
技术摘要:
本发明公开的属于机器人技术领域,具体为一种基于6轴机器人抓举胀管平口一体机,包括机器人本体、底板、三维激光测量相机和胀管平口一体机,所述底板上侧安装有机器人本体,所述控制箱固定连接于底板上侧,所述控制箱上侧通过螺钉连接有固定座,所述固定座上侧转动连接 全部
背景技术:
机器人是自动执行工作的机器装置,包括一切模拟人类行为或思想与模拟其他生 物的机械。狭义上对机器人的定义还有很多分类法及争议,有些计算机程序甚至也被称为 机器人。在当代工业中,机器人指能自动运行任务的人造机器设备,用以取代或协助人类工 作,一般会是机电设备,由计算机程序或是电子电路控制。一些管子使用时需要进行进行胀 管和平口,增强管子的抗压能力。 现有的管子平口方式大多是人工操作,操作人员拉动平口工具,对准待加工零件 中心孔,插入定位,右手紧握平口工具握把,扣动气动扳机,平口刀具顺时针旋转,左手向前 推动进给杠杆,使平口刀向前移动,完成切削加工,此种方法的缺点是工具接触式支点太 少,由于工具在生产过程中是顺时针旋转,进给速度不稳定,操作人员要用人力抵消工具在 切削中产生的震动和旋转反作用力,长时间工作体力消耗很大,中途需要适当休息,工作效 率不高。
技术实现要素:
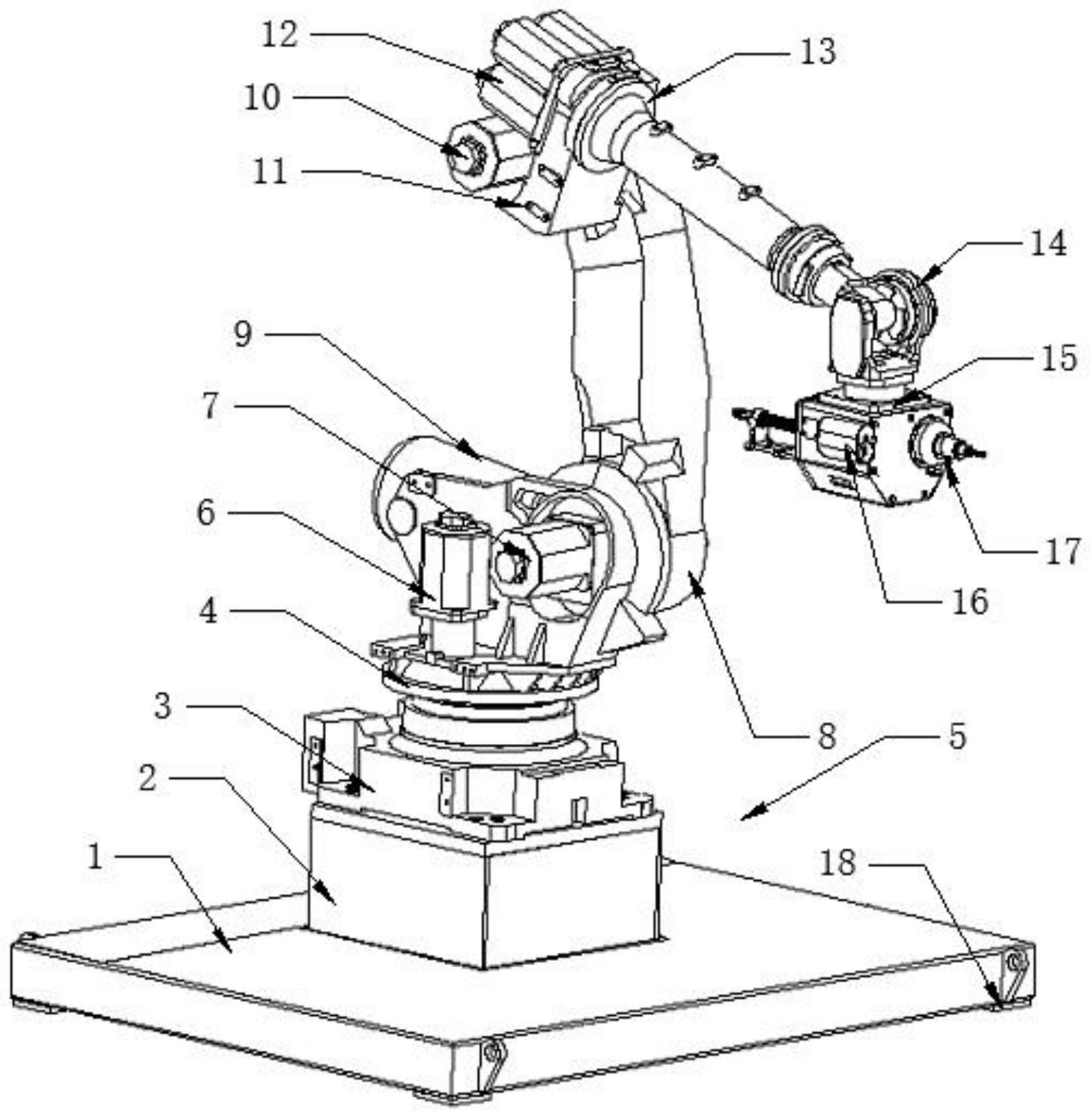
本发明的目的在于提供一种基于6轴机器人抓举胀管平口一体机,以解决上述背 景技术中提出的现有的管子平口方式大多是人工操作,长时间工作体力消耗很大,中途需 要适当休息,工作效率不高的问题。 为实现上述目的,本发明提供如下技术方案:一种基于6轴机器人抓举胀管平口一 体机,包括机器人本体、底板、三维激光测量相机和胀管平口一体机,所述底板上侧安装有 机器人本体,所述机器人本体包括控制箱、固定座、转动座、第一电机、固定板、第二电机、转 动臂、连接座、第三电机、第四电机、转动杆、第一转动机构和第二转动机构,所述控制箱固 定连接于底板上侧,所述控制箱上侧通过螺钉连接有固定座,所述固定座上侧转动连接有 转动座,所述转动座上侧通过螺钉连接有第一电机,所述第一电机输出轴与转动座中部固 定连接,所述转动座上侧通过螺钉连接有固定板,所述固定板右侧转动连接有转动臂,所述 固定板左侧通过螺钉连接有第二电机,所述第二电机输出轴与转动臂固定连接,所述转动 臂上侧转动连接有连接座,所述连接座左侧通过螺钉连接有第三电机,所述第三电机输出 轴与连接座固定连接,所述连接座前侧转动连接有转动杆,所述连接座后侧通过螺钉连接 有第四电机,所述第四电机输出轴与转动杆后侧中部固定连接,所述转动杆前侧转动连接 有第一转动机构,所述第一转动机构下端转动连接有第二转动机构,所述第二转动机构中 部通过螺栓连接有三维激光测量相机,所述第二转动机构前侧通过螺栓连接胀管平口一体 机。 优选的,所述底板下端固定连接有底垫。 优选的,所述底垫为橡胶底垫。 3 CN 111590606 A 说 明 书 2/3 页 优选的,所述第一电机、第二电机、第三电机和第四电机均为伺服电机。 优选的,所述第四电机与转动杆同轴设置。 与现有技术相比,本发明的有益效果是: 1)通过三维激光测量相机识别待加工管子的圆心和管伸出量,计算出需要加工深 度,三维激光测量相机将信号传递给机器人本体,由机器人本体来执行空间坐标移动,通过 机器人本体带动胀管平口一体机移动,对管子进行胀管或平口,避免了人工操作,提高工作 效率; 2)通过第一电机、第二电机、第三电机、第四电机、第一转动机构和第二转动机构 的设置,使机器人本体能够带动胀管平口一体机移动到所需要的工作位置; 3)通过底垫的设置,便于平稳摆放设备。 附图说明 图1为本发明结构示意图。 图中:1底板、2控制箱、3固定座、4转动座、5机器人本体、6第一电机、7第二电机、8 转动臂、9固定板、10第三电机、11连接座、12第四电机、13转动杆、14第一转动机构、15第二 转动机构、16三维激光测量相机、17胀管平口一体机、18底垫。











