变化趋 势是否与所述预期变化趋势相同; 4 CN 111586396 A 说 明 书 2/10 页 若是,则判定偶数个所述驱动管脚对的真实正负相对极性与对应的所述假设正负 相对极性相反; 若否,则判定奇数个所述驱动管脚对的真实正负相对极性与对应的所述假设正负 相对极性相反。 可选地,所述确定所述各个驱动管脚中属于同相电路的驱动管脚对包括: 将所述P光圈镜头的第一驱动管脚置为高电平; 获取其余各个所述驱动管脚的电平状态; 将所述电平状态同为高电平的第二驱动管脚与所述第一驱动管脚判定为第一驱 动管脚对; 将所述电平状态同为低电平的第三驱动管脚与第四驱动管脚判定为第二驱动管 脚对。 可选地,所述预期变化趋势具体为单调增大或者单调减小。 可选地,若判定偶数个所述驱动管脚对的真实正负相对极性与对应的所述假设正 负相对极性相反,则: 将所述默认驱动电压序列作为令实际光圈开度按所述预期变化趋势变化的第一 驱动电压序列; 将所述默认驱动电压序列的逆序列作为令实际光圈开度按所述预期变化趋势反 向变化的第二驱动电压序列; 若判定奇数个所述驱动管脚对的真实正负相对极性与对应的所述假设正负相对 极性相反,则: 将所述默认驱动电压序列的逆序列作为令实际光圈开度按所述预期变化趋势变 化的所述第一驱动电压序列; 将所述默认驱动电压序列作为令实际光圈开度按所述预期变化趋势反向变化的 所述第二驱动电压序列。 第二方面,本申请还公开了一种光圈镜头类型的识别装置,包括: 第一获取模块,用于获取将光圈镜头的各个驱动管脚均置为相同电平状态时所对 应的第一图像亮度值; 第二获取模块,用于获取依次将所述各个驱动管脚中的一个驱动管脚置为高电 平、其余驱动管脚置为低电平时所对应的各个第二图像亮度值; 类型判断模块,用于判断所述各个第二图像亮度值中是否存在预期图像亮度值; 所述预期图像亮度值大于所述第一图像亮度值,且差值大于预设数值;若是,则判定所述光 圈镜头为DC光圈镜头;若否,则判定所述光圈镜头为P光圈镜头。 可选地,所述类型判断模块还用于:在所述判定所述光圈镜头为DC光圈镜头之后, 判定与所述预期图像亮度值对应的、被置为高电平的驱动管脚为所述DC光圈镜头的正相电 路中的正极驱动管脚。 可选地,还包括管脚判断模块,用于在所述类型判断模块判定所述光圈镜头为P光 圈镜头之后,确定所述各个驱动管脚中属于同相电路的驱动管脚对;分别确定各个所述驱 动管脚对中2个驱动管脚的假设正负相对极性;根据所述假设正负相对极性确定使光圈开 度按预期变化趋势变化的所述各个驱动管脚的默认驱动电压序列;判断采用所述默认驱动 5 CN 111586396 A 说 明 书 3/10 页 电压序列驱动所述P光圈镜头时图像亮度值的实际变化趋势是否与所述预期变化趋势相 同;若是,则判定偶数个所述驱动管脚对的真实正负相对极性与对应的所述假设正负相对 极性相反;若否,则判定奇数个所述驱动管脚对的真实正负相对极性与对应的所述假设正 负相对极性相反。 可选地,所述管脚判断模块具体用于:将所述P光圈镜头的第一驱动管脚置为高电 平;获取其余各个所述驱动管脚的电平状态;将所述电平状态同为高电平的第二驱动管脚 与所述第一驱动管脚判定为第一驱动管脚对;将所述电平状态同为低电平的第三驱动管脚 与第四驱动管脚判定为第二驱动管脚对。 可选地,所述预期变化趋势具体为单调增大或者单调减小。 可选地,若判定偶数个所述驱动管脚对的真实正负相对极性与对应的所述假设正 负相对极性相反,则所述管脚判断模块还用于: 将所述默认驱动电压序列作为令实际光圈开度按所述预期变化趋势变化的第一 驱动电压序列;将所述默认驱动电压序列的逆序列作为令实际光圈开度按所述预期变化趋 势反向变化的第二驱动电压序列; 若判定奇数个所述驱动管脚对的真实正负相对极性与对应的所述假设正负相对 极性相反,则所述管脚判断模块还用于: 将所述默认驱动电压序列的逆序列作为令实际光圈开度按所述预期变化趋势变 化的所述第一驱动电压序列;将所述默认驱动电压序列作为令实际光圈开度按所述预期变 化趋势反向变化的所述第二驱动电压序列。 第三方面,本申请还公开了一种摄像机的图像处理器,包括: 存储器,用于存储计算机程序; 处理器,用于执行所述计算机程序以实现如上所述的任一种光圈镜头类型的识别 方法的步骤。 第四方面,本申请还公开了一种摄像机,包括光圈镜头、驱动器、电平状态检测电 路以及如上所述的图像处理器;所述驱动器的输出端分别与所述光圈镜头的驱动管脚和所 述电平状态检测电路的输入端连接,用于驱动所述光圈镜头;所述电平状态检测电路的输 出端与所述图像处理器连接,用于检测所述驱动管脚的电平状态。 可选地,所述电平状态检测电路具体为电阻分压电路。 本申请所提供的光圈镜头类型的识别方法包括:获取将光圈镜头的各个驱动管脚 均置为相同电平状态时所对应的第一图像亮度值;获取依次将所述各个驱动管脚中的一个 驱动管脚置为高电平、其余驱动管脚置为低电平时所对应的各个第二图像亮度值;判断所 述各个第二图像亮度值中是否存在预期图像亮度值;所述预期图像亮度值大于所述第一图 像亮度值,且差值大于预设数值;若是,则判定所述光圈镜头为DC光圈镜头;若否,则判定所 述光圈镜头为P光圈镜头。 可见,本申请利用DC光圈镜头与P光圈镜头的驱动方式的差异,根据将单一驱动管 脚输入高电平时的图像亮度反馈结果,即可准确地识别出两种不同类型的光圈镜头,不仅 确保了对不同类型光圈镜头的适用性,而且还不依赖于硬件电路,有效降低了硬件成本,提 高了产品经济效益。本申请所提供的光圈镜头类型的识别装置、摄像机和图像处理器均可 以实现上述光圈镜头类型的识别方法,同样具有上述有益效果。 6 CN 111586396 A 说 明 书 4/10 页 附图说明 为了更清楚地说明现有技术和本申请实施例中的技术方案,下面将对现有技术和 本申请实施例描述中需要使用的附图作简要的介绍。当然,下面有关本申请实施例的附图 描述的仅仅是本申请中的一部分实施例,对于本领域普通技术人员来说,在不付出创造性 劳动的前提下,还可以根据提供的附图获得其他的附图,所获得的其他附图也属于本申请 的保护范围。 图1为本申请实施例所提供的光圈镜头的一种连接线缆的示意图; 图2为本申请实施例所提供的光圈镜头类型的识别方法在一











