
技术摘要:
本发明提出基于MPC的五轴动梁龙门立式铣床多位姿有限元建模方法,包括以下步骤:S1、以有限元分析软件划分部件,以划分后的部件在有限元分析软件中分别建立各个子结构有限元模型并导出;S2、在同一有限元文件中,把各个子结构有限元模型组装为初始状态的待调整位姿的整 全部
背景技术:
五轴动梁龙门立式铣床是一类高端机床,常用于加工包括轴类、盘类在内的复杂 大型零件,其特点是加工精度高、加工行程大和承载重量大,应用领域包括军事工业、航海 和航空航天等。因为其所加工的零件具有高精度的要求,从而机床结构的静刚度与振动特 性尤为重要,在设计阶段对机床的静动态特性分析必不可少。 随着计算机硬件和数值分析算法的发展,有限元方法已广泛应用于结构静动态特 性分析领域。由于此类机床在加工过程中的静动态特性变化较大,因而需要有限元分析其 工作空间全域位姿。机床在不同位姿下各部件的相对位置与各结合部的接触关系各不相 同,从而每个位姿都要建立单独的有限元模型进行分析,进而人工建模分析机床工作空间 全域位姿的工作量庞大且费时费力。
技术实现要素:
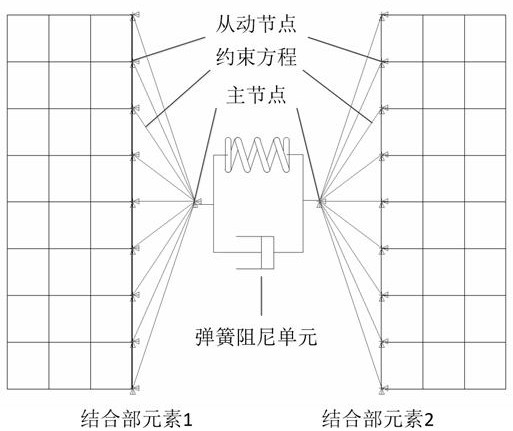
本发明提出基于MPC的五轴动梁龙门立式铣床多位姿有限元建模方法,可以快速 对机床进行计算机建模。 本发明采用以下技术方案。 基于MPC的五轴动梁龙门立式铣床多位姿有限元建模方法,基于多点约束方法,用 于对机床进行有限元建模,所述建模方法包括以下步骤; 步骤S1、以有限元分析软件根据机床的建模部位各个子结构的材料特征和功能特征, 对建模部位的几何模型进行网格划分形成各个部件,以划分后的部件在有限元分析软件中 分别建立各个子结构有限元模型并导出; 步骤S2、在有限元分析软件中,把各个子结构有限元模型导入同一有限元文件,按机床 建模部位的组成,把各个子结构有限元模型组装为初始状态的待调整位姿的整机有限元模 型; 步骤S3、以位姿文件记录目标位姿的位姿参数;所述位姿参数包括机床各部件的位置 及转角; 步骤S4、在有限元分析软件中,根据步骤S3中输入的位姿参数建立各部件在目标位姿 下的局部坐标系Cn’,并将各部件由对应初始坐标系Cn0移动至对应局部坐标系Cn’,此过程 需使移动之前部件中各节点在初始坐标系Cn0中的坐标值与移动之后其在对应局部坐标系 Cn’中的坐标值相同; 步骤S5、在有限元分析软件中,在两部件的结合部处,在结合部元素的几何中心均建立 主节点,在有限元分析软件中,每个主节点必须从属于一个子结构有限元模型; 步骤S6、在每个结合部中,选取单个部件的结合部元素上所有的节点作为从动节点,选 4 CN 111581745 A 说 明 书 2/5 页 取步骤S5中建立的对应主节点作为主动节点,分别创建两组多点约束方程; 步骤S7、在每个结合部中,选取两组多点约束方程中的主动节点作为弹簧阻尼单元的 受力端,创建一弹簧阻尼单元,并把该弹簧阻尼单元的刚度阻尼值作为此结合部的等效刚 度阻尼值。 在步骤S4中,初始坐标系Cn0与对应局部坐标系Cn’为相同种类的坐标系。 在步骤S7中,当结合部为直线滚动导轨结合部时,通过弹簧阻尼单元设置其法向、 切向和三个偏转方向的刚度阻尼,将移动方向的刚度阻尼设为零; 当结合部为滚动轴承结合部时,通过弹簧阻尼单元设置其径向、轴向与两个偏转方向 的刚度阻尼,将转动方向的刚度阻尼设为零; 当结合部为滚珠丝杠结合部时,通过弹簧阻尼单元设置其径向、轴向与三个旋转方向 的刚度阻尼。 步骤S4至步骤S7的方法均采用编程语言实现; 在步骤S1中,网格划分部件时,可选择的网格单元种类包括四面体实体单元与六面体 实体单元,可选择的网格划分方法包括映射网格划分、扫掠网格划分、自由网格划分中的一 种或多种。 所述编程语言为基于ANSYS APDL有限元分析软件的ANSYS APDL编程语言,或是基 于具备二次开发功能的通用有限元软件的编程语言; 步骤S2中组装完成的初始的整机有限元模型经保存后可重复调用,当需自动化地建立 任意特定目标位姿下的整机有限元模型,可通过在位姿文件中输入目标位姿下机床各部件 的位置及转角来实现。 所述机床为五轴动梁龙门立式铣床;所述机床建模部位为铣床的龙门部分; 所述五轴动梁龙门立式铣床由顶梁(1)、动梁(2)、立柱(3)、工作台(4)、工作台底座 (5)、导轨(6)、摆铣头(7)7、滑枕(8)和溜板(9)组成; 铣床工作时,动梁参与数控进给,在加工过程中滑枕通过保持伸出长度不变来实现等 刚度切削; 所述机床建模部位的结合部包括立柱与动梁间的直线滚动导轨结合部、动梁与溜板间 直线滚动导轨结合部、溜板与滑枕间的直线滚动导轨结合部,还包括摆铣头中滚动轴承结 合部、立柱与动梁间的滚珠丝杠结合部,还包括溜板与滑枕间的滚珠丝杠结合部。 在步骤S1中,在ANSYS APDL有限元分析软件中设置材料特征的材料参数,以及各 个子结构的功能特征和单元类型,使用自由划分方法对机床各子结构几何模型进行网格划 分,将各子结构有限元模型的节点和单元设置为组件(COMPONENT)并使用CDWRITE,DB命令 将有限元模型与几何模型分离; 在步骤S2中,将各子结构有限元模型导入同一有限元文件cdb,并连接机床中所有的固 定结合部,固定结合部中的螺栓连接结合部用弹簧阻尼单元MATRIX27相连接,组装为初始 的待调整位姿的整机有限元模型; 在步骤S3中,在位姿文件中输入所需加工位姿下的机床各部件的位置坐标及转角; 在步骤S4中,使用transfer命令将各部件由对应初始坐标系Cn0移动至对应局部坐标 系Cn’,移动之前部件中各节点在初始坐标系Cn0中的坐标值与移动之后其在对应局部坐标 系Cn’中的坐标值相同; 5 CN 111581745 A 说 明 书 3/5 页 在步骤S5中,在建立主节点时,在每个结合部中结合部元素的几何中心建立两个重叠 的MASS21单元作为主节点,赋予此单元三个转动与三个移动自由度,并将其各向质量与转 动惯量设为零; 在步骤S6中,选取单个结合部元素上所有的节点作为从动节点,选取步骤S5中建立的 对应主节点作为主动节点,运用RBE3单元分别创建两组多点约束方程; 在步骤S7中;在每个结合部中,选取两组多点约束方程中的主动节点,创建弹簧阻尼单 元MATRIX27,赋予其此结合部的等效刚度阻尼值;其中对于直线滚动导轨结合部,设置其法 向、切向和三个偏转方向的刚度阻尼,将移动方向的刚度阻尼设为零;对于滚动轴承结合 部,设置其径向、轴向与两个偏转方向的刚度阻尼,将转动方向的刚度阻尼设为零;而对于 滚珠丝杠结合部,设置其径向、轴向与三个旋转方向的刚度阻尼。 本发明的有益效果在于:基于MPC(multipoint constraints)方法,利用多点约束 方程建立结合部,实现了机床工作空间中任意位姿下有限元模型的自动生成;当设计人员 输入了任意位姿文件时,即可自动生成机床工作空间中对应位姿下的有限元模型,降低了 人工重复建模的工作量,实现五轴动梁龙门立式铣床工作空间全域位姿静动态特性的高效 分析。 附图说明 下面结合附图和











