
技术摘要:
本申请提供了前景区域获取方法、装置、电子设备和存储介质,涉及图像处理领域。本申请所提供的前景区域获取方法,采用分割边框的重合度先将各个前景提取结果进行了归类,而后再将同一类的前景提取结果中的第一前景区域进行了融合。由于分割边框是规则图形,因此使用分 全部
背景技术:
近些年,随着神经网络技术的快速进步,神经网络技术已经应用到了各个领域中, 比如面部识别技术、车牌识别技术、前景提取技术中都有使用到神经网络技术。 前景提取技术在使用前,首先要完成对前景提取神经网络的训练。通常情况下,为 了提高前景提取的准确度,技术人员会准备大量的训练样本来训练前景提取神经网络。训 练对前景提取神经网络所使用的训练样本越多,则前景提取神经网络的识别精度就越高。
技术实现要素:
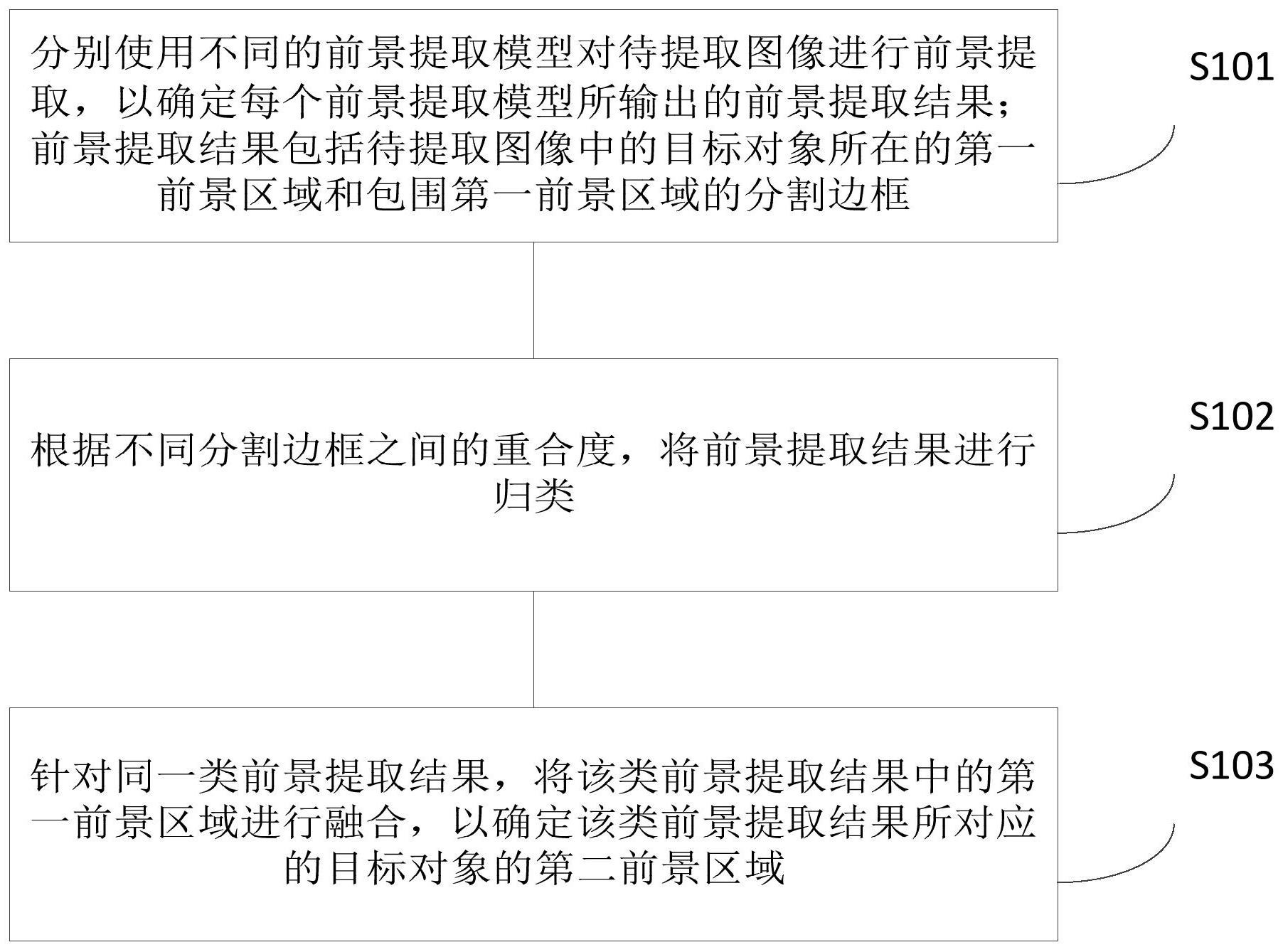
本申请的目的在于提供前景区域获取方法、装置、电子设备和存储介质。 本申请提供了一种前景区域获取方法,包括: 分别使用不同的前景提取模型对待提取图像进行前景提取,以确定每个前景提取 模型所输出的前景提取结果;所述前景提取结果包括所述待提取图像中的目标对象所在的 第一前景区域和包围第一前景区域的分割边框; 根据不同所述分割边框之间的重合度,将前景提取结果进行归类; 针对同一类前景提取结果,将该类前景提取结果中的第一前景区域进行融合,以 确定该类前景提取结果所对应的目标对象的第二前景区域。 在一些实施例中,针对同一类前景提取结果,将该类前景提取结果中的第一前景 区域进行融合,以确定该类前景提取结果所对应的目标对象的第二前景区域,包括: 针对同一类前景提取结果,根据该类前景提取结果中的每个第一前景区域的位置 和每个第一前景区域的置信度,确定该类前景提取结果所对应的目标对象的第二前景区 域。 在一些实施例中,针对同一类前景提取结果,将该类前景提取结果中的第一前景 区域进行融合,以确定该类前景提取结果所对应的目标对象的第二前景区域,包括: 针对同一类前景提取结果,根据该类前景提取结果中每个第一前景区域内各个像 素位置的置信度,分别计算该类前景提取结果中每个像素位置的前景概率; 针对同一类前景提取结果,根据该类前景提取结果中每个像素位置的前景概率, 确定该类前景提取结果所对应的目标对象的第二前景区域。 在一些实施例中,针对同一类前景提取结果,将该类前景提取结果中的第一前景 区域进行融合,以确定该类前景提取结果所对应的目标对象的第二前景区域,包括: 针对同一类前景提取结果,根据该类前景提取结果中的每个第一前景区域所包含 的像素位置,确定每个像素位置的前景概率; 针对同一类前景提取结果,根据每个像素位置的前景概率,确定该类前景提取结 5 CN 111612808 A 说 明 书 2/18 页 果所对应的目标对象的第二前景区域。 在一些实施例中,针对同一类前景提取结果,将该类前景提取结果中的第一前景 区域进行融合,以确定该类前景提取结果所对应的目标对象的第二前景区域,包括: 针对同一类前景提取结果,将出现在该类前景提取结果的至少一个第一前景区域 中的像素位置,作为该类前景提取结果所对应的目标对象的第二前景区域中的像素位置。 在一些实施例中,第二前景区域是由第二前景区域的范围内所包含的全部像素位 置所组成;或,第二前景区域是由第二前景区域的轮廓点所组成。 在一些实施例中,根据不同所述分割边框之间的重合度,将前景提取结果进行归 类,包括: 根据每个分割边框的置信度,从多个分割边框中选择目标分割边框; 分别计算每个其他分割边框与目标分割边框的重合度; 根据每个其他分割边框与目标分割边框的重合度,将其他分割边框所在的前景提 取结果进行归类。 在一些实施例中,根据不同所述分割边框之间的重合度,将前景提取结果进行归 类,包括: 根据每个分割边框的类型,将每个分割边框进行分类; 针对每一类分割边框,根据该类分割边框中每个分割边框的置信度,从多个分割 边框中选择目标分割边框; 针对每一类分割边框,分别计算该类分割边框中,每个其他分割边框与目标分割 边框的重合度; 针对每一类分割边框,根据该类分割边框中,每个其他分割边框与目标分割边框 的重合度,将其他分割边框所在的前景提取结果进行归类。 在一些实施例中,分别使用不同的前景提取模型对待提取图像进行前景提取,以 确定每个前景提取模型所输出的前景提取结果,包括: 获取车载摄像头对路况环境进行拍摄而得到的待提取图像; 分别使用不同的前景提取模型对待提取图像进行前景提取,以确定每个前景提取 模型所输出的前景提取结果; 在针对同一类前景提取结果,将该类前景提取结果中的第一前景区域进行融合, 以确定该类前景提取结果所对应的目标对象的第二前景区域后,所述方法还包括: 根据目标对象的第二前景区域在待提取图像中的位置,生成自动行驶策略。 本申请还提供了一种前景区域获取装置,包括: 第一前景提取模块,用于分别使用不同的前景提取模型对待提取图像进行前景提 取,以确定每个前景提取模型所输出的前景提取结果;所述前景提取结果包括所述待提取 图像中的目标对象所在的第一前景区域和包围第一前景区域的分割边框; 第一归类模块,用于根据不同所述分割边框之间的重合度,将前景提取结果进行 归类; 第一融合模块,用于针对同一类前景提取结果,将该类前景提取结果中的第一前 景区域进行融合,以确定该类前景提取结果所对应的目标对象的第二前景区域。 在一些实施例中,第一融合模块,包括: 6 CN 111612808 A 说 明 书 3/18 页 第一确定单元,用于针对同一类前景提取结果,根据该类前景提取结果中的每个 第一前景区域的位置和每个第一前景区域的置信度,确定该类前景提取结果所对应的目标 对象的第二前景区域。 在一些实施例中,第一融合模块,包括: 第一计算单元,用于针对同一类前景提取结果,根据该类前景提取结果中每个第 一前景区域内各个像素位置的置信度,分别计算该类前景提取结果中每个像素位置的前景 概率; 第二确定单元,用于针对同一类前景提取结果,根据该类前景提取结果中每个像 素位置的前景概率,确定该类前景提取结果所对应的目标对象的第二前景区域。 在一些实施例中,第一融合模块,包括: 第三确定单元,用于针对同一类前景提取结果,根据该类前景提取结果中的每个 第一前景区域所包含的像素位置,确定每个像素位置的前景概率; 第四确定单元,用于针对同一类前景提取结果,根据每个像素位置的前景概率,确 定该类前景提取结果所对应的目标对象的第二前景区域。 在一些实施例中,第一融合模块,包括: 第五确定单元,用于针对同一类前景提取结果,将出现在该类前景提取结果的至 少一个第一前景区域中的像素位置,作为该类前景提取结果所对应的目标对象的第二前景 区域中的像素位置。 在一些实施例中,第二前景区域是由第二前景区域的范围内所包含的全部像素位 置所组成;或,第二前景区域是由第二前景区域的轮廓点所组成。 在一些实施例中,第一归类模块,包括: 第一选择单元,用于根据每个分割边框的置信度,从多个分割边框中选择目标分 割边框; 第二计算单元,用于分别计算每个其他分割边框与目标分割边框的重合度; 第一归类单元,用于根据每个其他分割边框与目标分割边框的重合度,将其他分 割边框所在的前景提取结果进行归类。 在一些实施例中,第一归类模块,包括: 第一分类单元,用于根据每个分割边框的类型,将每个分割边框进行分类; 第二选择单元,用于针对每一类分割边框,根据该类分割边框中每个分割边框的 置信度,从多个分割边框中选择目标分割边框; 第三计算单元,用于针对每一类分割边框,分别计算该类分割边框中,每个其他分 割边框与目标分割边框的重合度; 第二归类单元,用于针对每一类分割边框,根据该类分割边框中,每个其他分割边 框与目标分割边框的重合度,将其他分割边框所在的前景提取结果进行归类。 在一些实施例中,第一前景提取模块,包括: 第一获取单元,用于获取车载摄像头对路况环境进行拍摄而得到的待提取图像; 第一提取单元,用于分别使用不同的前景提取模型对待提取图像进行前景提取, 以确定每个前景提取模型所输出的前景提取结果; 所述装置还包括: 7 CN 111612808 A 说 明 书 4/18 页 第一生成模块,用于根据目标对象的第二前景区域在待提取图像中的位置,生成 自动行驶策略。 本申请还提供了一种电子设备,包括:处理器、存储介质和总线,所述存储介质存 储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储介质 之间通过总线通信,所述处理器执行所述机器可读指令,以执行时执行如前景区域获取方 法的步骤。 本申请还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算 机程序,该计算机程序被处理器运行时执行如前景区域获取方法的步骤。 本申请所提供的前景区域获取方法,首先分别使用不同的前景提取模型对待提取 图像进行前景提取,以确定每个前景提取模型所输出的前景提取结果;所述前景提取结果 包括所述待提取图像中的目标对象所在的第一前景区域和包围第一前景区域的分割边框; 而后,根据不同所述分割边框之间的重合度,将前景提取结果进行归类;最后,针对同一类 前景提取结果,将该类前景提取结果中的第一前景区域进行融合,以确定该类前景提取结 果所对应的目标对象的第二前景区域。 相关技术中,在进行前景区域融合的时候,是直接采用前景区域的位置,计算目标 对象和每个其他对象的前景区域的重合度,并根据前景区域的重合度对前景区域进行了归 类,并将同一类的前景区域进行融合。由于前景区域的形状是不规则的,这导致计算目标对 象的前景区域和其他对象的前景区域重合度时,会导致系统要消耗大量的计算资源。 而本申请所提供的方法,采用分割边框的重合度先将各个前景提取结果进行了归 类,而后再将同一类的前景提取结果中的第一前景区域进行了融合。由于分割边框是规则 图形,因此使用分割边框计算重合度的计算量要小的多,也就是,采用分割边框的重合度来 进行前景区域融合的方式,要比相关技术中的方案所付出的计算量更小。并且,分割边框是 每个前景提取模型所必然会输出的一个结果,因此,本方案中使用了分割边框进行辅助分 类,并不需要对模型进行改动,进而,使用本申请的方案能够在不改变原有模型的基础上, 降低系统整体的计算成本。 在某种实时方式中,本申请所提供的方法还提供了基于第一前景区域的置信度来 确定第二前景区域的方案,由于引入了第一前景区域的置信度,使得可以根据每个第一前 景区域的置信度计算出每个子区域的前景概率,并根据每个子区域的前景概率确定出第二 前景区域,这样可以使得确定出的前景区域的针对性更强。 在某种实时方式中,本申请所提供的方法还提供了基于第一前景区域的置信度或 像素位置的置信度来确定第二前景区域的方案,由于引入了像素位置置信度,使得可以先 确定出每个像素位置是否属于第二前景区域,进而使得最终确定出的第二前景区域更为精 细化。 为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合 所附附图,作详细说明如下。 附图说明 为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附 图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对 8 CN 111612808 A 说 明 书 5/18 页 范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这 些附图获得其他相关的附图。 图1示出了使用第一个前景提取模型对待提取图像进行前景提取,进而得到的前 景区域(前景提取的结果)的示意图; 图2示出了本申请实施例所提供的前景区域获取方法的基本流程图; 图3分割边框和前景区域的示意图; 图4示出了某一个目标对象所在的前景区域和包围该前景区域的分割边框的示意 图; 图5示出了同一类前景提取结果中的两个第一前景区域的重合情况示意图; 图6示出了某个分割边框中每个像素位置的置信度分布情况示意图; 图7示出了本申请实施例所提供的电子设备的示意图。











