
技术摘要:
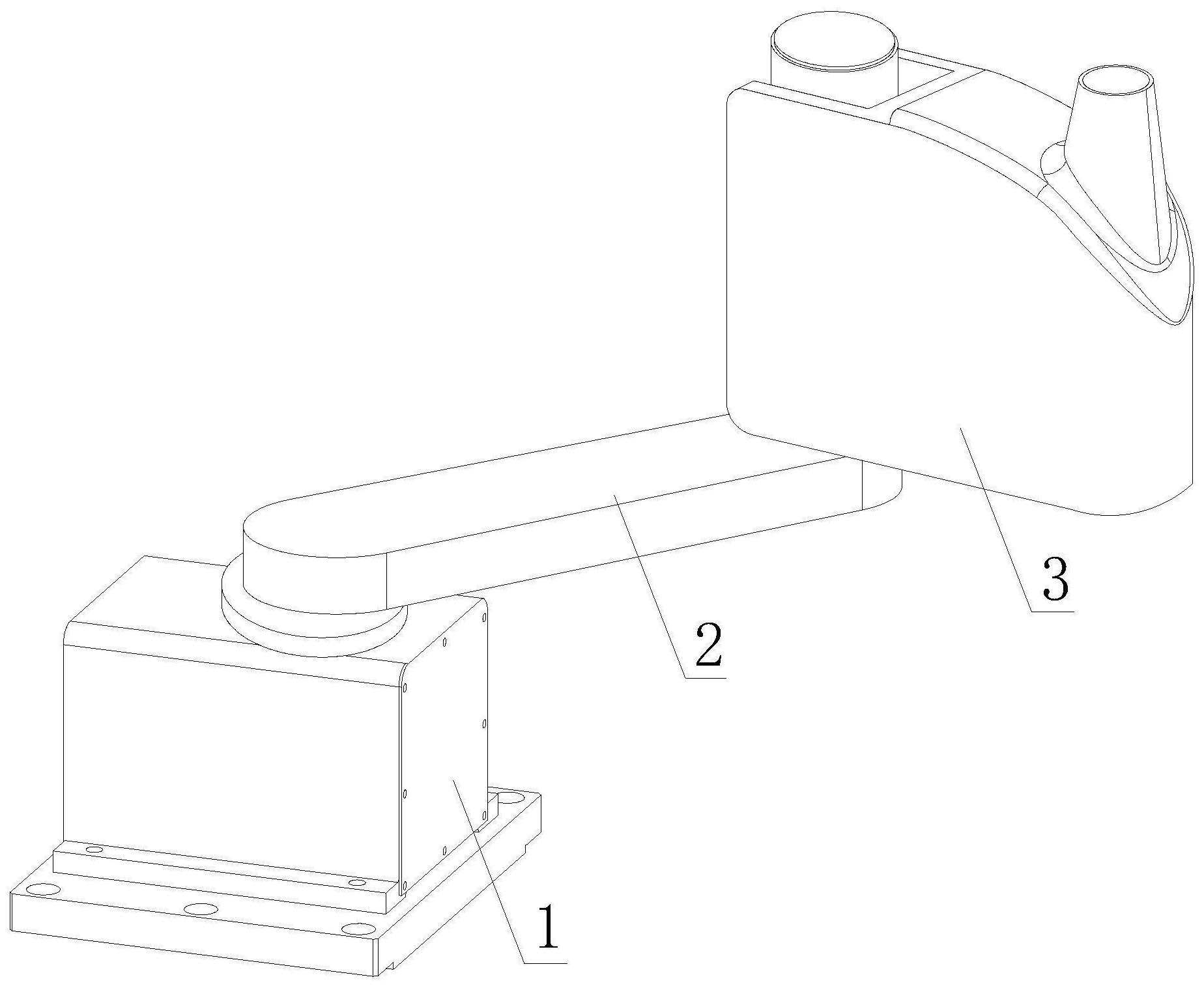
本发明公开了一种适用于高负载的横向搬运机器臂及方法,包括基座、力臂和操作臂,所述基座包括底板、机壳、电机A、中轴、底盘和轴台;所述操作臂包括外壳、电机B和连接盘B。所述机壳安装于底板上,所述电机A安装于机壳内的一端,并且电机A的输出轴上安装齿轮A,所述中 全部
背景技术:
随着生产科技的进步,货物的产出效率越来越高,与其带来的货物搬运存放工作 量则越来越大;目前的大多数企业,对货物的搬运存放还处人力阶段,但当产出的货物较重 时,人力搬运明显不便,且安全性差,容易发生安全事故;为此,搬运机器成为企业提高货物 搬运效率、扩大生产规模的首选。 横向搬运机器人是生产线常用智能设备之一,可将货物从一个位置横向移到另一 个位置;但传统横向搬运机器人横向活动范围有限,并且负载能力低,因而无法满足企业生 产的多元化需求。
技术实现要素:
本发明的目的在于提供一种适用于高负载的横向搬运机器臂及方法,实现机器臂 的横向活动搬运功能,并且力臂和操作臂采用高强度的合金钢板加工制成,从而具备高负 载下的承压能力,故而满足企业生产的多元化需求,可以解决上述











