
技术摘要:
本发明涉及一种基于海量数据的单木点云编辑方法及系统,所述单木点云编辑方法包括:在点云渲染窗口中确定一待编辑区域,并将该待编辑区域内的数据生成内存区域点云数据块;对生成的所述内存区域点云数据块内的数据进行编辑操作,在完成所有编辑后再根据所述内存区域点 全部
背景技术:
在对森林进行巡检勘测过程中,通过森林资源普查树木的空间位置及形态参数, 确定树木的生长数量,并依据树木的形态参数评估树木的健康状态是评估生态系统的一项 重要工作。近年来,随着人工智能、大数据的发展,在数字化领域构建森林环境进行研究越 来越普遍,也取得了一定的成就。在采集获取到海量数据的单木点云数据后,需要对其进行 编辑处理;且由于树木具有复杂而又特殊的拓扑结构,树枝与树叶之间存在大量的相互遮 挡;因此需要对海量树木数据进行分割处理;但是再实际处理过程中存在的问题有:1、海量 数据点云编辑因为数据量庞大,无法全部显示到内存中;2、难以确认哪些区域需要重新分 割;3、海量数据点云引起的数据编辑速度慢、效率低下、占用内存大、且容易造成系统卡顿 甚至引起系统崩溃;4、数据编辑过程中一直与文件进行交互,无形中又占用了系统资源,数 据频繁的通过I/O口进行交互也会引起机器卡顿,降低用户的体验感。 申请号为CN201910295160.6的中国专利申请公布了“一种森林生物量估算方法及 其系统”,所述方法包括步骤:获取待测区域的森林参数计算出样点的森林生物量;获取 LiDAR点云数据,并对所述LiDAR点云数据进行分离,根据所述地面点生成数字高程模型;对 所述LiDAR点云数据进行归一化处理,得到归一化的LiDAR点云数据;将所述归一化的LiDAR 点云数据转为预定分辨率的栅格数据,得到树木高度栅格数据;根据所述多光谱数据计算 出该区域的植被指数分布数据;将所述森林生物量与树木高度栅格数据以及植被指数分布 数据采用生物量回归公式估算出待测区域的森林生物量。本发明综合了无人机多光谱数据 的光谱信息和无人机LiDAR数据的森林三维结构信息,利用实测点的真实数据进行反演估 算,大大提高了反演的精度。 申请号为CN201810538163.3的中国专利申请公布不了“一种预测大面积亚热带森 林生物量的混合效应模型”,该技术主要由激光雷达数据特征变量的提取、地面样地数据树 干材积估算、基于植被类型的模型构建与模型验证、基于树干材积和生物量相对生长模型 的生物量计算五个阶段构成。该技术提升了激光雷达方法在大尺度森林的生物量估算精 度,为机载激光雷达在大面积亚热带森林的林业勘察应用中提供简化的技术解决方案。 上述技术方案都只是解决如何提高森林生物量的估算精度,并不能解决在对海量 数据的单木点云编辑过程中存在的问题;因此,如何在海量数据的单木点云的处理过程中 解决现有存在的缺陷,现阶段需要解决的问题。
技术实现要素:
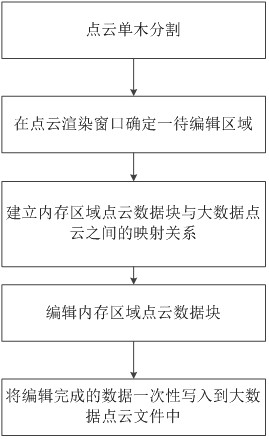
本发明的目的在于克服现有技术的缺点,提供了一种基于海量数据的单木点云编 辑方法及系统,解决了目前在海量数据的单木点云编辑处理过程中存在的问题。 4 CN 111553987 A 说 明 书 2/7 页 本发明的目的通过以下技术方案来实现:一种基于海量数据的单木点云编辑方 法,所述单木点云编辑方法包括: 在点云渲染窗口中确定一待编辑区域,并将该待编辑区域内的数据生成内存区域点云 数据块; 对生成的所述内存区域点云数据块内的数据进行编辑操作,在完成所有编辑后再根据 所述内存区域点云数据块与大数据点云之间的关系将内存区域点云数据块内的数据一次 性交互的写入到大数据点云文件中。 进一步地,所述确定一待编辑区域包括以下内容: 在点云渲染窗口中通过鼠标拾取多个点的坐标,并通过求交算法计算出相应点的世界 坐标; 与大数据点云的世界坐标进行运算,计算出相交点集;由所述相交点集合构成一个多 边形区域。 进一步地,所述将该待编辑区域内的数据生成内存区域点云数据块包括以下内 容: 将构成所述多边形区域内的点构成一个内存区域点云,构建拓扑关系形成内存区域点 云数据块;并建立所述内存区域点云数据块中的点在所述大数据点云中的映射关系,得到 所述内存区域点云数据块中所有点到所述大数据点云的写入路径。 进一步地,所述单木点云编辑方法还包括:建立一个剖面窗口,在生成所述内存区 域点云数据块后将所述内存区域点云数据块中的数据链接入所述剖面窗口中显示,所述大 数据点云通过主窗口显示。 对内存区域点云数据块内的数据进行编辑操作包括:创建单木、合并单木和删除 单木的操作。 进一步地,所述创建单木包括在所述内存区域点云数据块内随机或者有条件选择 一块数据,通过树ID分配算法为这块数据分配一个树ID; 所述合并单木包括将多个单木的树ID合并为一个单木的树ID; 所述删除单木包括在所述内存区域点云数据块内选择一单木,并将该单木的树ID修改 为0。 进一步地,所述单木点云编辑方法还包括在确定所述一待编辑区域之前还需要对 点云单木进行分割,其包括如下内容: 基于地基激光雷达扫描获取的点云数据构建数字高程模型; 基于所述数字高程模型对点云数据进行归一化,在归一化的点云数据中提取预定高度 胸径的点云数据,基于提取的点云数据获取所述胸径的圆心位置; 依据所述胸径的圆心位置以及设定的聚类算法进行单木分割。 本发明还包括一种基于海量数据的单木点云编辑系统,所述系统包括:单木分割 模块、编辑区域内存块生成模块、编辑模块和映射关系存储模块; 所述单木分割模块,用于根据聚类算法对单木进行分割,得到高精度的单木分割数据; 所述编辑区域内存块生成模块,用于在点云渲染窗口中确定一待编辑区域,并将该待 编辑区域内的数据生成内存区域点云数据块; 所述编辑模块,用于对生成的所述内存区域点云数据块内的数据进行创建单木、合并 5 CN 111553987 A 说 明 书 3/7 页 单木和删除单木的编辑操作; 所述映射关系存储模块,用于在完成所有编辑后根据所述内存区域点云数据块与大数 据点云之间的映射关系将内存区域点云数据块内的数据一次性交互的写入到大数据点云 文件中。 进一步地,所述编辑区域内存块生成模块包括编辑区域确定单元和内存区域点云 数据块生成单元; 所述编辑区域确定单元,用于在点云渲染窗口中通过鼠标拾取多个点的坐标,并通过 求交算法计算出相应点的世界坐标;与大数据点云的世界坐标进行运算,计算出相交点集; 由所述相交点集合构成一个多边形区域; 所述内存区域点云数据块生成单元,用于将构成所述多边形区域内的点构成一个内存 区域点云,构建拓扑关系形成内存区域点云数据块;并建立所述内存区域点云数据块中的 点在所述大数据点云中的映射关系,得到所述内存区域点云数据块中所有点到所述大数据 点云的写入路径。 进一步地,所述单木分割模块包括模型构建单元、圆心位置确定单元以及分割单 元; 所述模型构建单元,用于基于地基激光雷达扫描获取的点云数据构建数字高程模型; 所述圆心位置确定单元,用于基于所述数字高程模型对点云数据进行归一化,在归一 化的点云数据中提取预定高度胸径的点云数据,基于提取的点云数据获取所述胸径的圆心 位置; 所述分割单元,用于依据所述胸径的圆心位置以及设定的聚类算法进行单木分割。 本发明具有以下优点在于:本发明提供了一种基于海量数据的单木点云编辑方法 及系统,采用内存区域点云数据块编辑数据,编辑完成之后将内存区域点云数据块的数据 一次性写入到大数据点云文件中,解决了传统的大数据点云编辑过程中一直频繁通过I/O 接口与文件进行交互引起系统或者机器卡顿,以及降低用户体验度的问题;将内存区域点 云数据块的数据通过建立剖面窗口进行显示,不再针对所有点云全部进行加载显示,从海 量数据转换为小数据编辑区域内的编辑处理,大大地降低了待编辑点云的数据量,解决了 海量点云数据引起的数据编辑速度慢、效率低下、占用内存大,容易造成系统卡顿甚至崩溃 的问题;通过在确定需要编辑的内存区域点云数据块之前进行单木分割处理,提高了单木 分割的精确度,能够快速有效地确定待编辑区域。 附图说明 图1 为本发明方法的流程示意图; 图2 为本发明确定待编辑区域的流程示意图; 图3为本发明生成内存区域点云数据块的流程示意图; 图4为本发明点云单木分割的流程示意图。











