
技术摘要:
本发明属于爬壁机器人技术领域,尤其涉及一种曲面自适应水下爬壁机器人,其包括机架、摆臂机构、吸附行走机构和两个驱动机构,摆臂机构安装于机架顶部前侧,吸附行走机构包括两个主动轮、两个磁吸附单元和两个辅助磁轮,两个辅助磁轮分别安装于机架底部前侧和后侧,两 全部
背景技术:
船舶的清洗、除锈是船舶维护中的关键问题,现今较为成熟的方式是由工作人员 佩戴设备进入水下环境或船舶进坞后通过手持清洗设备进行清洗,但这种人工作业方式效 率低下、周期时间长、对工人的身心负担重,并且由于船坞数量的限制,无法多船同时进行 作业。采用爬壁机器人搭载清洗装置执行作业,将高压水无损清洗工艺、实时监控系统和爬 壁机器人三者有机结合起来,清洗效率高、操作方便,大幅节省了工人劳动力。国外已有船 厂开始应用爬壁机器人,但基本都是用于水上环境,并且大都结构复杂、运行笨重、负载能 力低下。常见的爬壁机器人吸附方式有真空吸附、推力吸附、磁力吸附和静电吸附等,其中 磁力吸附又分为永磁吸附和电磁吸附两种,电磁吸附式爬壁机器人结构复杂,安全性较差, 因此应用较少。 专利《一种轮式磁吸附爬壁机器人》(申请号:201610364096.9)中提出了一种永磁 轮式爬壁机器人,该机器人结构较轻便、运动灵活,通过摄像头和测距传感器,可实现自主 避障,但其机体与壁面距离小,曲面适应力弱,负载能力低,只适用于大平面的检测作业。专 利《一种履带式爬壁机器人》(申请号:201610350206.6)提出了一种履带式爬壁机器人,该 机器人通过设置了舵机的磁吸附结构,可以实现磁场分布状态的转换,便于机器人的上下 墙,并且吸附牢靠、负载能力较强,但该机器人结构较复杂,曲面适应力、越障能力差,在船 舶壁面工作环境下的应用有限。专利《一种多腔吸附的轮腿结合式爬壁机器人》(申请号: 201710103129.9)提出了一种轮腿结合式爬壁机器人,该机器人采用负压吸附方式,设置了 一个越障臂来配合机器人运动,提高了机器人的越障能力,但真空吸附方式对壁面要求高, 易破真空,吸附不够稳定,并且该结构的曲面适应力也不够。 然而,船舶壁面清洗设备具有一定的重量,工作时会产生较大的反冲力,同时船体 表面是个多曲率、多障碍的曲面,这就要求爬壁机器人具有多方面的特性。国内外现有的爬 壁机器人一般用于水上平面环境,由于磁吸附单元的结构和磁力分布的限制,普遍存在结 构复杂笨重、灵活性差,负载能力、越障能力和曲面适应力无法兼顾的缺点,因此在船舶壁 面维护作业上的作用有限。
技术实现要素:
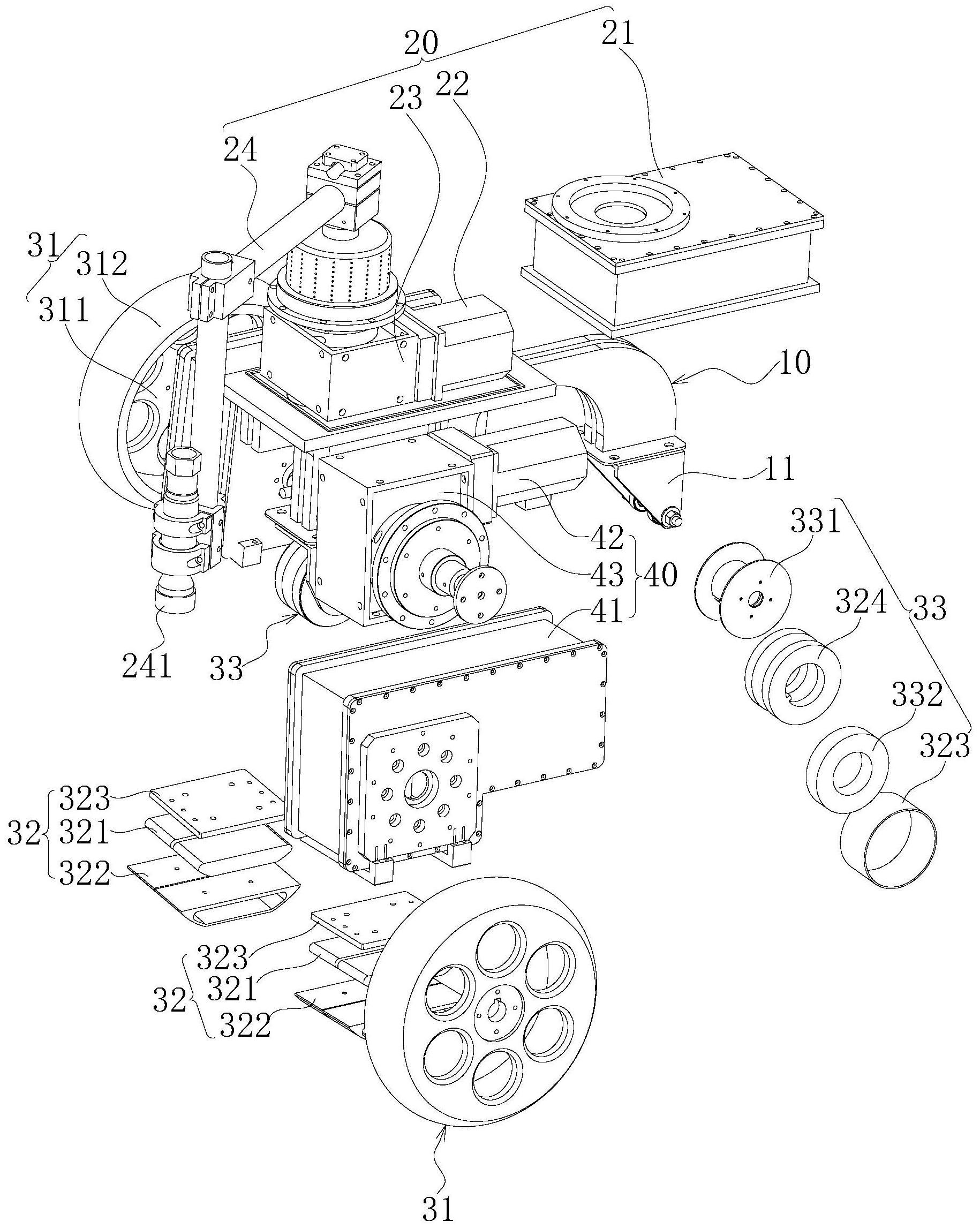
本发明的目的在于提供一种曲面自适应水下爬壁机器人,旨在解决现有技术中应 用于水下船舶的爬壁机器人存在结构复杂笨重、灵活性差,负载能力、越障能力和曲面适应 力无法兼顾的技术问题。 为实现上述目的,本发明实施例提供的一种曲面自适应水下爬壁机器人,包括机 架、摆臂机构、吸附行走机构和两个驱动机构,所述摆臂机构安装于所述机架顶部前侧的位 置,所述吸附行走机构包括两个主动轮、两个磁吸附单元和两个辅助磁轮,两个所述辅助磁 4 CN 111572725 A 说 明 书 2/6 页 轮分别安装于所述机架底部前侧和后侧的位置,两个所述驱动机构通过两个铰接机构分别 铰接于所述机架前端的两侧,两个所述磁吸附单元分别安装于两个所述驱动机构的底部, 两个所述主动轮分别与两个所述驱动机构的输出端连接,且两个所述主动轮底部的水平位 置均低于所述磁吸附单元底部的水平位置。 可选地,所述铰接机构包括连接轴、铰接座和铰接轴,所述铰接座与所述机架的侧 部连接,且所述铰接座的端部设置有轴线沿水平方向延伸的铰接孔,所述连接轴与所述驱 动机构的侧部连接,且所述连接轴设置有轴线沿水平方向延伸的轴孔,所述铰接轴穿过所 述铰接孔和所述轴孔并将所述铰接座与所述连接轴铰接。 可选地,各所述主动轮均包括第一轮毂和包覆于所述第一轮毂上外圆周的橡胶 皮,所述第一轮毂与所述驱动机构的输出端连接。 可选地,所述橡胶皮的表面设置有摩擦花纹。 可选地,所述磁吸附单元包括异形钕铁硼永磁体、磁铁保护套和导磁轭铁块,所述 导磁轭铁块固定于所述驱动机构的底部,所述磁铁保护套套接于所述异形钕铁硼永磁体之 外,所述异形钕铁硼永磁体固定于所述导磁轭铁块的底部,且所述异形钕铁硼永磁体的底 部的水平位置高于所述主动轮的底部的水平位置。 可选地,所述辅助磁轮包括第二轮毂、环形钕铁硼永磁体、尼龙套和环形轭铁块, 所述第二轮毂可转动地安装于所述机架的底部,所述环形轭铁块安装于所述第二轮毂上, 所述尼龙套套接于所述环形钕铁硼永磁体之外,所述环形钕铁硼永磁体固定于所述环形轭 铁块的内侧。 可选地,所述机架的底部设置有万向轮架,所述辅助磁轮安装于所述万向轮架上。 可选地,所述驱动机构包括第一密封壳以及设置于所述第一密封壳密内的第一电 机和第一减速器,所述第一密封壳通过所述铰接机构铰接于所述机架的侧部,所述第一电 机的主轴与所述第一减速器的输入孔连接,所述第一减速器的输出轴伸出所述第一密封壳 之外并与相邻的一个所述主动轮连接。 可选地,所述摆臂机构包括第二密封壳、第二电机、第二减速器和摆臂,所述第二 密封壳安装于所述机架顶部前侧的位置,所述第二电机和所述第二减速器均设置于所述第 二密封壳内,所述第二电机的主轴与所述第二减速器的输入孔连接,所述第二减速器的输 出轴伸出所述第二密封壳之外,所述摆臂与所述第二减速器的输出轴连接。 可选地,所述摆臂的末端安装有自旋转喷嘴。 本发明实施例提供的曲面自适应水下爬壁机器人中的上述一个或多个技术方案 至少具有如下技术效果之一:机器人的吸附行走机构设置了左右两个驱动机构,通过每个 驱动机构分别驱动一个主动轮,两个主动轮与两个辅助磁轮配合实现整个机器人的行走, 并且驱动机构的下方安装有磁吸附单元,磁吸附单元与壁面形成一定间距,这样,在该磁吸 附单元的作用下,可以使得主动轮能够紧密贴合壁面;同时,设置的铰接机构使得左右两侧 驱动机构可以随壁面的情况形成一定角度的摆幅,这样,与两个驱动机构连接的两个主动 轮也可以随壁面的情况形成一定角度的摆幅;当机器人行走至不同曲率的壁面上时,两侧 的主动轮会随壁面起伏而绕着铰接机构摆动,使主动轮、辅助磁轮与壁面紧密贴合,磁吸附 单元和壁面之间的间隙不会发生明显变化,保证机器人稳定吸附行走,不会发生倾覆危险, 从而使机器人具有曲面自适应能力,进而可以使得机器人在各种壁面的维护作业上更加灵 5 CN 111572725 A 说 明 书 3/6 页 活。 本发明实施例提供的曲面自适应水下爬壁机器人,适用于水下对船舶执行工作, 其具有结构简单轻巧、灵活性好,负载能强以及兼顾越障能力和曲面适应力的优点。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述 中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些 实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些 附图获得其他的附图。 图1为本发明实施例提供的曲面自适应水下爬壁机器人的结构示意图。 图2为图1中的曲面自适应水下爬壁机器人的另一视角的剖切视图。 图3为图1中的曲面自适应水下爬壁机器人的侧视图。 图4为图1中的曲面自适应水下爬壁机器人的结构分解示意图。 图5为图1中的曲面自适应水下爬壁机器人在一种曲面上行走时的结构示意图。 图6为图1中的曲面自适应水下爬壁机器人在另一种曲面上行走时的结构示意图。 图7为本发明实施例提供的曲面自适应水下爬壁机器人的局部结构示意图。 其中,图中各附图标记: 10—机架 11—万向轮架 20—摆臂机构 21—第二密封壳 22—第二电机 23—第二减速器 24—摆臂 30—吸附行走机构 31—主动轮 32—磁吸附单元 33—辅助磁轮 40—驱动机构 41—第一密封壳 42—第一电机 43—第一减速器 50—铰接机构 51—连接轴 52—铰接座 53—铰接轴 241—自旋转喷嘴 311—第一轮毂 312—橡胶皮 321—异形钕铁硼永磁体 322—磁铁保护套 323—导磁轭铁块 331—第二轮毂 332—环形钕铁硼永磁体 333—尼龙套 334—环形轭铁块。











