
技术摘要:
本发明涉及无人机技术领域,具体是一种无人机喷洒农药的方法及系统。其中一种农药喷洒机器人的路径规划方法,包括:获取当前环境中的所有封闭轮廓数据,根据每个所述封闭轮廓数据确定每个轮廓起始点以形成所述起始点集,对所述起始点集内数据做归类处理以形成归类集; 全部
背景技术:
在农作物生长过程的各个阶段,容易受到有害生物的侵染,导致农作物正常新陈 代谢受到干扰,从生理机能到组织结构上发生一系列的变化和破坏,以至在外部形态上呈 现反常的病变现象,如枯萎、腐烂、斑点、霉粉、花叶等,统称病害。为了有效抗击病害,保护 农作物的健康生长,需要喷洒农药杀死害虫,防止农作物的减产。现如今,无人机载喷药装 置已经有部分农民开始实使用。但是现有的无人机在实施喷药操作时需要人工控制无人机 的行驶路径,通常人为控制无人机路径常常会催在喷洒不全的情况,而且出现了该情况还 无法及时发现,必须过一段时间之后,才能反映出这情况。
技术实现要素:
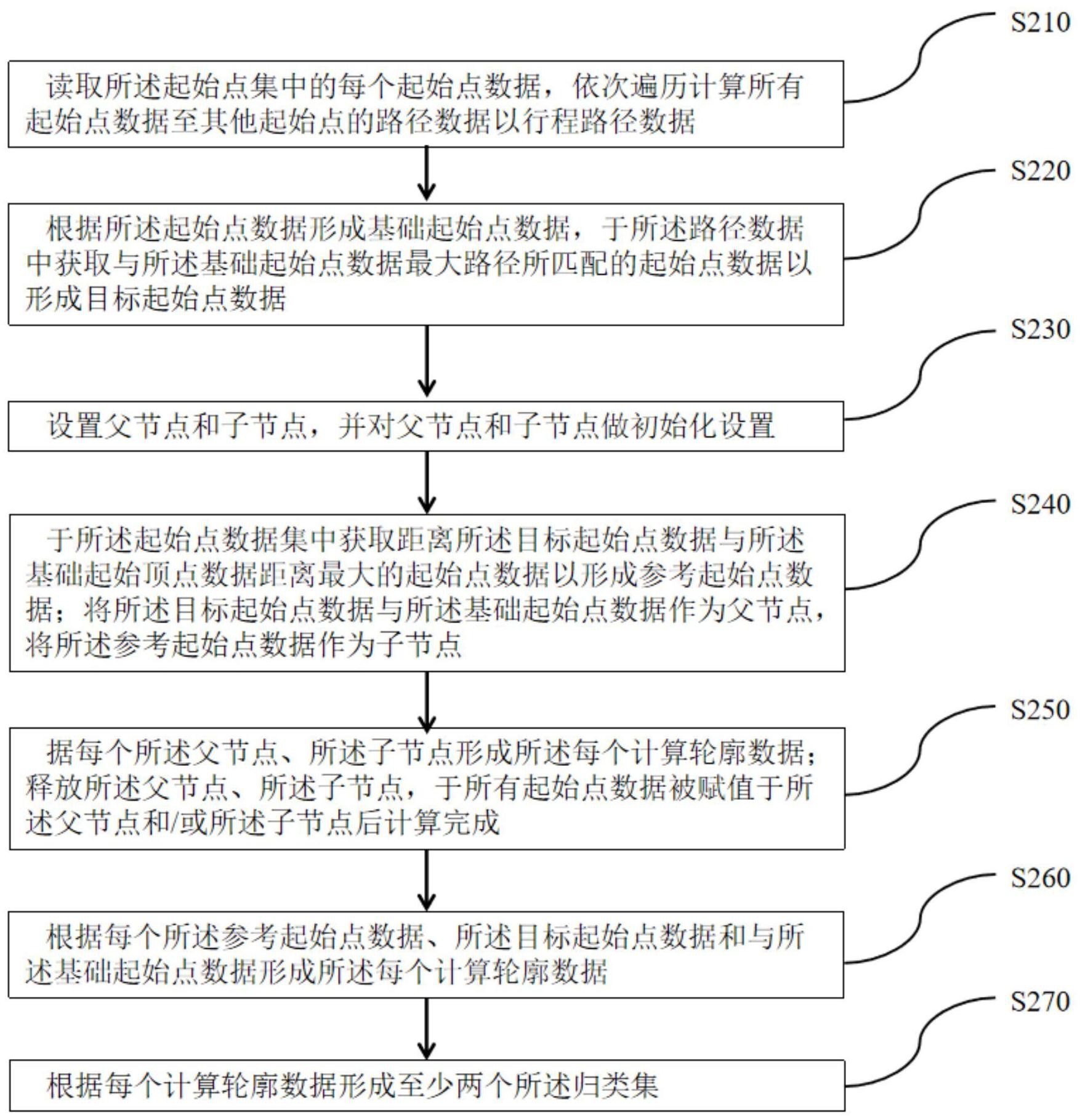
本发明提供一种农药喷洒机器人的路径规划方法,通过该规划方法可自行规划行 驶路径,减少人力成本,同时能够实现农药的全方位喷洒。具体地: 一方面,一种农药喷洒机器人的路径规划方法,其中,包括: 获取当前环境中的所有封闭轮廓数据,根据每个所述封闭轮廓数据确定每个轮廓 起始点以形成所述起始点集, 对所述起始点集内数据做归类处理以形成归类集; 根据所述归类集寻找与所述归类集匹配的计算轮廓数据,根据所述计算轮廓数据 计算当前归类集中的行程路径;于所述行程路径中寻找任一基础路径,根据该基础路径、目 标路径计算形成对匹配的第二路径, 根据所述基础路径和所述第二路径形成所述规划路径。 优选地,上述的一种农药喷洒机器人的路径规划方法,其中获取当前环境中的所 有封闭轮廓数据,根据每个所述封闭轮廓数据确定每个轮廓起始点以形成所述起始点集具 体包括: 获取当前环境中的所有封闭轮廓数据,获取每个所述轮廓数据的坐标参数; 以任意一个坐标参数作为参考坐标原点,获取与每个坐标参数距离最近的第一坐 标点和第二坐标点, 计算所述坐标原点与所述第一坐标点以形成第一斜率, 计算所述坐标原点与所述第二坐标点以形成第二斜率; 于所述第一斜率不等于第二斜率的状态下,根据所述坐标原点形成所述起始点; 于所述第一斜率等于第二斜率的状态下,删除所述坐标原点; 根据所述起始点形成所述起始点集。 优选地,上述的一种农药喷洒机器人的路径规划方法,其中对所述起始点集内数 据做归类处理以形成归类集具体包括: 5 CN 111736631 A 说 明 书 2/7 页 读取所述起始点集中的每个起始点数据,依次遍历计算所有起始点数据至其他起 始点的路径数据以形成路径数据; 根据所述起始点数据形成基础起始点数据,于所述路径数据中获取与所述基础起 始点数据最大路径所匹配的起始点数据以形成目标起始点数据; 设置父节点和子节点,并对父节点和子节点做初始化设置; 于所述起始点数据集中获取距离所述目标起始点数据与所述基础起始顶点数据 距离最大的起始点数据以形成参考起始点数据;将所述目标起始点数据与所述基础起始点 数据作为两个父节点,将所述参考起始点数据作为子节点; 根据两个所述父节点、所述子节点形成所述每个计算轮廓数据;释放所述父节点、 所述子节点;于所有起始点数据被赋值于所述父节点和/或所述子节点后计算完成; 根据每个计算轮廓数据形成至少两个所述归类集。 优选地,上述的一种农药喷洒机器人的路径规划方法,根据所述归类集寻找与所 述归类集匹配的计算轮廓数据,根据所述计算轮廓数据计算当前归类集中的行程路径;于 所述行程路径中获取基础路径,根据该基础路径、目标路径计算形成对匹配的第二路径具 体包括: 读取所述归类集数据,计算每个所述计算轮廓数据的行程; 根据所述计算轮廓数据的行程的长短对所述归类集数据做排序处理以形成第一 参考路径;以所述第一参考路径作为基础路径; 根据所述基础路径、目标路径形成第二路径。 优选地,上述的一种农药喷洒机器人的路径规划方法,所述目标路径为无人机单 次运行状态下的的最大行驶路径。 再一方面,本发明再提供一种农药喷洒机器人的路径规划系统,其中,包括: 起始点集形成模块,用以获取当前环境中的所有封闭轮廓数据,根据每个所述封 闭轮廓数据确定每个轮廓起始点以形成所述起始点集, 归类集形成模块,对所述起始点集内数据做归类处理以形成归类集; 路径计算形成模块,根据所述归类集寻找与所述归类集匹配的计算轮廓数据,根 据所述计算轮廓数据计算当前归类集中的行程路径;于所述行程路径中寻找任一基础路 径,根据该基础路径、目标路径计算形成对匹配的第二路径, 路径规划模块,根据所述基础路径和所述第二路径形成所述规划路径。 优选地,上述的一种农药喷洒机器人的路径规划系统,其中,所述起始点集形成模 块具体包括: 第一获取单元,获取当前环境中的所有封闭轮廓数据,获取每个所述轮廓数据的 坐标参数; 第一计算单元,以任意一个坐标参数作为参考坐标原点,获取与每个坐标参数距 离最近的第一坐标点和第二坐标点,计算所述坐标原点与所述第一坐标点以形成第一斜 率,计算所述坐标原点与所述第二坐标点以形成第二斜率; 第一判断单元,于所述第一斜率不等于第二斜率的状态下,根据所述坐标原点形 成所述起始点;于所述第一斜率等于第二斜率的状态下,删除所述坐标原点; 第一形成单元,根据所述起始点形成所述起始点集。 6 CN 111736631 A 说 明 书 3/7 页 优选地,上述的一种农药喷洒机器人的路径规划系统,其中归类集形成模块具体 包括: 第二计算单元,读取所述起始点集中的每个起始点数据,依次遍历计算所有起始 点数据至其他起始点的路径数据以形成路径数据; 目标起始点数据形成单元,根据所述起始点数据形成基础起始点数据,于所述路 径数据中获取与所述基础起始点数据最大路径所匹配的起始点数据以形成目标起始点数 据; 初始化单元,设置父节点和子节点,并对父节点和子节点做初始化设置; 循环计算单元,于所述起始点数据集中获取距离所述目标起始点数据与所述基础 起始顶点数据距离最大的起始点数据以形成参考起始点数据;将所述目标起始点数据与所 述基础起始点数据作为两个父节点,将所述参考起始点数据作为子节点;根据两个所述父 节点、所述子节点形成所述每个计算轮廓数据;释放所述父节点、所述子节点;于所有起始 点数据被赋值于所述父节点和/或所述子节点后计算完成; 归类单元,根据每个计算轮廓数据形成至少两个所述归类集。 优选地,上述的一种农药喷洒机器人的路径规划系统,路径计算形成模块具体包 括: 第三读取单元,读取所述归类集数据,计算每个所述计算轮廓数据的行程; 第三排序单元,根据所述计算轮廓数据的行程的长短对所述归类集数据做排序处 理以形成第一参考路径;以所述第一参考路径作为基础路径; 路径计算单元,根据所述基础路径、目标路径形成第二路径。 优选地,上述的一种农药喷洒机器人的路径规划系统,所述目标路径为无人机单 次运行状态下的的最大行驶路径。 有益效果: 采用本发明的计算方案,采用迭代计算方法将环境区域分解呈若干个面积最大三 角形,以三角形最长边的斜率作为扫描斜率对三角形进行扫描,对于面积较小的三角形,采 用单程扫描方式,采用面积较大的三角形,采用来回双程方式扫描。同时根据目标路径选择 跨区域轨迹,一方面可以对环境区域做全面分解喷洒,另一方面,也大大降低了人力成本, 无需人员操控,可直接实现自动喷洒。 附图说明 图1为本发明实施例提供的一种农药喷洒机器人的路径规划方法的流程示意图; 图2为本发明实施例提供的一种农药喷洒机器人的路径规划方法的流程示意图; 图3为本发明实施例提供的一种农药喷洒机器人的路径规划方法的规划示意图; 图4为本发明实施例提供的一种农药喷洒机器人的路径规划方法的规划示意图; 图5为本发明实施例提供的一种农药喷洒机器人的路径规划方法的规划示意图。











