
技术摘要:
本发明公开了一种基于SiPM信号时序点的测距方法及装置,方法包括:控制信号发射端向目标物体发射信号,获取SiPM信号接收端接收经目标物体反射的信号,获取信号的时序点;其中,所述获取信号的时序点包括:原始信号经滤波器进行滤波处理后生成滤波信号;将原始信号和滤 全部
背景技术:
传统的激光雷达采用线性模式的探测器,如PD(Photo-Diode,光电二极管)、APD (Avalanche Photo Diode,雪崩二极管)等探测器。随着技术发展,新型的激光雷达采用盖 革模式的单光子探测器,如SiPM(Silicon phothomultiplier,硅光电倍增管);SiPM是一种 由多个SPAD(Single Photo Avalanche Diode,单光子雪崩二极管)构成的阵列,阵列中所 有SPAD均被电学并联,所有的SPAD共用一个端口进行信号输出,SiPM的结构示意图如图1所 示。 飞行时间(Time-of-Flight,ToF)是激光雷达实现精准测距的主流方式之一,测距 原理如图2所示。信号发射端发射的光信号经目标物体反射至信号接收端,处理器根据信号 发射端与信号接收端之间的时间间隔及光速计算出目标物体距离。 探测过程中,相同的物体距离越远,反射回的光子数越少。同样的距离,由于物体 反射率不一样,不同的物体反射回的光子数也会不一样。比如雪或玻璃,发射的光子数与接 收到的光子数不会存在很大的差异;而有些物体是全黑的,发射的光子与接收的光子数则 会有很大的差异。 由于信号接收端接收到的光子数与信号发射端发射至目标物体的光子数存在差 异,使得传感器探测到的目标物体距离和实际距离存在差异,这种差异我们称之为漂移误 差(Walk error)。 传统的激光雷达,形成的信号图是高斯光斑,可以通过设置一个阈值来减小漂移 误差(Walk error),但是此种方案并不适用于SiPM类的激光雷达。 测距精度是激光雷达工作性能的重要指标之一。因此,现有技术还有待于改进和 发展。
技术实现要素:
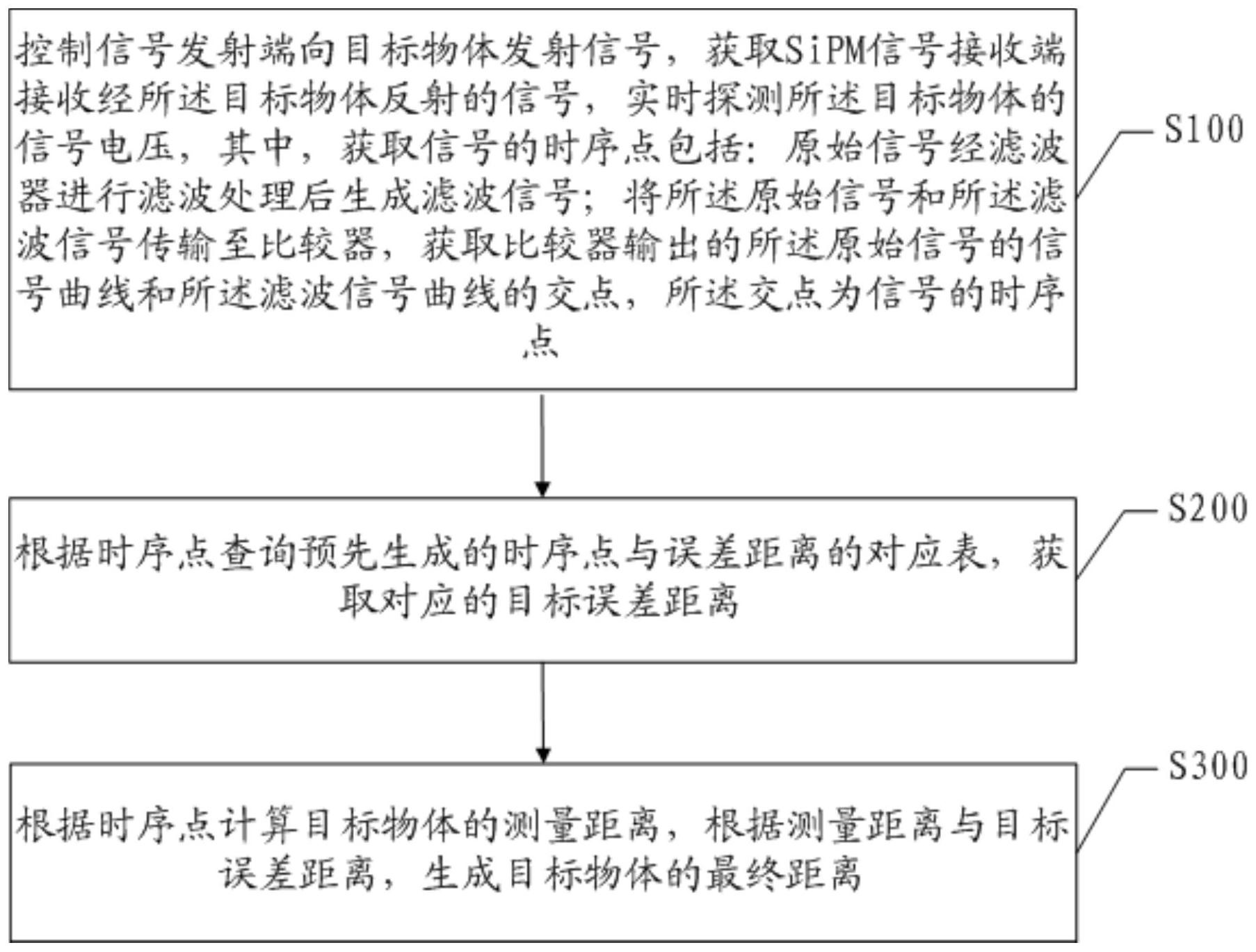
鉴于上述现有技术的不足,本发明的目的在于提供一种基于SiPM信号时序点的测 距方法及装置,旨在解决现有技术中SiPM类激光雷达测定目标物体时,存在漂移误差,测距 精度低的问题。 本发明的技术方案如下: 一种基于SiPM信号时序点的测距方法,所述方法包括: 控制信号发射端向目标物体发射信号,获取SiPM信号接收端接收经所述目标物体 反射的信号,获取信号的时序点; 其中,所述获取信号的时序点包括:原始信号经滤波器进行滤波处理后生成滤波 信号;将所述原始信号和所述滤波信号传输至比较器,获取比较器输出的所述原始信号的 4 CN 111596302 A 说 明 书 2/6 页 信号曲线和所述滤波信号的信号曲线的交点,所述交点为信号的时序点; 根据所述时序点查询预先生成的时序点与误差距离的对应表,获取对应的目标误 差距离; 根据所述时序点计算所述目标物体的测量距离,根据所述测量距离与所述目标误 差距离,生成所述目标物体的实际距离。 可选地,所述时序点与误差距离的对应表的生成步骤包括: 控制信号发射端向测试物体发射信号,获取SiPM信号接收端接收经所述测试物体 反射的信号,获取信号的测试时序点; 其中,所述获取信号的测试时序点包括:原始测试信号经滤波器进行滤波处理后 生成滤波测试信号;将所述原始测试信号和所述滤波测试信号传输至比较器,获取比较器 输出的所述原始测试信号的信号曲线和所述滤波测试信号的信号曲线的交点,所述交点为 信号的测试时序点; 根据所述测试时序点计算测试物体的测试距离,利用所述测试距离与所述预定距 离生成测试误差距离; 将测试时序点与所述测试误差距离对应并记录; 改变测试物体的距离,记录每一组所述测试时序点及对应的所述误差距离,生成 时序点与误差距离的对应表。 可选地,所述时序点计算所述目标物体的测量距离,根据所述测量距离与所述目 标误差距离,生成所述目标物体的实际距离,包括: 根据时序点与光速计算目标物体的测量距离的计算公式为: 其中Stp为测量距离,c为光速,tp为时序点; 根据测量距离与目标误差距离,生成目标物体的实际距离的计算公式为St=Stp Serror (公式2) 其中,St为目标物体的实际距离,Serror为目标误差距离。 本发明的另一实施例提供了一种基于SiPM信号时序点的测距装置,所述装置包括 至少一个处理器;以及, 与所述至少一个处理器通信连接的存储器;其中, 所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一 个处理器执行,以使所述至少一个处理器能够执行上述的基于SiPM信号时序点的测距方 法。 本发明的另一实施例还提供了一种非易失性计算机可读存储介质,所述非易失性 计算机可读存储介质存储有计算机可执行指令,该计算机可执行指令被一个或多个处理器 执行时,可使得所述一个或多个处理器执行上述的基于SiPM信号时序点的测距方法。 本发明的另一种实施例提供了一种计算机程序产品,所述计算机程序产品包括存 储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所 述程序指令被处理器执行时,使所述处理器执行上述的基于SiPM信号时序点的测距方法。 有益效果:本发明公开了一种基于SiPM信号时序点的测距方法及装置,相比于现 5 CN 111596302 A 说 明 书 3/6 页 有技术,本发明实施例中的SiPM类激光雷达获取信号的时序点,通过信号的时序点计算测 量距离,并根据时序点查询预先生成的时序点与误差距离对应表,获取误差距离,根据测量 距离与误差距离得到目标距离,减少了测距过程中的测量误差,提高了测距精度。 附图说明 下面将结合附图及实施例对本发明作进一步说明,附图中: 图1为SiPM结构示意图; 图2为激光雷达测距原理示意图; 图3为SiPM类激光雷达的信号输出电压随时间变化的示意图; 图4为本发明一种基于SiPM信号时序点的测距方法较佳实施例的流程图; 图5为本发明一种基于SiPM信号时序点的测距装置的较佳实施例的硬件结构示意 图。











