
技术摘要:
本发明公开了一种悬挂装置以及具有该悬挂装置的底盘和机器人。所述底盘包括:弹性件,所述弹性件的第一端部能够与底盘的底板相连;和摆臂,所述摆臂能够可旋转地设在所述底板上,所述摆臂的第一端部与所述弹性件的第二端部相连,所述摆臂的第二端部能够与所述底盘的主 全部
背景技术:
相关技术中的机器人在地面上行走时不可避免地遇到障碍物。当障碍物较高时, 为了避免机器人翻倒,只能绕过障碍物前进。这极大地限制了机器人的应用范围,给用户的 使用带来不便。
技术实现要素:
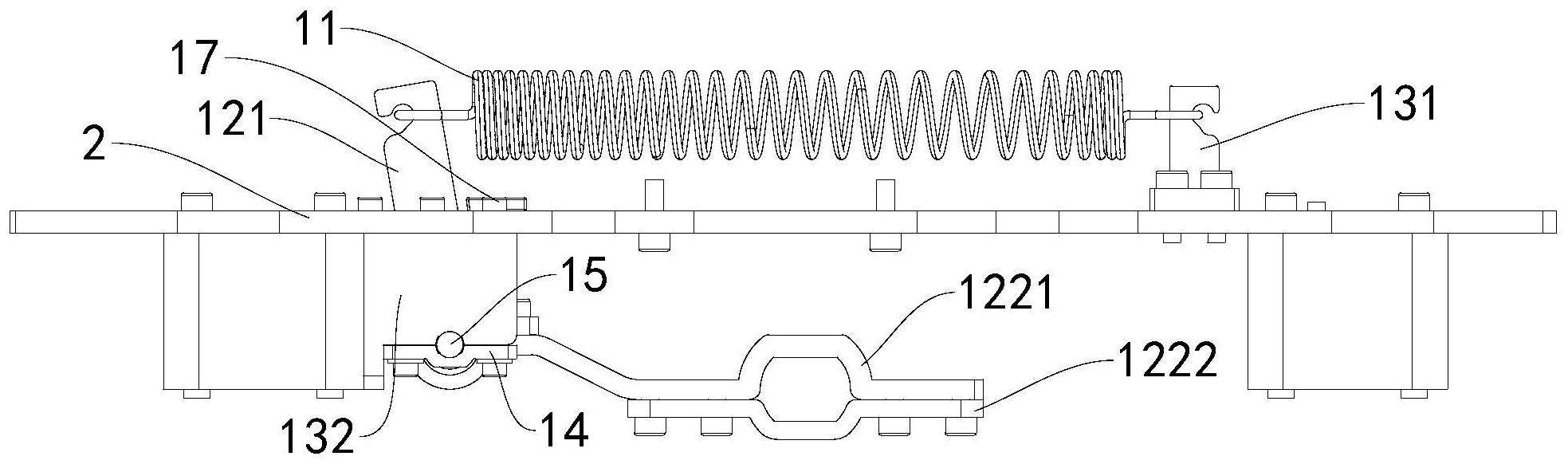
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明提 出一种悬挂装置以及具有该悬挂装置的底盘和机器人。 根据本发明的悬挂装置包括:弹性件,所述弹性件的第一端部能够与底盘的底板 相连;和摆臂,所述摆臂能够可旋转地设在所述底板上,所述摆臂的第一端部与所述弹性件 的第二端部相连,所述摆臂的第二端部能够与所述底盘的主动轮相连,其中所述弹性件处 于形变状态以便所述弹性件能够通过所述摆臂对所述主动轮施加向下的作用力。 通过利用根据本发明的悬挂装置,从而可以使包括该悬挂装置的底盘具有越障能 力强的优点。 可选地,所述悬挂装置进一步包括第一安装基座,所述第一安装基座能够设在所 述底板的上表面上,所述弹性件的第一端部与所述第一安装基座相连。 可选地,所述第一安装基座能够沿前后方向可移动地设在所述底板的上表面上, 所述弹性件沿前后方向延伸。 可选地,所述底板上设有通孔,所述通孔沿上下方向贯通所述底板,所述摆臂包 括:连接部,所述连接部沿上下方向延伸,所述连接部的上端部能够向上穿过所述通孔,所 述弹性件的第二端部与所述连接部的上端部相连;和下压部,所述下压部沿前后方向延伸, 所述下压部的前端部和后端部中的一者与所述连接部的下端部相连,所述下压部的所述前 端部和所述后端部中的另一者能够与所述底盘的电机的电机轴相连,所述电机的电机轴与 所述主动轮相连。 可选地,所述悬挂装置进一步包括限位件,所述限位件能够可上下移动地或可前 后移动地设在所述底板上,所述限位件在前后方向上能够位于所述连接部的所述上端部与 所述电机轴之间,其中所述限位件的一部分能够位于所述通孔的内侧,所述连接部抵靠在 所述限位件的所述一部分上。 可选地,所述下压部包括本体和第一压板,所述第一压板可拆卸地设在所述本体 上,所述电机轴能够夹持在所述本体与所述第一压板之间。 可选地,所述悬挂装置进一步包括安装轴,所述安装轴能够设在所述底板上,所述 安装轴沿左右方向延伸,所述摆臂套设在所述安装轴上。 4 CN 111591096 A 说 明 书 2/11 页 可选地,所述悬挂装置进一步包括:第二安装基座,所述第二安装基座能够设在所 述底板的下表面上;和第二压板,所述第二压板可拆卸地设在所述第二安装基座上,所述安 装轴夹持在所述第二安装基座与所述第二压板之间。 可选地,所述悬挂装置进一步包括轴承,所述轴承套设在所述安装轴上,所述轴承 在所述安装轴的轴向上位于所述第二压板与所述摆臂之间。 根据本发明的底盘包括:底板;电机,所述电机设在所述底板上;主动轮,所述主动 轮与所述电机的电机轴相连;和悬挂装置,所述悬挂装置为根据本发明的悬挂装置,所述悬 挂装置包括弹性件和摆臂,所述弹性件的第一端部与所述底板相连,所述摆臂可旋转地设 在所述底板上,所述摆臂的第一端部与所述弹性件的第二端部相连,所述摆臂的第二端部 与所述主动轮相连,其中所述弹性件处于形变状态以便所述弹性件通过所述摆臂对所述主 动轮施加向下的作用力。 根据本发明的底盘具有越障能力强的优点。 根据本发明的机器人包括根据本发明的底盘。 根据本发明的机器人具有越障能力强的优点。 附图说明 图1是根据本发明实施例的底盘的局部结构示意图; 图2是根据本发明实施例的底盘的局部侧视图; 图3是根据本发明实施例的底盘的局部仰视图; 图4是根据本发明实施例的底盘的局部后视图; 图5是根据本发明实施例的底盘的局部结构示意图; 图6是根据本发明实施例的底盘的局部俯视图; 图7是根据本发明实施例的底盘的局部仰视图; 图8是根据本发明实施例的底盘的局部侧视图; 图9是根据本发明实施例的底盘的局部爆炸图; 图10是根据本发明实施例的底盘的脚轮的结构示意图; 图11是根据本发明实施例的底盘的脚轮的结构示意图; 图12是根据本发明实施例的底盘的脚轮的第一支架的结构示意图; 图13是根据本发明实施例的底盘的脚轮的第二支架的结构示意图; 图14是根据本发明实施例的底盘的脚轮的局部结构示意图; 图15是根据本发明实施例的底盘的脚轮的轮壳的结构示意图; 图16是根据本发明实施例的底盘的雷达的扫描角度示意图。











