
技术摘要:
一种用于在仓库管理系统的订单队列中对多个订单进行分组的方法,每个订单包括一个或多个物品,每个物品与仓库中的物理位置相关联。该方法包括确定多个订单中每个物品在仓库中的物理位置。对于每个订单,该方法还包括建立至少一个集群域,每个集群域包括来自相应订单的 全部
背景技术:
订单履行通常是在一个装满产品的大型仓库中执行,产品将被运送到已经通过互 联网下订单进行送货上门的客户。在某些操作中,人类可以通过遍历仓库以手动检索订单 中的物品。在其他操作中,可以使用机器人代替人类来执行物品检索功能,或者可以使用机 器人来辅助人类进行物品检索,以提高生产率和效率。 及时、准确和高效地履行此类订单在逻辑上至少可以说具有挑战性。单击虚拟购 物车中的“结算”按钮将创建一个“订单”。该订单包括一个将要发送到特定地址的物品列 表。“履行”的过程包括从一个大仓库实际提取或“挑选”这些物品,包装它们,并将它们运送 到指定的地址。因此,订单履行过程的一个重要目标是在尽可能短的时间内装运尽可能多 的物品。 仓库管理系统(WMS)是一种软件应用程序,它支持如上所述的订单履行仓库中的 日常操作,它可以利用人工和/或机器人来提高操作的效率和生产率。WMS程序可对任务进 行集中管理,例如跟踪库存水平和库存位置。仓库管理系统还支持或指导所有主要和许多 次要仓库任务,例如接收,检查和验收、上架、内部补货到拣货位置、拣选、包装、在装运台上 组装订单、证明文件和装运(装载到运输工具上)。 WMS通常从上级主机系统(通常是ERP系统)接收订单。为了通过电子商务订单履行 订单,客户在线下订单后,信息就会通过主机(ERP系统)传递到WMS。然后,在WMS中处理管理 此订单的所有必要步骤(例如,挑选已订购的物品等)。之后,信息被发送回业务主机,以支 持财务交易、向客户提前发货通知、库存管理等。 随着来自WMS的订单的累积,它们被保存在订单队列中,并分发给人类或机器人以 在仓库内执行订单。可以从到达顺序的订单队列中依次获取订单,并将其分配给人类和/或 机器人以执行订单。订单也可以安排在订单队列中,并根据客户合同中定义的服务水平要 求或基于客户运输要求进行分配。尽管这些系统已经变得非常高级,但是仍然需要在订单 排队和分配过程中提高效率和生产率。
技术实现要素:
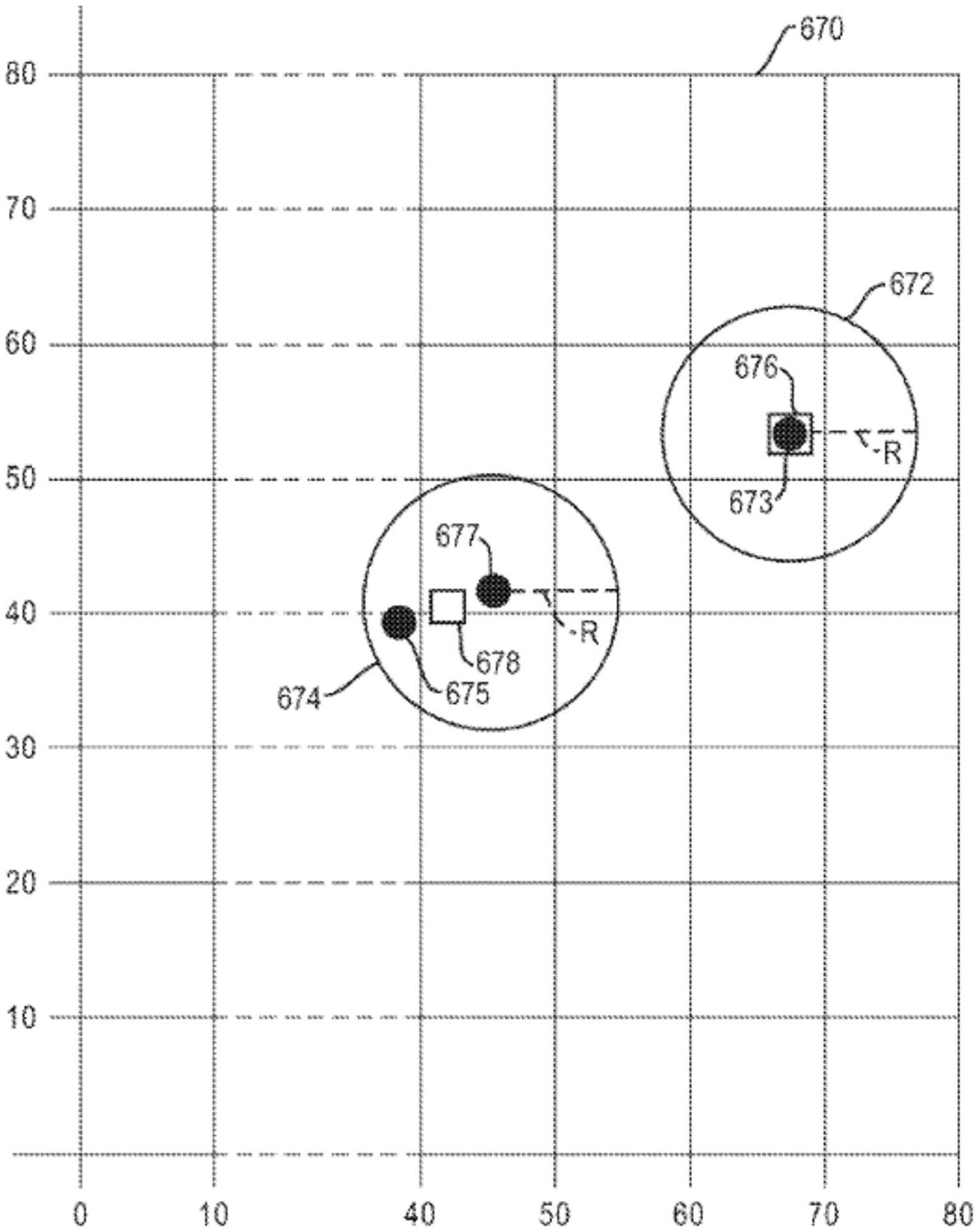
通过下面的发明概述和详细说明,本发明相对于现有系统的好处和优点将显而易 见。本领域的技术人员将理解,可以用除了下面总结或公开的实施例以外的实施例来实践 5 CN 111557013 A 说 明 书 2/13 页 本教导。 在一方面,本发明包括一种用于在仓库管理系统的订单队列中对多个订单进行分 组的方法,每个订单包括一个或多个物品,每个物品与仓库中的物理位置相关联。该方法包 括确定多个订单中每个物品在仓库中的物理位置。对于每个订单,该方法还包括:建立至少 一个集群域,每个集群域包括来自相应订单的至少一个物品;以及基于仓库中的集群域的 物理位置对多个订单进行分组,以形成至少一个订单集。 在本发明的其他方面,可包括以下一个或多个特征。确定所述多个订单中的每个 物品在仓库中的物理位置可包括:在由仓库定义的坐标空间中确定多个订单中每个物品的 二维坐标(x,y)。该确定步骤可包括:从包含与每个所述物品相关联的基准标记的二维坐标 (x,y)的数据结构中检索每个物品的二维坐标(x,y)。该建立步骤包括:对于多个订单中的 每一个的每个物品,确定二维坐标(x,y)是否包含在订单的已建立的集群域中,并且如果 是,将每个这种物品分配给订单的相应集群域;如果二维坐标(x,y)不包含在已经建立的集 群域中,则在相应订单中对于每个这种物品关于二维坐标(x,y)建立一个新集群域。为每个 这种物品建立关于二维坐标(x,y)的新集群域的步骤可包括:对于不包含在已经建立的集 群域中的每个这种物品,关于其二维坐标(x,y)形成一个半径为R的圆,以为相应的订单定 义新集群域。分组的步骤可包括:为每个订单计算每个集群域的位置,并将一个订单中的每 个集群域的位置与至少一个其他多个订单中的对应集群域的位置进行比较。可通过计算相 应集群域中每个物品的二维坐标(x,y)的平均值获得每个集群域的中点位置,以确定多个 订单中的每一个的每个集群域的位置。分组的步骤可进一步包括:建立基本订单,并将基本 订单中每个集群域的中点与其他多个订单中的每一个的相应集群域的中点进行比较,以相 对于其他多个订单的每一个的相应集群域的物理位置确定基本订单中每个集群域的物理 位置。 在本发明的其他方面,可包括以下一个或多个特征。将基本订单中每个集群域的 中点与其他多个订单中的每一个的相应集群域的中点进行比较的步骤可包括:计算基本订 单中每个集群域的中点到其他多个订单中的每一个的相应集群域的中点之间的距离,以及 求和每个计算的距离,以确定基本订单中每个集群域的中点到其他多个订单中的每一个的 相应集群域的中点之间的总距离。分组的步骤进一步包括:根据基本订单中每个集群域的 中点到至少一个其他订单的相应的集群域的中点之间的最小总距离,将基本订单与至少一 个其他订单组合,以形成至少一个订单集。包括将所述至少一个订单集分配给操作员或自 主移动机器人中的一个。操作员和所述自主移动机器人具有订单容量(capacity),并且其 中,组合成所述至少一个订单集的订单数量基于所述操作员和所述自主移动机器人的容 量。分配给操作员或自主移动机器人中的一个的步骤包括将订单集电子传输到操作员的手 持电子设备或自主移动机器人的车载电子设备中的一个。订单可包括拣货订单,放置订单 或维护订单。每个订单能够建立的集群域可具有一个最大数量。为每个订单建立至少一个 集群域的步骤包括将每个集群域与在仓库中按顺序排列的多个区域中的一个相关。集群域 的所述最大数量可对应于仓库中的区域的数量,其中,为每个订单建立至少一个集群域的 步骤可包括基于仓库中多个区域的顺序,从每个订单中选择物品以按顺序建立所述集群 域。 在其他方面,本发明包括一种用于在订单队列中对多个订单进行分组的仓库订单 6 CN 111557013 A 说 明 书 3/13 页 系统,该系统包括存储器,其包括订单队列中的多个订单,每个订单包括一个或多个物品, 并且每个物品与仓库中的物理位置相关联;处理器,配置为:确定多个订单中每个物品在仓 库中的物理位置;对于每个订单,建立至少一个集群域,每个集群域包括来自相应订单的至 少一个物品;以及基于仓库中的集群域的物理位置对多个订单进行分组,以形成至少一个 订单集。 在本发明的其他方面,包括以下一个或多个特征。该处理器可进一步配置为在由 仓库定义的坐标空间中确定多个订单中每个物品的二维坐标(x,y)。该处理器可进一步配 置为从包含与每个所述物品相关联的基准标记的二维坐标(x,y)的数据结构中检索每个物 品的二维坐标(x,y)。该处理器可进一步配置为对于多个订单中的每一个的每个物品,确定 二维坐标(x,y)是否包含在订单的已建立的集群域中,并且如果是,将每个这种物品分配给 订单的相应集群域;如果二维坐标(x,y)不包含在已经建立的集群域中,则在相应订单中对 于每个这种物品建立一个关于二维坐标(x,y)的新集群域。该处理器可进一步配置为对于 不包含在已经建立的集群域中的每个这种物品,关于其二维坐标(x,y)形成一个半径为R的 圆,以为相应的订单定义新集群域。该处理器可进一步配置为为每个订单计算每个集群域 的位置,并将一个订单中的每个集群域的位置与至少一个其他多个订单中的对应集群域的 位置进行比较。该处理器可进一步配置为计算相应集群域中每个物品的二维坐标(x,y)的 平均值,以获得每个集群域的中点位置。该处理器可进一步配置为建立基本订单,并将基本 订单中每个集群域的中点与其他多个订单中的每一个的相应集群域的中点进行比较,以相 对于其他多个订单的每一个的相应集群域的物理位置确定基本订单中每个集群域的物理 位置。 在本发明的其他方面,可包括以下一个或多个特征。该处理器可进一步配置为计 算基本订单中每个集群域的中点到其他多个订单中的每一个的相应集群域的中点之间的 距离,以及求和每个计算的距离,以确定基本订单中每个集群域的中点到其他多个订单中 的每一个的相应集群域的中点之间的总距离。该处理器可进一步配置为根据基本订单中每 个集群域的中点到至少一个其他订单的相应的集群域的中点之间的最小总距离,将基本订 单与至少一个其他订单组合,以形成至少一个订单集。该处理器可进一步配置为将所述至 少一个订单集分配给操作员或自主移动机器人中的一个。操作员和所述自主移动机器人具 有订单容量,并且其中,组合成所述至少一个订单集的订单数量基于所述操作员和所述自 主移动机器人的容量。该处理器进一步配置为将订单集电子传输到操作员的手持电子设备 或自主移动机器人的车载电子设备中的一个。该订单可包括拣货订单,放置订单或维护订 单。每个订单能够建立的集群域可具有一个最大数量。该处理器可进一步配置为将每个集 群域与在仓库中按顺序排列的多个区域中的一个关联。集群域的最大数量可对应于仓库中 的区域的数量,处理器可进一步配置为基于仓库中多个区域的顺序,从每个订单中选择物 品以按顺序建立所述集群域。 根据以下详细描述和附图,本发明的这些和其他特征将显而易见。 附图说明 现在将参考附图仅通过举例的方式描述本发明的实施例,其中: 图1为订单履行仓库的俯视图; 7 CN 111557013 A 说 明 书 4/13 页 图2A为图1所示的仓库中使用的机器人之一的基座的正视图; 图2B为图1所示的仓库中使用的机器人之一的基座的立体图; 图3为图2A和2B中的机器人的立体图,该机器人装配有电枢并停在图1所示的货架 的前面; 图4为使用机器人上的激光雷达创建的图1的仓库的局部图; 图5为描述定位散布在整个仓库中的基准标记和存储基准标记位姿的过程的流程 图; 图6为基准标识到位姿映射的表; 图7是箱子的位置到基准标识映射的表; 图8是描述产品SKU到位姿映射过程的流程图; 图9是描绘根据本发明一方面的集群域的建立的仓库的平面图; 图10是描述根据本发明一方面的部分订单队列的表; 图11是图9的仓库的一部分仓库的平面图,示出了根据本发明的一个方面的集群 域的中点的确定; 图12是描述根据本发明一方面的建立集群域的过程的流程图; 图13示出了与图10的表不同布置的订单1-3的集群域的中点坐标; 图14A是订单1和2的三个集群域中的第一个的视图,以描绘这些集群域中点之间 的距离; 图14B是订单1和2的三个集群域中的第二个的视图,以描绘这些集群域中点之间 的距离; 图14C是订单1和2的三个集群域中的第三个的视图,以描绘这些集群域中点之间 的距离; 图15是根据本发明的一方面的分隔成区域的仓库的一部分的平面图; 图16是三个订单中单个物品以及它们如何映射到图15的仓库中的区域的示意图; 以及 图17是描述根据本发明一方面的订单分组过程的流程图。











