
技术摘要:
本发明公开了一种变电站倒闸操作的顺序控制系统和方法,以操作项目软件预制,操作任务模块搭建、设备状态自动判别、防误联锁智能校核为主要特点,基于任务生成、模拟预演、指令执行的操作流程,实现了操作步骤一键启动、操作过程自动顺序执行的一键式顺序控制功能。本 全部
背景技术:
近年来,随着对电网安全运行水平和服务质量要求的不断提高,变电站运检工作 量大幅增加,有限的人员数量增长和人员结构问题极为突出,安全形势愈发严峻,必须通过 提升电网自动化和智能化水平,提高有效劳动生产率才能适应未来的发展需要。在变电站 日常运维中,倒闸操作占据了大部分工作内容。目前变电站主要采用人工倒闸模式,普遍存 在流程复杂、重复工作量大、操作效率低、安全风险高等问题,采用顺序控制是解决上述问 题的有效途径。 目前,顺序控制功能的还处于试点阶段,普遍存在操作方式不统一、操作覆盖面 窄、典型功能不完备、人工干预环节复杂等问题。同时由于开关、刀闸机构存在卡涩、遥控操 作不可靠等问题,需要加强顺控操作过程中的防误操作校核能力,降低顺控操作功能的使 用风险。因此,在部分已配置了顺控功能的变电站中,受上述诸多问题的影响,大部分并未 启用相应功能,顺序控制的优势并未发挥。
技术实现要素:
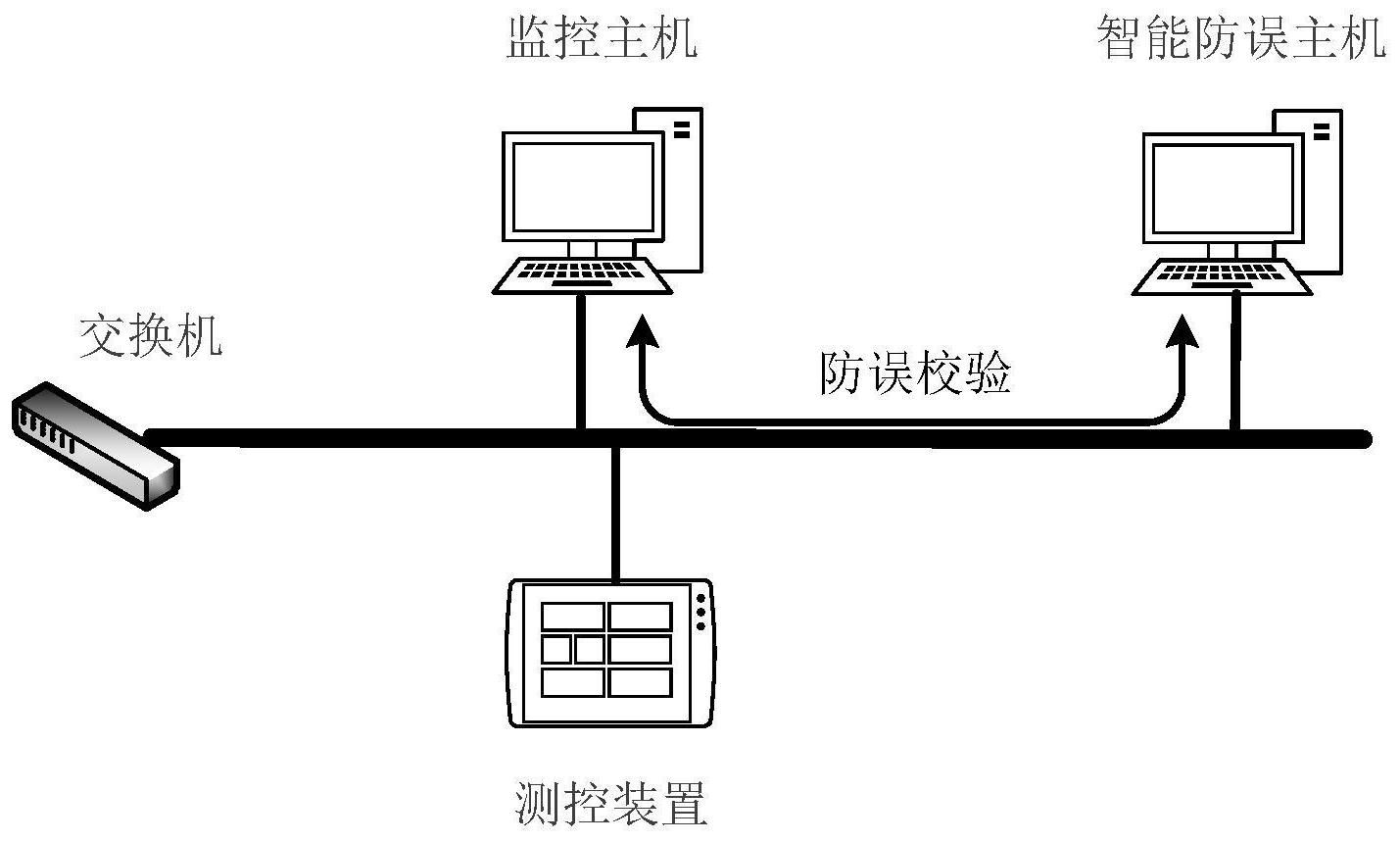
针对现有技术的缺陷和不足,本发明提供了一种新型的变电站倒闸操作的顺序控 制系统和方法,以操作项目软件预制,操作任务模块搭建、设备状态自动判别、防误联锁智 能校核为主要特点,生成过程简便高效、模拟预演安全可靠、执行过程准确迅速,实现了操 作步骤一键启动、操作过程自动顺序执行的一键式顺序控制功能。 技术方案 为实现上述目的,本发明采用如下技术方案: 本发明提出了一种变电站倒闸操作的顺序控制系统,包括监控主机、智能防误主 机,测控装置及交换机;智能防误主机和测控装置均通过交换机连接到监控主机;所述监控 主机具备顺控控制功能,内置防误校核功能、预制操作票库功能;智能防误主机通过以太网 与监控主机通讯,接收监控主机发送过来的顺控操作票,提供独立的防误校核功能; 所述监控主机包括操作任务生成模块、模拟预演模块、指令执行模块;其中, 所述操作任务生成模块用于根据倒闸操作任务内容,选择操作对象,核对当前状 态,确认操作目标状态,生成顺控操作任务;在选择操作对象后,识别操作对象的设备状态 作为初始状态,禁止添加与设备初始状态不一致的操作项目;添加一项操作项目后,更新该 项目的目标状态作为当前的设备状态,后面继续添加的操作项目,以更新后的设备状态作 为初始状态;所述操作任务生成模块执行成功后,允许进入模拟预演模块; 所述模拟预演模块用于对已经生成的操作任务在模拟实际倒闸过程的方式下,对 运行规则和防误规则进行全面校核;模拟预演前核对当前设备态和已生成的操作任务的初 5 CN 111614157 A 说 明 书 2/6 页 始状态一致,否则,退出预演流程;模拟预演时,所有操作必须同时校验监控主机中的内置 防误功能和智能防误主机,当且仅当两套系统全部通过后,操作才被允许;所述模拟预演环 节执行成功后,允许进入指令执行模块; 所述指令执行模块由监控主机下达一键顺控任务指令执行命令,按照顺控任务定 义步骤,按顺序依次执行;执行前核对当前设备态和已生成的操作任务的初始状态一致,否 则,退出执行流程;指令执行环节的所有操作必须同时校验监控主机中的内置防误功能和 智能防误主机,当且仅当两套系统全部通过后,操作才被允许。 本发明相应提出了一种变电站倒闸操作的顺序控制方法,所述方法包括如下步 骤: 步骤1、操作任务生成环节; 所述操作任务生成环节用于根据倒闸操作任务内容,选择操作对象,核对当前状 态,确认操作目标状态,生成顺控操作任务;在选择操作对象后,识别操作对象的设备状态 作为初始状态,禁止添加与设备初始状态不一致的操作项目;添加一项操作项目后,更新该 项目的目标状态作为当前的设备状态,后面继续添加的操作项目,以更新后的设备状态作 为初始状态; 步骤2、模拟预演环节; 操作任务生成环节执行成功后,允许进入模拟预演环节; 所述模拟预演环节用于对已经生成的操作任务在模拟实际倒闸过程的方式下,对 运行规则和防误规则进行全面校核;模拟预演前核对当前设备态和已生成的操作任务的初 始状态一致,否则,退出预演流程;模拟预演时,所有操作必须同时校验监控主机中的内置 防误功能和智能防误主机,当且仅当两套系统全部通过后,操作才被允许; 步骤3、指令执行环节; 模拟预演环节执行成功后,允许进入指令执行环节;由监控主机下达一键顺控任 务指令执行命令;所述指令执行环节用于按照顺控任务定义步骤,按顺序依次执行;执行前 核对当前设备态和已生成的操作任务的初始状态一致,否则,退出执行流程;指令执行环节 的所有操作必须同时校验监控主机中的内置防误功能和智能防误主机,当且仅当两套系统 全部通过后,操作才被允许。 进一步地,所述操作任务生成环节在生成操作任务时,监控主机自动判断选择的 操作对象的当前设备态是否和生成任务要求的当前设备态一致,若不一致应禁止生成任 务;生成操作任务后,变电站监控主机应将操作任务的目标设备态模拟置为满足。 进一步地,所述操作任务生成环节允许继续添加任务生成组合顺控任务;进行任 务组合时,在上一操作任务生成后的模拟断面上判断下一操作任务的当前设备态是否满 足,若不满足应禁止任务组合。 进一步地,所述模拟预演环节的全过程包括:检查操作条件、预演前当前设备态核 实、监控系统内置防误闭锁校验、智能防误主机防误校核、单步模拟操作,全部环节成功后 确认模拟预演完毕。 进一步地,所述模拟预演环节还包括: 模拟预演前应检查操作条件列表是否全部满足,若有不满足项应禁止模拟预演并 提示错误; 6 CN 111614157 A 说 明 书 3/6 页 模拟预演前应检查指令中的当前设备态与操作对象的实际状态是否一致,若不一 致应禁止模拟预演并提示错误; 模拟预演时,所有环节均经监控主机内置防误逻辑闭锁校验,若校验不通过应终 止模拟预演并提示错误; 模拟预演时,所有环节均经独立智能防误主机防误逻辑校核,若校核不通过应终 止模拟预演并提示错误; 模拟预演过程中每一个操作项目的预演结果应逐项显示,任何一步模拟操作失 败,应终止模拟预演并说明失败原因。 进一步地,所述指令执行环节全过程包括启动指令执行、检查操作条件、执行前当 前设备态核实、顺控闭锁信号判断、全站事故总判断、单步执行前条件判断、单步监控系统 内置防误闭锁校验、单步智能防误主机防误校核、下发单步操作指令、单步确认条件判断, 全部环节成功后确认指令执行完毕。 进一步地,所述指令执行环节还包括: 指令执行前检查指令中的当前设备态与操作对象的实际状态是否一致,若不一致 应禁止指令执行并提示错误; 单步执行前应判断操作条件是否满足,若不满足,应终止指令执行并提示不满足 项信息; 单步执行前应判断是否有闭锁信号,若有闭锁信号发生,应终止指令执行并提示 “异常监视闭锁”信号; 单步执行前应判断是否有全站事故总信号,若有全站事故总信号发生,应终止指 令执行并提示“事故闭锁”信号; 单步执行前应判断本步操作的执行前条件是否满足,若不满足应终止操作,并弹 出提示“异常监视闭锁”信号; 单步执行前本步操作应经监控主机内置防误逻辑闭锁校验,若校验不通过应终止 操作,并提示“内置防误闭锁”; 单步执行前本步操作应经独立智能防误主机防误逻辑校核,若校核不通过应暂停 操作,并提示“智能防误校核闭锁”; 执行操作前条件判断完毕且全部符合后,监控系统向测控装置下发遥控操作指 令,开始执行本步操作,指令执行过程结果逐项显示,执行每一步操作项目之后更新操作条 件、目标状态。 进一步地,所述指令执行环节设置人工干预功能,在必要的情况下对当前操作任 务暂停、重启或终止,以保障执行期间的安全性。 进一步地,所述人工干预功能具体包括:在指令执行过程中能够暂停执行操作,任 务暂停后能够继续执行操作,在任务执行过程中能够终止执行操作;一键顺控任务暂停时 限作为系统参数可设置,超时后一键顺控操作应自动终止;单步执行结束后应判断本步操 作的确认条件是否满足,若确认条件已满足则继续执行,若不满足应自动暂停执行操作。 有益效果 本发明提供了一种变电站倒闸操作的顺序控制系统和方法,本方案在实现变电站 倒闸过程中,通过操作项目预制,规避了现场工作票的开票、审批环节,降低了管理成本,同 7 CN 111614157 A 说 明 书 4/6 页 时也降低了对操作人员技术水平的要求。通过模块化搭建操作任务,扩大了顺控操作模式 的适用范围,提高了顺控操作的可用性。通过设备状态自动识别,一方面在降低了模块化搭 建操作任务的难度,同时,作为在顺控预演和指令执行的预先判断条件,提高了顺控操作的 安全性,同时也降低了操作人员的工作量,简化了操作流程。两套防误系统的使用,提高了 防止误操作的能力,操作过程一键启动、自动执行,大幅提高了变电站刀闸操作的效率和安 全性,本发明对于解决今后以及长期一段时间电网运行人员紧缺而操作任务繁重的矛盾问 题上,具有重要的推广和应用价值。 附图说明 图1是本发明的变电站顺序控制系统结构图; 图2是顺控操作任务生成的流程图; 图3是顺控预演任务的流程图; 图4是顺控指令执行的流程图。











