
技术摘要:
本发明涉及一种智能机器人领域,尤其涉及一种高智能人型机器人四肢部分的配电系统。包括:一主电池供电模块;一第一分流模块;一急停控制模块;一电压均衡模块,所述电压均衡模块分别连接所述四肢部分和所述主电池供电模块,用于获取所述四肢部分的运动状况,并根据所 全部
背景技术:
现有的应用于智能机器人的配电系统,在对智能机器人的四肢进行供电时往往没 有较好的供电调配方案,所导致的结果就是智能机器人对躯干部位中的四肢部分的控制不 力,无法完成一些既定目标。
技术实现要素:
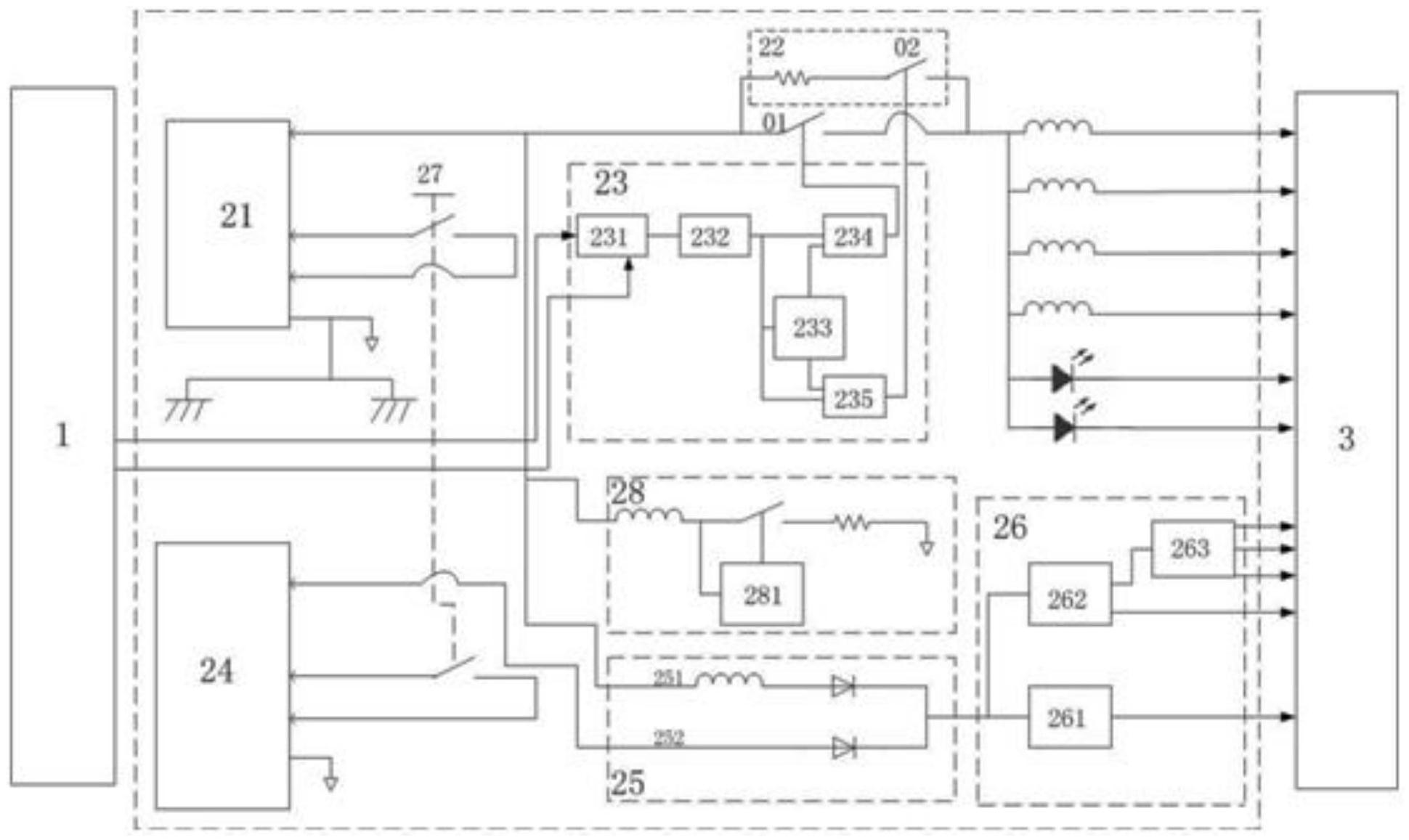
为解决上述的现有问题,现提供一种高智能人型机器人四肢部分的配电系统,用 于向所述机器人的四肢部分供电,其特征在于,包括: 一主电池供电模块,所述主电池供电模块通过一第一线路与所述四肢部分连接, 所述主电池供电模块用于向所述四肢部分供电,所述第一线路中设置一第一开关; 一第一分流模块,所述第一分流模块中设置一第二线路,所述第二线路与所述第 一线路并联,所述第二线路上设置一电阻与一第二开关串联; 一急停控制模块,所述急停控制模块的输入端与一客户端连接,用于接收所述客 户端发送的急停指令或复位指令,所述急停控制模块的输出端分别与所述第一开关、所述 第二开关连接,所述急停控制模块中设置一逻辑判断电路,所述逻辑判断电路用于对所述 急停指令或所述复位指令进行逻辑判断,并根据逻辑判断结果控制所述第一开关和所述第 二开关的闭合/断开的状态。 优选的,还包括: 一电压均衡模块,所述电压均衡模块分别连接所述四肢部分和所述主电池供电模 块,用于获取所述四肢部分的运动状况,并根据所述运动状况对所述主电池模块输出的电 压进行均衡处理。 优选的,所述电压均衡模块控制所述主电池模块向所述四肢部分输出48V的电压。 优选的,所述逻辑判断电路中包括: 一锁存器,所述锁存器的输入端与所述客户端远程连接,用于获取所述客户端发 送的急停指令或复位指令,进行缓存处理并输出; 一延时器,所述延时器的输入端与所述锁存器的输出端连接,用于对所述锁存器 输出的所述急停指令或所述复位指令进行延时处理并输出; 一预充电模块,所述预充电模块的输入端连接所述延时器的第一输出端; 一第一运算单元,所述第一运算单元的第一输入端与所述延时器的第二输出端连 接,所述第一运算单元的第二输入端与所述预充电模块的第一输出端连接,所述第一运算 单元的输出端与所述第一开关连接,所述第一运算单元用于根据所述延时器和所述预充电 模块输出的指令进行逻辑运算,并根据运算结果控制所述第一开关的闭合/断开的状态; 5 CN 111555390 A 说 明 书 2/7 页 一第二运算单元,所述第二运算单元的第一输入端与所述延时器的第二输出端连 接,所述第一运算单元的第二输入端与所述预充电模块的第一输出端连接,所述第二运算 单元的输出端与所述第二开关连接,所述第二运算单元用于根据所述延时器和所述预充电 模块输出的指令进行逻辑运算,并根据运算结果控制所述第二开关的闭合/断开的状态;。 优选的,所述主电池模块通过所述第一线路分别与所述四肢部分中的检测左臂运 动的电感部件、检测右臂运动的电感部件、检测左腿运动的电感部件和检测右腿运动的电 感部件连接。 优选的,所述配电系统中还包括: 一辅助供电模块; 一切换模块,所述切换模块的第一输入端分别与所述主电池模块、所述辅助供电 模块连接,所述切换模块的输出端与所述智能机器人连接,所述切换模块中设置一切换电 路,所述切换电路用于切换所述主电池模块、所述辅助供电模块向所述智能机器人供电。 优选的,所述切换电路中包括: 一第一切换支路,所述第一切换支路由一电感和一第一二极管串联组成,所述第 一切换支路的一端连接所述主电池模块,所述第一切换支路的另一端连接所述智能机器 人; 一第二切换支路,所述第二切换支路由一第二二极管组成,所述第二切换支路的 一端连接所述辅助电池模块,所述第二切换支路的另一端连接所述智能机器人; 所述第一切换支路和所述第二切换支路并联组成所述切换电路。 优选的,所述配电系统中还包括: 一DCDC模块,所述DCDC模块的输入端与所述切换模块连接,所述DCDC模块的输出 端与所述智能机器人连接,所述DCDC模块中设置一DCDC转换电路,所述DCDC转换电路对所 述切换模块输出的电压进行电压转换处理,生成一用于智能机器人逻辑控制的电压,并输 出至所述智能机器人。 优选的,所述DCDC转换电路中包括: 第一转换单元,所述第一转换单元的输入端与所述切换模块的输出端连接,所述 第一转换单元的输出端与所述智能机器人连接,用于对所述切换模块的输出的电压进行电 压处理,生成一用于智能机器人第一逻辑控制的电压并输出至所述智能机器人; 第二转换单元,所述第二转换单元与所述第一转换单元并联,所述第二转换单元 的输入端与所述切换模块的输出端连接,所述第二转换单元的输出端与所述智能机器人连 接,用于对所述切换模块的输出的电压进行电压处理,生成一用于智能机器人第二逻辑控 制的电压并输出至所述智能机器人; 第三转换单元,所述第三转换单元的输入端与所述第二转换单元的输出端连接, 所述第三转换单元的输出端与所述智能机器人连接,用于对所述第二转换单元的输出的电 压进行电压处理,生成一用于智能机器人第三逻辑控制的电压并输出至所述智能机器人。 优选的,还包括一启动开关,所述启动开关分别与所述主电池模块、所述辅助供电 模块连接,用于启动所述主电池模块和所述辅助供电模块。 优选的,所述主电池模块中包括: 多个主电池组; 6 CN 111555390 A 说 明 书 3/7 页 一主电池控制单元,所述主电池控制单元与所有所述主电池组连接,用于控制所 述主电池组启动; 所述辅助电池模块包括: 一辅助电池组; 一辅助电池控制单元,所述辅助电池控制单元与所述辅助电池组连接,用于控制 所述辅助电池组启动; 所述启动开关与所述主电池控制单元、所述辅助电池控制单元连接,用于控制所 述主电池控制单元启动所述主电池组,以及控制所述辅助电池控制单元启动所述辅助电池 组。 优选的,所述配电系统中还包括: 一第二分流模块,所述第二分流模块与所述主电池供电模块连接,所述第二分流 模块中设置一分流电路,所述分流电路用于对所述主电池供电模块输入所述切换模块的电 流进行分流。 上述技术方案的有益效果是:控制智能机器人的运动和停止,并且防止工作人员 的误触对智能机器人的影响。 附图说明 图1是本发明中的一种优选实施例的电路结构示意图; 图2是本发明中的一种优选实施例的电压均衡模块的示意图; 图3是本发明中的一种优选实施例的电压均衡模块的电压均衡示意图。











