
技术摘要:
本申请公开了一种用于电机的驱动控制系统、汽车和控制方法,包括:脉宽反馈模块对脉宽信号滤波,得到脉宽输入信号,发送至处理模块;相位反馈模块对相位信号滤波,得到相位输入信号,发送至处理模块;位置反馈模块对位置信号滤波,得到位置输入信号,发送至处理模块; 全部
背景技术:
目前,汽车领域中几乎所有采用电机驱动的控制系统都是电机和位置探测分离设 计,例如在执行机构上面加一个独立的霍尔角度传感器。或者在换挡电机中集成霍尔芯片 输出固定占空比的方波。这种方案由于机构间隙导致位置反馈不精准,并且无法兼容有刷 和无刷电机。 因此,需要提供一种能准确识别电机位置,还能够兼容有刷和无刷电机,并且驱动 控制简单的驱动控制系统、汽车和控制方法。
技术实现要素:
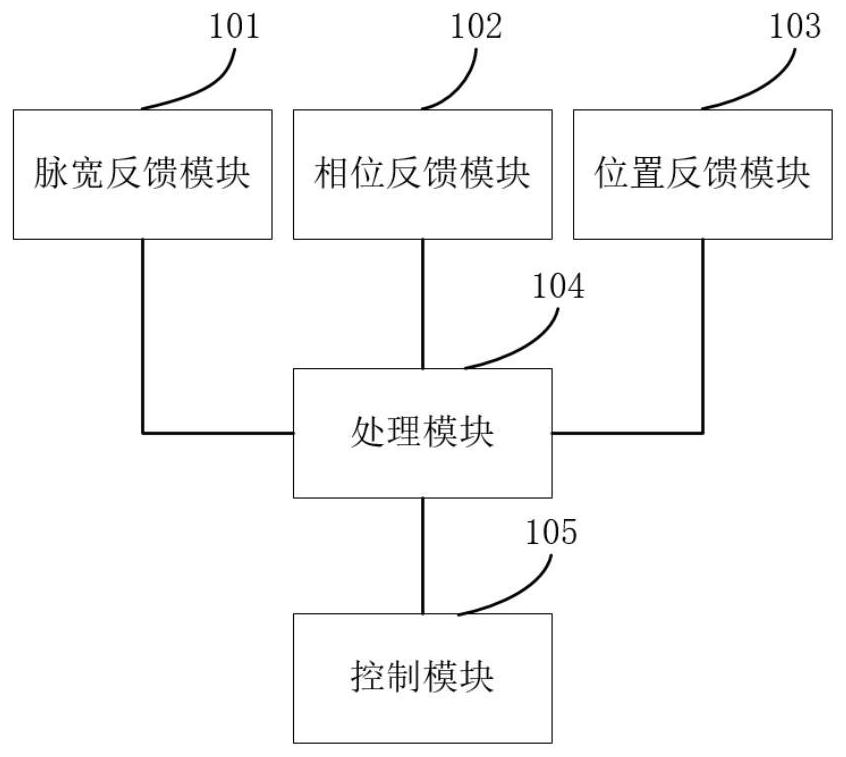
为解决以上问题,本申请提出了一种用于电机的驱动控制系统、汽车和控制方法。 一方面,本申请提出一种用于电机的驱动控制系统,包括:脉宽反馈模块、相位反 馈模块、位置反馈模块、处理模块和控制模块; 所述脉宽反馈模块,用于对接收到的脉宽信号滤波,得到脉宽输入信号,发送至处 理模块; 所述相位反馈模块,用于对接收到的相位信号滤波,得到相位输入信号,发送至处 理模块; 所述位置反馈模块,用于对接收到的位置信号滤波,得到位置输入信号,发送至处 理模块; 所述处理模块,用于分别确定接收到的所述脉宽输入信号和所述相位输入信号的 绝对角度,校验后确定无刷直流电机的占空比,发送至控制模块,或根据接收到的位置输入 信号,确定绝对位置,校验后确定有刷直流电机的占空比,发送至控制模块; 所述控制模块,用于根据所述有刷直流电机的占空比或无刷直流电机的占空比控 制电机转动。 优选地,所述处理模块具体用于, 根据所述脉宽输入信号的波形确定初始角度;根据所述初始角度确定脉宽绝对角 度;根据所述相位输入信号确定相位绝对角度;使用脉宽绝对角度和相位绝对角度进行相 互校验,若脉宽绝对角度和相位绝对角度之差在阈值范围内,则根据脉宽绝对角度和电机 目标位置,使用PID运算,确定无刷直流电机的占空比,发送至控制模块; 或根据所述位置输入信号,确定绝对位置;对绝对位置与位置异常阈值进行校验, 若绝对位置无异常,则根据绝对位置和电机目标位置,使用PID运算,确定有刷直流电机的 占空比,发送至控制模块。 优选地,所述处理模块还用于,若脉宽绝对角度和相位绝对角度之差不在阈值范 4 CN 111600516 A 说 明 书 2/7 页 围内,或绝对位置有异常,则将标定占空比发送至控制模块。 优选地,所述脉宽输入信号的波形为方波。 优选地,所述初始角度的波形包括锯齿波。 优选地,所述相位输入信号为数字信号。 第二方面,本申请提出一种汽车,包括:上述的系统和电机; 所述电机包括脉宽信号反馈接口和霍尔信号反馈接口。 第三方面,本申请提出一种用于电机的驱动控制方法,包括: 对接收到的脉宽信号滤波,得到脉宽输入信号,对接收到的相位信号滤波,得到相 位输入信号,或对接收到的位置信号滤波,得到位置输入信号; 分别确定接收到的所述脉宽输入信号和所述相位输入信号的绝对角度,校验后确 定无刷直流电机的占空比,或根据接收到的位置输入信号,确定绝对位置,校验后确定有刷 直流电机的占空比; 根据所述有刷直流电机的占空比或无刷直流电机的占空比控制电机转动。 优选地,所述分别确定接收到的所述脉宽输入信号和所述相位输入信号的绝对角 度,校验后确定无刷直流电机的占空比,包括: 根据所述脉宽输入信号的波形确定初始角度; 根据所述初始角度确定脉宽绝对角度; 根据所述相位输入信号确定相位绝对角度; 使用脉宽绝对角度和相位绝对角度进行相互校验; 若脉宽绝对角度和相位绝对角度之差在阈值范围内,则根据脉宽绝对角度和电机 目标位置,使用PID运算,确定无刷直流电机的占空比; 若脉宽绝对角度和相位绝对角度之差不在阈值范围内,则将标定占空比发送至控 制模块。 优选地,所述根据接收到的位置输入信号,确定绝对位置,校验后确定有刷直流电 机的占空比,包括: 根据所述位置输入信号,确定绝对位置; 对绝对位置与位置异常阈值进行校验; 若绝对位置无异常,则根据绝对位置和电机目标位置,使用PID运算,确定有刷直 流电机的占空比; 若绝对位置有异常,则将标定占空比发送至控制模块。 本申请的优点在于:通过脉宽反馈模块、相位反馈模块和位置反馈模块,能够根据 电机的不同,获取不同的输入信号,兼容有刷和无刷电机;处理模块能够根据接收到的输入 信号,确定无刷直流电机或有刷直流电机的占空比,发送至控制模块,驱动控制简单;通过 确定绝对角度或绝对位置,进行校验,确定占空比,能准确识别电机位置。 附图说明 通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通 技术人员将变得清楚明了。附图仅用于示出优选事实方案的目的,而并不认为是对本申请 的限制。而且在整个附图中,用同样的参考符号表示相同的部件。在附图中: 5 CN 111600516 A 说 明 书 3/7 页 图1是本申请提供的一种用于电机的驱动控制系统的示意图; 图2是本申请提供的另一种用于电机的驱动控制系统的示意图; 图3是本申请提供的一种用于电机的驱动控制系统的相位信号示意图; 图4是本申请提供的一种用于电机的驱动控制系统的不同占空比的脉宽反馈原理 示意图; 图5(a)是本申请提供的一种用于电机的驱动控制系统的脉宽输入信号的波形示 意图; 图5(b)是本申请提供的一种用于电机的驱动控制系统的初始角度的波形示意图; 图5(c)是本申请提供的一种用于电机的驱动控制系统的脉宽绝对角度的波形示 意图; 图6是本申请提供的一种用于电机的驱动控制系统的流程示意图; 图7是本申请提供的一种电机的接口示意图; 图8是本申请提供的一种用于电机的驱动控制方法示意图; 图9是本申请提供的一种用于电机的驱动控制系统的脉宽反馈模块的电路图; 图10是本申请提供的一种用电机的驱动控制系统的相位反馈模块的电路图; 图11是本申请提供的一种用于电机的驱动控制系统的位置反馈模块的电路图。 附图标记说明 GND系统参考接地端 EGND电气接地端 PULSE脉宽信号 PULSE DI数字脉宽信号 HA相位信号 HA_DI数字相位信号 A1位置信号 A1 AI位置输入信号 U处理单元 A处理单元输入端 VCC处理单元的电源端 Y处理单元的输出端 Q1三极管 V5D 5V电源端 R1第一电阻 R2第二电阻 R3第三电阻 R4第四电阻 R5第五电阻 C1第一电容 C2第二电容 C3第三电容 C4第四电容 C5第五电容 C6第六电容 D1第一二极管 D2第二二极管 D3第三二极管 D4第四二极管











