
技术摘要:
本发明提供了一种自主代客泊车感知决策方法、系统以及车载终端,自主代客泊车感知决策方法包括:建立第一车载终端与至少一个第二车载终端的通信连接;第一车载终端接收第二车载终端发送的第二感知目标信息;第一车载终端获取第一感知目标信息;第一车载终端根据第一感 全部
背景技术:
在由众多原因导致的交通事故中,由于视线遮挡和盲区,而引发的交通问题占据 了相当大的比例。由于车辆自身结构,车上部分位置会对驾驶员带来一定范围的视觉盲区, 这将对驾驶员安全驾驶产生非常严重的影响。 在低速泊车工况下,前车及周围车辆遮挡产生的视觉盲区更为严重,由于视觉盲 区的存在,后车无法及时发现前方及周围车辆、行人等障碍物,对于行车安全产生极大的隐 患。现有泊车技术的感知方案一般为多传感器异构的融合感知方案,通过在车身安装两种 及以上感知传感器,覆盖车辆周围不等范围,实现对特定目标和环境的感知。但即使使用异 构冗余的方案,由于不同种类传感器的感知范围和适用环境存在较大差异,对不同种类目 标的探测性能差异较大,同时存在明显的感知缺陷,导致仍然无法在感知范围和可靠性上 达到预期水平。 因此,亟需一种代客泊车感知决策方法、系统以及车载终端能够结合V2V技术将自 车感知范围扩大到通信范围内的群体感知范围,突破了自车感知范围限制,大大扩展了感 知区域,并且对即将进入自车感知区域的目标实现超前响应,还可以结合周围车辆的决策 信息可以实现自车横纵向预控制。
技术实现要素:
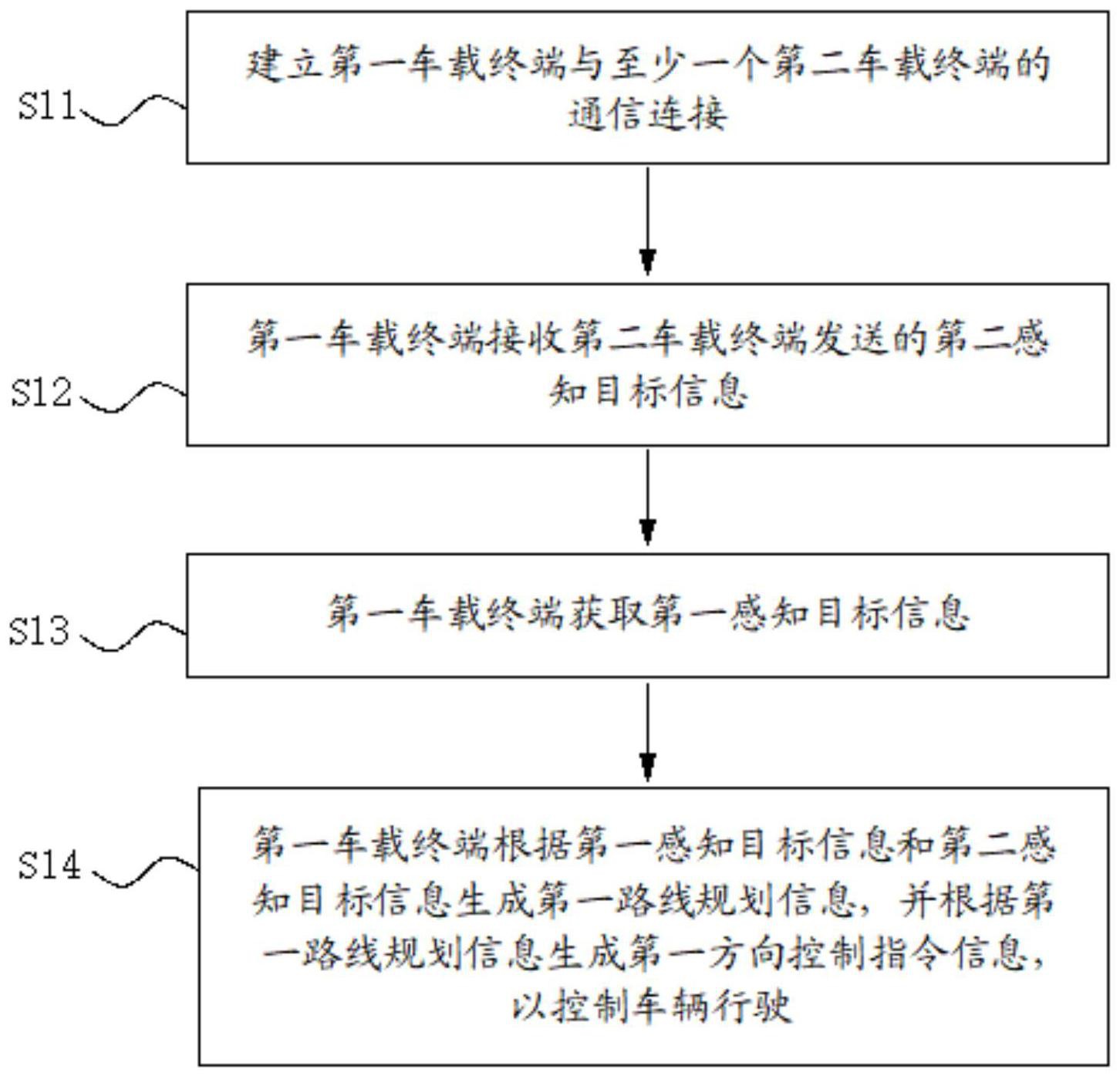
本发明解决的技术问题在于,提供了一种自主代客泊车感知决策方法、系统以及 车载终端,能实现对自车感知盲区内目标的探测,通过持续获取通信范围内其他车辆共享 的动态目标的基本信息,可以实现对超感知范围内动态目标的持续追踪和运动态势预测, 基于自车轨迹路线判断与目标的相对运动关系,进而对有风险的动态目标进行提前响应, 做到更早更精准的规划控制,提升了感知系统的可靠性,降低了碰撞风险。 本发明解决其技术问题是采用以下的技术方案来实现的: 一种自主代客泊车感知决策方法,包括:建立第一车载终端与至少一个第二车载 终端的通信连接;第一车载终端接收第二车载终端发送的第二感知目标信息;第一车载终 端获取第一感知目标信息;第一车载终端根据第一感知目标信息和第二感知目标信息生成 第一路线规划信息,并根据第一路线规划信息生成第一方向控制指令信息,以控制车辆行 驶。 在本发明的较佳实施例中,上述建立第一车载终端与至少一个第二车载终端的通 信连接的步骤包括:获取第一车载终端的位置信息;获取第一车载终端预设范围内的第二 车载终端信息,建立第一车载终端与第二车载终端的通信连接。 在本发明的较佳实施例中,上述第一车载终端获取第一感知目标信息的步骤包 4 CN 111599200 A 说 明 书 2/6 页 括:第一车载终端通过车载传感器采集第一感知目标信息,车载传感器至少包括摄像头、超 声波雷达、毫米波雷达、激光雷达中的一种。 在本发明的较佳实施例中,上述第一车载终端根据第一感知目标信息和第二感知 目标信息生成第一路线规划信息,并根据第一路线规划信息生成第一方向控制指令信息, 以控制车辆行驶的步骤包括:第一车载终端根据第一感知目标信息和第二感知目标信息获 取第一车载终端所在区域内的第三感知目标信息。 在本发明的较佳实施例中,上述第一车载终端根据第一感知目标信息和第二感知 目标信息生成第一路线规划信息,并根据第一路线规划信息生成第一方向控制指令信息, 以控制车辆行驶的步骤包括:第一车载终端根据第一感知目标信息、第二感知目标信息和 车辆当前的行车路线信息判断是否会发生碰撞,第一感知目标信息和第二感知目标信息中 包括感知目标的相对运动信息;在第一车载终端会与第一感知目标信息或第二感知目标信 息中的任一目标发生碰撞时,根据第二感知目标信息和第一感知目标信息生成第一路线规 划信息。 在本发明的较佳实施例中,上述第一车载终端根据第一感知目标信息和第二感知 目标信息生成第一路线规划信息,并根据第一路线规划信息生成第一方向控制指令信息, 以控制车辆行驶的步骤之后包括:第一车载终端将第一感知目标信息、第一路线规划信息 以及第一方向控制指令信息发送至第二车载终端。 一种自主代客泊车感知决策方法,包括:建立第一车载终端与至少一个第二车载 终端的通信连接;第一车载终端接收第二车载终端发送的第二感知目标信息和第二行车信 息,第二行车信息包括第二路线规划信息和第二方向控制指令信息;第一车载终端获取第 一感知目标信息;第一车载终端根据第一感知目标信息、第二感知目标信息以及第二行车 信息生成第一路线规划信息,并根据第一路线规划信息生成第一方向控制指令信息,以控 制车辆行驶。 在本发明的较佳实施例中,上述第一车载终端根据第一感知目标信息、第二感知 目标信息以及第二行车信息生成第一路线规划信息,并根据第一路线规划信息生成第一方 向控制指令信息,以控制车辆行驶的步骤包括:第一车载终端根据第一感知目标信息和第 二感知目标信息获取第一车载终端所在区域内的第三感知目标信息,第三感知目标信息包 括感知目标的相对运动信息;第一车载终端根据感知目标的相对运动信息、第二行车信息 以及车辆当前的行车路线信息判断当前车辆是否会发生碰撞;若会发生碰撞,则根据第三 感知目标信息和第二行车信息生成第一路线规划信息;若不会发生碰撞,则继续根据当前 行车路线信息行驶。 一种自主代客泊车感知决策系统,包括:第一车载终端和至少一个第二车载终端; 第一车载终端与至少一个第二车载终端的通信连接后,接收第二车载终端发送的第二感知 目标信息,并获取第一感知目标信息,再根据第一感知目标信息和第二感知目标信息生成 第一路线规划信息,并根据第一路线规划信息生成第一方向控制指令信息,以控制车辆行 驶;第二车载终端与第一车载终端建立连接后,向第一车载终端发送第二感知目标信息。 一种车载终端,包括:感知单元、处理单元、控制单元和交互单元;感知单元,用于 采集车身周围的感知目标信息,并将感知目标信息发送到处理单元;处理单元,用于接收自 车的感知目标信息,以及其它车载终端发送的感知目标信息和决策信息,生成决策信息发 5 CN 111599200 A 说 明 书 3/6 页 送到控制单元;控制单元,用于根据决策信息向车载设备发送执行指令;交互单元,用于与 其它车载终端建立连接,并接收或发送感知目标信息和决策信息。 本发明采用上述技术方案达到的技术效果是:在自车感知基础上,通过与通信范 围内的车辆交换感知目标信息,从而从空间上拓展了自车感知区域,实现对自车感知盲区 内目标的探测,同时对共同探测到的目标进行二次校验确认,增加了目标感知的置信度,提 升了感知系统的鲁棒性和可靠性;并且通过持续收集通信范围内其他车辆共享的动态目标 的基本信息,可以实现对超感知范围内动态目标的持续追踪和运动态势预测,基于自车轨 迹路线判断与目标的相对运动关系,进而对有风险的动态目标进行提前响应,做到更早更 精准的规划控制。 上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段, 而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够 更明显易懂,以下特举较佳实施例,并配合附图,详细说明。 附图说明 图1为本发明的第一实施例自主代客泊车感知决策方法的流程图; 图2为本发明的第二实施例自主代客泊车感知决策方法的流程图; 图3为本发明的第三实施例自主代客泊车感知决策系统的结构示意图; 图4为本发明的第四实施例车载终端的结构示意图。











