
技术摘要:
本发明涉及园林机械领域作为绿篱、草坪的修剪工作机构的支承和运动机构技术领域、矿山机械作为掘进、掏槽、开挖工作机构的支承和运动机构技术领域、工程机械搬运平台、机械手的抓取移位工作机构和支承和运动机构技术领域,特别涉及一种摇杆联动机械臂。本发明中摇杆联 全部
背景技术:
现阶段园林机械、矿山机械和工程机械使用的机械臂都是多节杆件结构通过销轴 连接组成,所支撑的工作机构运动轨迹都是绕一个销轴回转形成的运动轨迹或者多个销轴 回转形成的复合运动轨迹,受杆件上推杆支点和行程在二个杆件之间运动的限制,控制绕 销轴运动的转角小,实现大幅度杆件运动,需要多节杆件的复合运动,导致机械结构复杂, 多组推拉杆控制系统复杂,多杆件的整体稳定性差,无法实现大载荷的工作机构沿着大尺 寸轨迹运行。
技术实现要素:
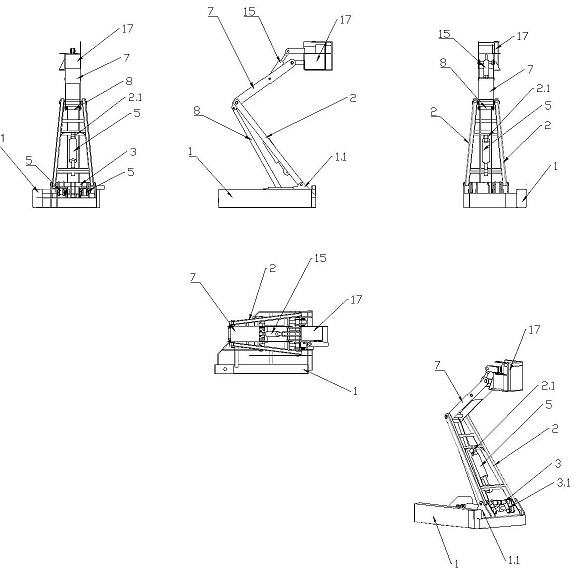
为了解决现有技术存在的问题,本发明提供了一种摇杆联动机械臂。所述摇杆联 动机械臂包括:底座、主臂、外臂、连杆、摇杆、销轴、动力推杆、工作机构。 主臂一端通过销轴与底座的支承座1连接,并底座的支承座1同轴与摇杆中心孔连 接,主臂中间支承座通过销轴与动力推杆缸体端连接,动力推杆活塞杆端通过销轴与摇杆 的摇臂1连接,连杆一端通过销轴与摇杆的摇臂1连接,主臂另一端通过销轴与外臂一端连 接,外臂靠近与主臂连接一端相近的另一个销孔通过销轴与连杆另一端连接,在摇杆的摇 臂2和底座的二个支承座2之间通过销轴并列连接二个动力推杆, 外臂中间位置的支承座通过销轴与动力推杆的缸体端孔连接,动力推杆的活塞杆端孔 通过销轴与工作机构支承座2连接,工作机构支承座2通过销轴与外臂另一端连接。上述的 主臂、外臂、连杆、摇杆分别通过销轴与动力推杆连接构成机械臂运动杆件机构,通过动力 推杆活塞杆的伸缩运动,实现主臂一端绕底座支承板做旋转运动、主臂另一端与外臂相对 伸展运动、负载结构件绕外臂一端相对旋转运动,通过上述的一个动力推杆活塞杆的伸缩 运动或多个动力推杆活塞杆的伸缩协同运动,实现工作机构相对底座的平行升降、回转和 升降复合运动,工作机构就能完成多自由度的各种作业。 所述动力推杆类型和参数需要根据具体工况条件进行选择。 所述底座、主臂、外臂、连杆、摇杆、销轴、动力推杆的尺寸需要根据具体工况和设 备技术参数进行选择。 所述主臂一端的孔通过销轴与底座支承座的同轴孔和摇杆中心孔连接,主臂另一 端的孔通过销轴与外臂一端的孔连接,主臂中间位置横梁的支承座的孔通过销轴与动力推 杆缸体端的孔连接,动力推杆活塞杆端孔通过销轴与摇杆摇臂的孔连接,连杆一端的孔通 过销轴与摇臂的孔同轴连接,连杆另一端的孔通过销轴与外臂一端的孔连接,外臂同一端 4 CN 111571604 A 说 明 书 2/3 页 靠近连杆与外臂连接位置的孔通过销轴与主臂一端的孔连接,通过动力推杆的活塞杆伸缩 实现主臂绕底座支承座同轴孔做回转运动。 所述动力推杆缸体端孔通过销轴与底座支承座的同轴孔连接,动力推杆活塞杆端 孔通过销轴与摇杆摇臂孔连接,通过动力推杆活塞杆的伸缩运动实现主臂与外臂做相对伸 展运动。 所述外臂另一端的同轴孔通过销轴与工作机构的支承座同轴孔连接,外臂中部位 置支承座的同轴孔通过销轴与动力推杆缸体端孔连接,动力推杆活塞杆端孔通过销轴与工 作机构的支承座的同轴孔连接,通过动力推杆活塞杆的伸缩实现工作机构绕外臂一端支承 座的同轴孔做回转运动。 所述主臂绕底座支承座同轴孔的回转运动、主臂与外臂相对的伸展运动和负载结 构件绕外臂一端支承孔的回转运动的合成运动实现负载结构件相对底座水平面做平行或 垂直升降运动、水平横向运动和与底座水平面呈倾斜角的垂直和水平运动,实现多维度合 成运动。 附图说明 图1是本发明提供的一种摇杆联动机械臂示意图。 图2是本发明提供的一种摇杆联动机械臂具体分解结构图。 其中:1底座;1.1支承座;1.2支承座;2主臂;2.1支承座;3摇杆;3.1摇臂;3.2摇臂; 4销轴;5动力推杆;6销轴;7外臂;7.1支承座;8连杆;9销轴;10销轴;11动力推杆;12销轴;13 销轴;14销轴;15动力推杆; 16销轴;17工作机构;17.1支承座;17.2支承座;18销轴;19销 轴。











