
技术摘要:
本发明涉及一种基于改进的智能模型预测控制的电动汽车空调系统智能控制方法,属于整车热管理技术领域,包括步骤:S1:建立汽车空调系统‑乘员舱耦合热模型;S2:基于汽车空调系统‑乘员舱耦合模型建立与之匹配的模型预测控制器;S3:基于神经网络建立车速预测器,通过 全部
背景技术:
随着世界能源危机和环境污染问题的日益严峻,人们对汽车的节能减排性能提出 了更高的要求。如今汽车工业向着电动化与智能化的方向发展,这些新技术的发展有利于 推进汽车节能减排,然而电动汽车与智能车的发展也面临过许多亟待解决的问题。我们知 道,汽车暖通空调系统(HAVC)能耗占汽车总能耗相当大一部分,对于电动汽车而言,空调系 统的能耗对其续航历程有重大影响,有关研究表明,电动汽车空调系统的能耗会使电动汽 车的续航历程平均下降30%-40%。为了提升汽车在行驶过程中的经济性,需要在各方面提 升空调效率性能。在智能性方面,由于汽车智能化发展需求,汽车空调需要做到比传统空调 更加智能来提升驾驶热舒适性。因此,如何减少电动汽车空调系统的能耗并且提高乘客的 舒适性,是如今电动汽车热管理系统研究的重点之一。另外,汽车智能空调系统的发展对与 无人驾驶汽车的研发工作的推进起到重要的辅助作用。 而智能现进的汽车空调系统能量管理决策器与控制器可保证汽车空调系统的运 行效率以及智能性。因此,如何进行控制决策是汽车空调系统的研究重点之一。与传统汽车 相比,电动汽车压缩机主要以电机带动的方式运行,由于电动压缩机的转速控制可以比较 精确且不受发动机转速的影响,所以压缩机转速控制可以根据实时需要进行调节,而不受 外界车速工况的影响。现在汽车空调系统主流的控制方法,是基于规则的开关控制器并根 据相应的查表的方式进行控制,或者PID控制,模糊控制等一些较为传统的方法。这些传统 的控制方法主要根据系统反馈,利用目标值与反馈值的差进行控制调节。此类型的控制方 法虽然简单,但是对于汽车系统而言,由于工况多变,且变化迅速,传统单单依靠的反馈信 号的方式的效果往往是有局限性的。另外,传统的纯反馈控制器没有涉及优化算法,因此在 面对多输入多输出系统,尤其像汽车空调系统时,各个控制量很难实现高效合理的搭配,使 得控制效果难以保证。而且当汽车工况迅速变化时,反馈回来的信号支持当前时间的系统, 但系统变状态变化迅速,当控制器最终作用在系统上时,往往已经不是最佳操作。或者说, 即使反馈信号对于当前来说是最佳操作,但对于未来长远来说却不一定是最佳操作。因此, 为了进一步提升控制器的效率与智能性,同时满足汽车空调系统多输入多输出控制需求, 需要用更为具有预测性的控制器。 模型预测控(MPC)制是目前先进的控制方法,通过建立被控系统的状态模型,预测 控制可以具有预测功能,能够根据系统的当前时刻的控制输入以及过程的历史信息,预测 过程输出的未来值。通过将模型预测控制与其他工况预测方法(如车速预测)相结合,能够 较好的对汽车未来状态进行预测,通过优化计算,从而即使给出最佳控制,使得整个控制过 程更为准确高效,实现效率与智能性的提升。同时,通过引入人体舒适性理论,将对人体热 7 CN 111597723 A 说 明 书 2/13 页 习惯的适应与分析引入控制器,可以使得控制系统更为人性化。目前对于人体热舒适性理 论研究较多,其中较为经典的方法是通过计算PMV(Predicted Mean Vote)值来表现人体热 舒适评价,其数值是以人体热平衡的基本方程式以及心理生理学主观热感觉的等级为出发 点,考虑了人体热舒适感诸多有关因素的全面评价指标。其指标从-3到 3,分别对应的是人 体从感觉冷到热的程度,当PMV=0,说明人体感觉热中性,也就是舒适值。在控制中,将模型 预测控制,车速预测,与人体舒适应理论结合,使得控制器能预先决策,得出最佳的控制温 度,并进行优化控制。在提升控制效果与节能效果的同时,能够人性化的处理不同个体的热 习惯问题,实现智能自动调节功能,此种技术方法正是未来智能汽车期望的发展技术。 目前,模型预测控制,车速预测与人体舒适性适应整合于一体的汽车空调系统控 制方法尚未出现。
技术实现要素:
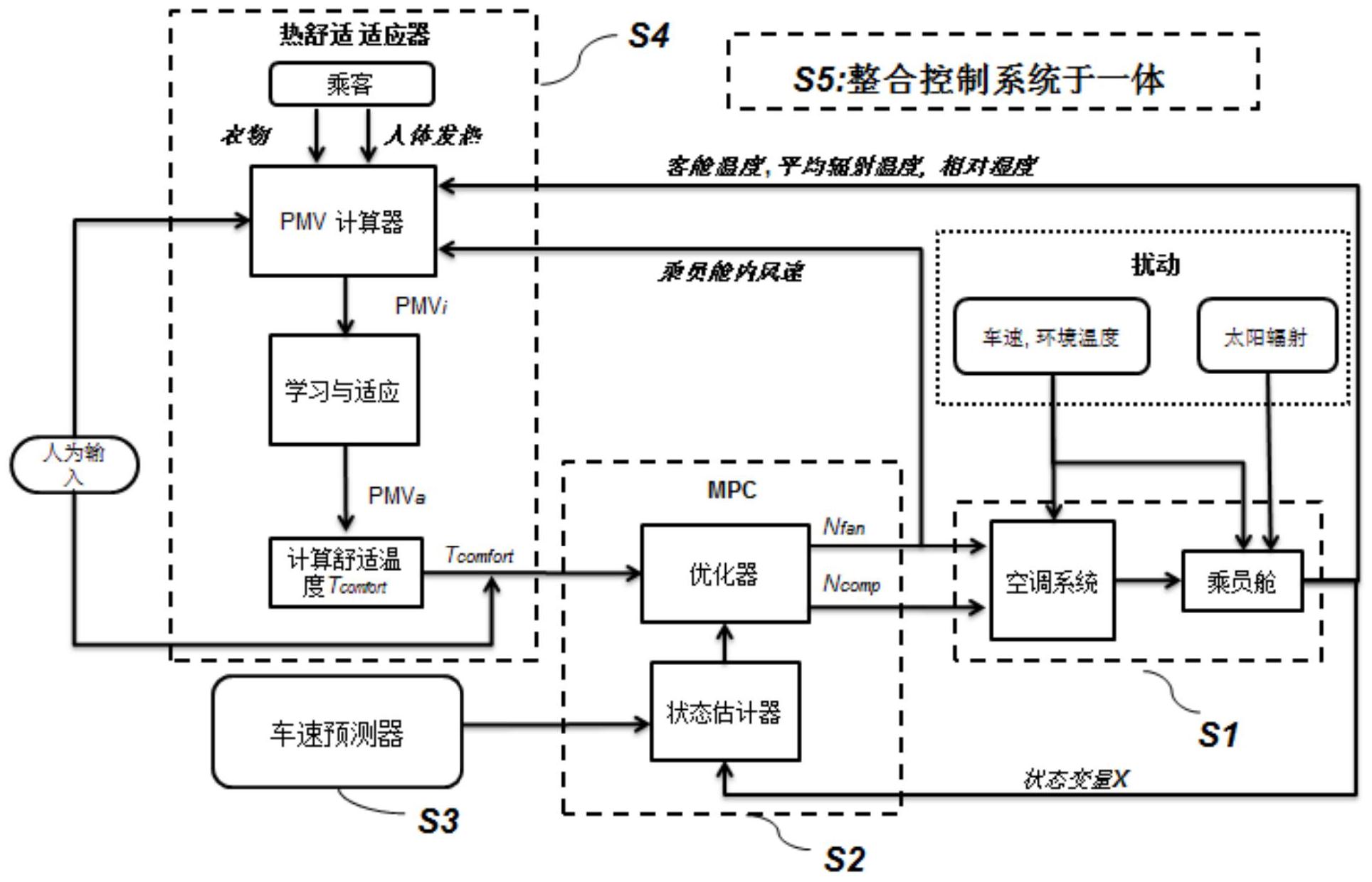
有鉴于此,本发明的目的在于提供一种结合模型预测控制和神经网络预测,以及 人体热舒适适应方法设计了具一种有预测能力的电动汽车空调系统智能舒适温度自动调 节的方法。 为达到上述目的,本发明提供如下技术方案: 一种基于改进的智能模型预测控制的电动汽车空调系统智能控制方法,包括以下 步骤: S1:建立汽车空调系统-乘员舱耦合热模型; S2:基于汽车空调系统-乘员舱耦合模型建立与之匹配的模型预测控制器; S3:基于神经网络建立车速预测器,通过利用历史车速来对未来车速进行预测; S4:基于PMV理论以及适应算法建立针对不同个体热习惯的适应器,并由此得出目 标舒适温度Tcomfort; S5:结合车速预测与热舒适适应,建立完整的针对于汽车空调系统的智能控制器。 进一步,所述步骤S1具体包括以下步骤: S11:建立一维汽车空调系统动态热数学模型,所述汽车空调系统包括压缩机,冷 凝器,蒸发器和膨胀阀,其中蒸发器与冷凝器的动态模型基于移动边界法建立; S12:建立简化的一维乘员舱系统动态热模型; S13:分别将空调系统中蒸发器空气侧进出口端与乘员舱的空气出口和进口端进 行耦合,形成空气循环。 进一步,步骤S11中所述一维汽车空调系统动态热数学模型包括: 1)建立压缩机内制冷剂一维动态模型,表示如下: 其中, 为压缩机的质量流率,ηv为容积效率,ρr为制冷剂密度,Ncomp为压缩机 转速,Vd为压缩机排量,hc,o为压缩机出口焓值,hc,i为压缩机进口焓值,his,o为压缩机等熵出 口焓值,ηis为等熵效率; 8 CN 111597723 A 说 明 书 3/13 页 2)对于膨胀阀,由于膨胀阀中的膨胀过程可看作是绝热过程,故其动态过程中,通 过膨胀阀制冷剂质量流量 与其膨胀阀压降ΔP的关系由下式表示: 其中,Cq为膨胀阀的流量系数,ρv为通过膨胀阀的制冷剂密度,Av为膨胀阀的最小 流通面积; 3)根据移动边界法,蒸发器中的气体和液体制冷剂满足质量守恒定律,故对于蒸 发器的两相区的长度le的变化由下式得到: 蒸发器中压力Pe随时间的变化表示为: 再根据能量守恒,蒸发器壁面温度的变化表示为: 其中,ρle是蒸发器中液体制冷剂的密度,hlge为蒸发器中制冷剂的气化潜热,Ae为 蒸发器的扁管微通道总的截面积, 为蒸发器两相区的平均空隙率,hge、hle和hie分别表示 在当前压力下蒸发器中气体、液体以及进口的制冷剂的焓值,aie是两相区中蒸发器内壁与 制冷剂间的换热系数,Die是蒸发器扁管内部的直径,Twe为蒸发器壁面温度,Tre是蒸发器当 前压力下制冷剂的饱和温度,Le是蒸发器扁管的总长度,(Cpm)we表示蒸发器材料的比热和 蒸发器的质量,ao是空气与蒸发器壁面间的换热系数,Aoe为蒸发器的迎风面积,Tae是当前蒸 发器周围空气的温度; 4)对于冷凝器,其换热原理与蒸发器相似,故有: 如果空调系统制冷剂没有泄露,则系统中总的制冷剂的质量不变,则蒸发器和冷 凝器中制冷剂总的质量视为常数,故有: 其中,ρlc是冷凝器中液体制冷剂的密度,hlgc为冷凝器中制冷剂的气化潜热,Ac为 冷凝器的扁管微通道总的截面积, 为冷凝器两相区的平均空隙率,hgc,hlc和hic分别表示 在当前压力下冷凝器中气体、液体以及进口制冷剂的焓值,aic是两相区中冷凝器内壁与制 冷剂间的换热系数,Dic冷凝器扁管内部的直径,Twc为冷凝器壁面温度,Trc是冷凝器当前压 力下制冷剂的饱和温度,Lc是冷凝器扁管的总长度,(Cpm)wc表示冷凝器材料的比热和冷凝 器的质量,aoc是空气与冷凝器壁面间的换热系数,Aoc为冷凝器的迎风面积,Tac是当前冷凝 9 CN 111597723 A 说 明 书 4/13 页 器周围空气的温度,即环境温度,∑表示常数; 冷凝器空气侧换热系数aoc主要由外部风速影响,在汽车行驶中,冷凝器外部风速 主要由车速影响,故aoc与车速的关系由实验拟合出,表示为: aoc=fp2(Vcar) 车速Vcar由驾驶员决定,而非空调系统控制器调节,在空调系统控制中,车速看作 为扰动输入。 进一步,步骤S12中所述一维乘员舱系统热模型包括: 汽车乘员舱的总热负荷 表示为: 在行车期间,车舱与外界对流换热量 主要受车速Vcar和环境温度Tac影响,并 且这两个变量是不受控制器控制的输入扰动,在换热模型中, 由下式计算: 其中Ts乘员舱外围的结构的温度,基于能量守恒,外围结构的温度的动态变化由 下式表达: 由能量守恒可知,乘员舱的空气温度动态变化表示为: 其中, 为车身表面结构的换热, 为太阳辐射热负荷, 为通风引起 的热负荷, 为人体热负荷, 为机械和仪表热负荷;Tcab为汽车车舱的温度, 为单位 时间空调系统传入客舱的制冷量,Ma为汽车车舱体积范围内的空气质量,cpa为空气比热,ho 是外部车舱外围结构外侧与空气侧的换热系数,主要由车速决定,S汽车车舱外表面结构的 总的表面积.hi为汽车车舱内表面与空气的换热系数,Ms和Cps分别是车舱外围封闭结构的 的质量和比热; 通过以上数学模型,建立乘员舱和空调系统的耦合动态模型,模型中的状态变量 表示为: X=[le Pe Twe P T T T ]Tc wc s a 。 进一步,所述步骤S2具体包括以下步骤: S21:建立模型预测控制中的状态估计器,根据所建立的汽车空调和乘员舱模型, 在线性化处理后,其系统由以下状态空间式表达: x(k i│k)=Ax(k i-1│k) Buu(k i-1│k) Bvv(k i-1│k) y(k i│k)=Cx(k i-1│k) 上式中,x为状态变量矩阵,u和v分别表示操纵变量矩阵和扰动输入矩阵,分别为: u=[N N ]Tcomp fan S22:建立模型预测控制器的优化器; 10 CN 111597723 A 说 明 书 5/13 页 MPC控制器中的优化器包含寻优算法,找寻目标函数的最优解,保证代价函数最 小,优化器的主要作用是寻找一组最优解来满足控制精确的同时,尽可能的降低控制代价; 首先,总的代价函数由下式表示: J(Zk)=Jy(Zk) Ju(Zk) JΔu(Zk) 其中,Jy,Ju,JΔu分别表示控制温度的追踪误差的代价函数,控制量大小的代价函 数以及控制量变化大小的代价函数;对于当前时刻k,若控制时域为c,三个代价函数分别由 下式表示: 其中,i表示时间顺序的计算步长,且有i∈[1,c];i,c∈N;ny,nu分别表示控制输出 和控制输出入的数量; 分别表示y,u,Δu的第j个控制输出在第i个时间步 长下的权值;Zk表示对上述目标函数的正二次规划的决策输出序列,二次规划优化的目标 函数和约束条件由以下形式表示: min J(Zk) s.t.0≤Ncomp≤6000r/min 0≤Nfan≤3000r/min 0≤Twe≤10℃ 通过求解二次规划,在控制时域为c时,得到Zk的值,其值形式为: 为了保证实时控制的精确性,在矩阵Zk中,只有第一个元素作为MPC控制器实际的 输出。 进一步,步骤S3中具体包括以下内容: 利用神经网络的方法来对车速进行预测,原理上是基于预测的车速目标值与实际 值的误差,通过更改神经网络内各个权值(训练)来不断增强神经网路预测的准确度,最终 达到较为准确的输出值。对于车速预测神经网络结构,输入层包括历史车速矩阵、平均速度 矩阵、去除0的平均速度矩阵、平均加速度矩阵和平均减速度矩阵;对于预测时域τ,五个输 入矩阵按顺序记为x1,τ,x2,τ,x3,τ,x4,τ和x5,τ,总的输入层表示为: Xτ=[x1,τ x2,τ x3,τ…x5,τ] 在所使用的两层神经网络中,未来第τ时秒时刻的预测车速vτ与输入的关系表示 为: 对于输出层,未来的预测车速是唯一的输出,并且对于预测时域τ,车速预测输出 11 CN 111597723 A 说 明 书 6/13 页 层由下式表示: V=[v1 v2 v3…vτ] 其中i表示输入变量的数量,w0no和w1n1分别表示第一层神经元的n0个神经元和第 二层神经元的第n1个神经元的权重系数,b0n0和b1n1分别表示第一层神经元的n0个神经元 和第二层神经元的第n1个神经元的偏值; 通过神经网络层层反复迭代,算法不断自动调整各个神经元的权重与偏值,使得 神经网络预测更为准确地通过当前信息预测未来车速。 进一步,步骤S4具体包括以下内容: 基于人体热舒适理论建立乘员舱内当前PMV值的估计器,并通过外部环境条件计 算出此时乘员舱的PMV值,PMV值的计算公式为: PMV=Ts(M-φ1-φ2-φ3-φ4-φ5-φ6) 其中,TS=0.303e-0.036M 0.028, φ =3.05e-31 5733-6.99M-Pw, φ =1.7e-53 M(5867-Pw), φ =1.4e-34 M(34-Ta), φ =3.96e-8f ((T 4 45 cl cl 273) -(Tr 273) ), φ6=fclhc(Tcl-Ta), Tcl=35.7-0.028M-Icl(φ5 φ6); 其中,M为乘客的新陈代谢率,Pw为水蒸气分压力,Ta为乘员舱空气温度,Tr为驾驶 室内平均辐射温度,Tcl为衣服表面温度,hc为人体表面对流换热系数,Icl为乘客衣服的热 阻,Va为乘员舱空气流速; 在得到的实时PMV值后,在系统控制已经达到稳态条件下,记录驾驶员每次调节后 控制进入稳态时的PMV值,将第i次记录下的PMV值记为PMVi; 通过PMVi用以下公式计算PMVa: 其中,N表示采样的周期; 所述MPC控制器使得被控系统的输出去追踪控制目标值,及目标乘员舱温度,为了 将适应后的舒适温度嵌入MPC控制器,舒适温度计算器需要计算出一序列的舒适温度以便 MPC进行优化计算。因此,对于控制时刻k,由下式计算连续的目标舒适温度序列: 12 CN 111597723 A 说 明 书 7/13 页 上式中,Φ5,hc随着系统状态变量变化而改变,根据定义,为了合理简化计算,其他 参数设置为常数;通过适应计算,所得的目标舒适温度通过将Trc(k i|k)替换步骤S2中的替 换步骤S2目标函数Jy中的r(k i|k)接入MPC优化器。 本发明的有益效果在于:在控制中,将模型预测控制,车速预测,与人体舒适应理 论结合,使得电动汽车在不同的行驶工况下,控制器能根据当前的信息,对未来系统状态进 行预测,并通过最优化算法进行最优控制量决策。通过神经网络的预测方法得出未来最有 可能的汽车车速工况,再结合人体舒适理论,适应得出最舒适温度作为未来的目标控制量, 再带入模型预测控制器进行预测控制。此方法能有效处理控制不及时以及舒适温度无法保 证的问题,能够节省时变工况下的能量,提升控制效果。并且提升控制效率与效果的同时, 能够人性化的处理不同个体的热习惯问题,实现智能自动调节功能,使得整个控制过程更 为合理,高效,人性化,智能化。具体优点有: 1)对于多输入多输出空调系统,本发明利用模型预测控制对控制系统状态预测, 并且利用优化算法对系统进行了优化控制,使得控制系统能够更好地根据需要合理地分别 压缩机和风扇的控制量,实现更好地控制效果与节能性,同时使得控制更为及时,可以更好 的解决了因工况变化迅速而改变控制输出。 2)利用神经网络预测对汽车车速情况进行预测,使得系统能够提前获得未来的最 有可能的车速情况,让汽车工况信息能提前输入控制器,使得控制器对系统状态的判断更 为准确,从而更好地进行决策,提升控制器预测能力与控制效果。 3)本发明通过简单的算法对驾驶员舒适调节进行适应,并利用适应后PMV指标计 算出实时工况下最舒适的目标温度,然后将舒适温度导入控制器作为目标控制温度,使得 汽车空调系统能够根据个人以往的热调节习惯进行自动调节,从而实现汽车空调系统实时 最舒适目标温度的自调节与跟踪,达到舒适和节能的双重效果。 4)本发明相较于传统算法,更为智能,节能,适合运用在未来智能网联汽车中,提 升智能网联汽车整车热管理系统的节能化与智能化能力。 本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并 且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可 以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和 获得。 附图说明 为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优 选的详细描述,其中: 图1为本发明的智能控制器的整体控制逻辑简图; 图2为汽车动态空调系统与乘员舱结构一维热耦合模型结构简图; 图3为乘员舱与外界空气以及舱内空气的换热示意图; 图4为两层神经网络车速预测原理图; 13 CN 111597723 A 说 明 书 8/13 页 图5为舒适温度适应计算与乘员舱舒适温度控制流程图; 图6为PMV计算的影响因素图。











