
技术摘要:
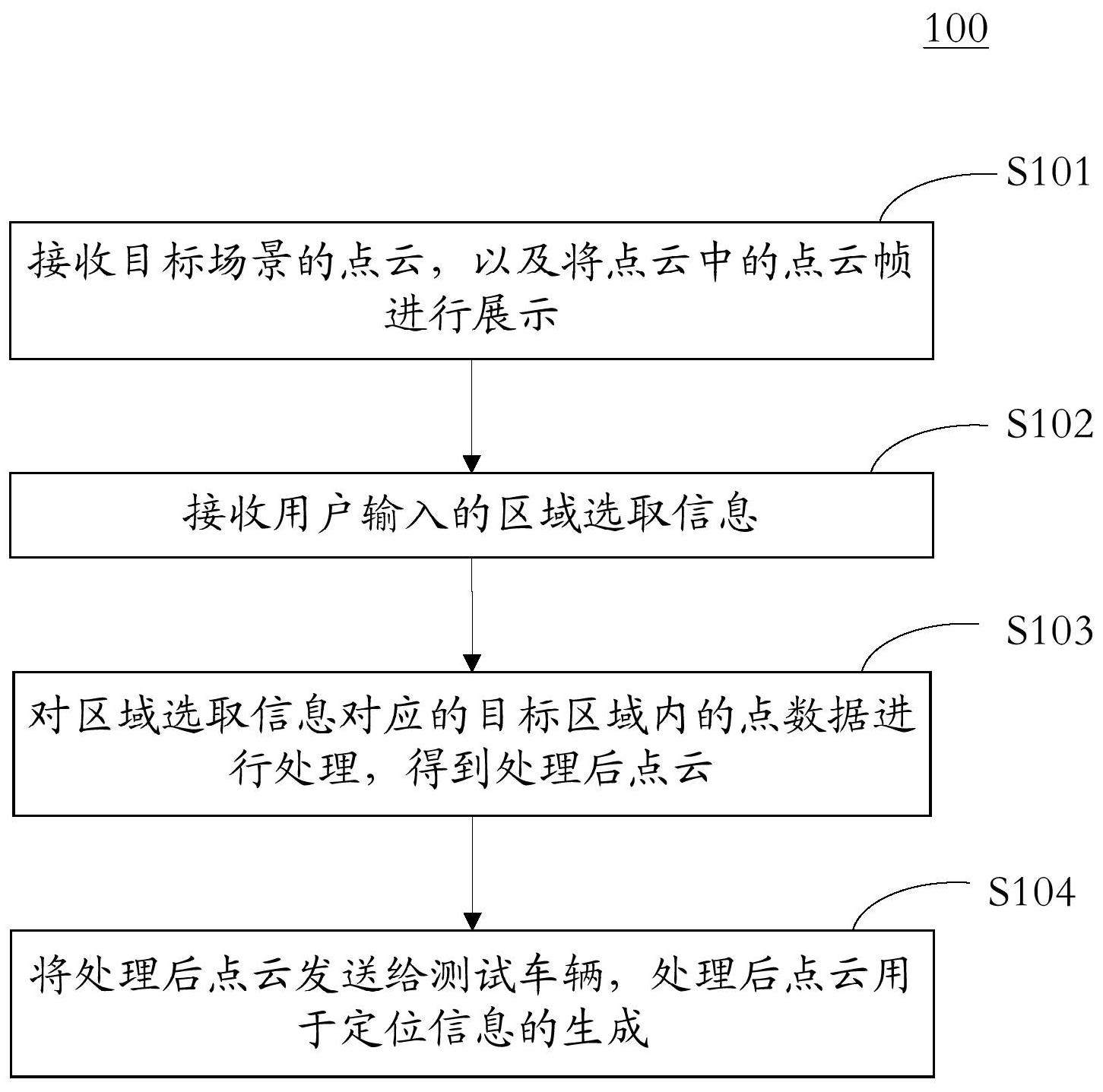
本申请公开用于生成信息的方法和装置,涉及自动驾驶领域。具体实现方案为:接收目标场景的点云,以及将上述点云中的点云帧进行展示;接收用户输入的区域选取信息,其中,上述区域选取信息是上述用户基于所展示的点云帧发送的;对上述区域选取信息对应的目标区域内的点 全部
背景技术:
现阶段,自动驾驶中的定位系统可以采用多传感器融合方法进行高精度定位。利 用各类传感器的优势互补及冗余备份,使自动驾驶车辆获得高精度及强鲁棒性的定位结 果。其中,强依赖激光雷达及使用其数据事先制作的高精度定位地图进行定位,以保证车辆 在GNSS(Global Navigation Satellite System,全球导航卫星系统)信号较差的情况下定 位精度。这种定位方法主要依赖激光雷达的高精度数据提前制作物理世界的反射值地图, 车辆在自动驾驶模式下加载该地图,并与实时采集的激光雷达数据进行匹配,从而获得高 精度的位置信息。由于高精度定位地图的采集制作成本较高及制图周期较长,目前还无法 做到实时更新地图,所以定位地图存在一定的滞后性,这就给使用地图匹配的定位方法带 来一定风险。当环境变化时,车辆实时采集的点云数据与之前在环境未发生变化时采集的 地图数据无法完好匹配,可能会导致定位出现误差。如何有效地测试定位系统在这种情况 下的效果表现在无人车测试过程中极为重要,测试可以验证定位系统支持何种程度的环境 变化及在何种程度的环境变化下可能存在风险。而想要在道路上构造环境变化的实际场景 是非常困难的,不仅可能会影响交通,而且违反交通法规,所以只有遇到这一类场景后才能 进行特定环境变化场景的验证,这样测试效率及测试覆盖都非常低,并且无法控制与预测。
技术实现要素:
提供了一种用于生成信息的方法、装置、设备以及存储介质。 根据第一方面,提供了一种用于生成信息的方法,该方法包括:接收目标场景的点 云,以及将上述点云中的点云帧进行展示;接收用户输入的区域选取信息,其中,上述区域 选取信息是上述用户基于所展示的点云帧发送的;对上述区域选取信息对应的目标区域内 的点数据进行处理,得到处理后点云;将上述处理后点云发送给测试车辆,上述处理后点云 用于定位信息的生成。 根据第二方面,提供了一种用于生成信息的装置,该装置包括:展示单元,被配置 成接收目标场景的点云,以及将上述点云中的点云帧进行展示;接收单元,被配置成接收用 户输入的区域选取信息,其中,上述区域选取信息是上述用户基于所展示的点云帧发送的; 处理单元,被配置成对上述区域选取信息对应的目标区域内的点数据进行处理,得到处理 后点云;发送单元,被配置成将上述处理后点云发送给测试车辆,上述处理后点云用于定位 信息的生成。 根据第三方面,提供了一种电子设备,该电子设备包括:至少一个处理器;以及与 上述至少一个处理器通信连接的存储器;其中,上述存储器存储有可被上述至少一个处理 器执行的指令,上述指令被上述至少一个处理器执行,以使上述至少一个处理器能够执行 4 CN 111578951 A 说 明 书 2/8 页 如第一方面中任一项上述的方法。 根据第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,上 述计算机指令用于使上述计算机执行权利要求1-5中任一项上述的方法。 根据本申请的技术通过将从真实物理场景采集的点云进行处理,来模拟真实物理 环境的环境变化,并将处理后点云发送给测试车辆,处理后点云用于定位信息的生成,从而 实现了对测试车辆的定位系统的稳定性测试。 应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特 征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。 附图说明 附图用于更好地理解本方案,不构成对本申请的限定。其中: 图1是根据本申请的用于生成信息的方法的一个实施例的流程图; 图2是根据本申请的用于生成信息的方法的一个应用场景的示意图; 图3是根据本申请的用于生成信息的方法的又一个实施例的流程图; 图4是根据本申请的用于生成信息的方法的又一个实施例的流程图; 图5是根据本申请的用于生成信息的装置的一个实施例的结构示意图; 图6是用来实现本申请实施例的用于生成信息的方法的电子设备的框图。











