
技术摘要:
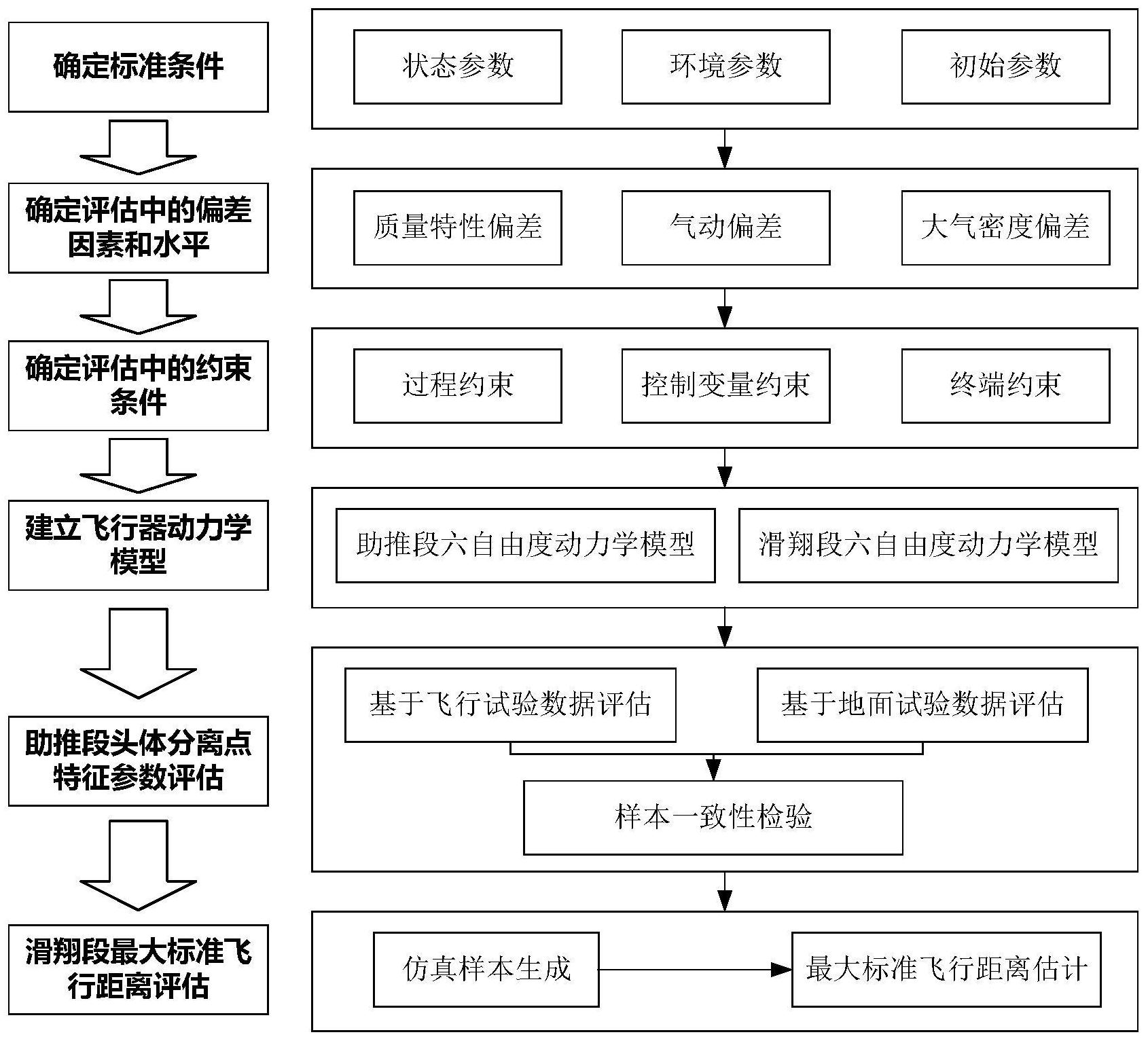
本发明公开一种助推‑滑翔式飞行器最大飞行距离能力评估方法,属于航空航天技术领域。所述最大飞行距离能力评估方法包括以下几个步骤:1、确定标准条件;2、确定评估中的偏差因素和水平;3、确定评估中的约束条件;4、建立飞行器动力学模型;5、助推段头体分离点特征参 全部
背景技术:
助推-滑翔式飞行器是一种利用火箭助推,弹头在大气层内靠气动升力进行滑翔 飞行的飞行器。它的特点是,先由助推火箭将其送入一个预定的高度,然后自身以无动力模 式在大气层内进行滑翔。这种类型的飞行器结合了弹道导弹与巡航导弹的优点,可以实现 大气层内高超声速飞行,从而实现远距离精确打击,可以说具有强的机动能力以及良好的 突防能力。在众多衡量飞行器性能的指标参数中,最大标准飞行距离能力是评估助推-滑翔 式飞行器的一个重要指标,它被认为是该类型飞行器最为重要的战术技术指标之一。 现有的国军标GJB 6270-2008规定了潜地固体战略导弹武器系统射程评定方法, 用以评定射程是否满足战术技术指标的要求,该标准适用于一类固体弹道式导弹武器系统 的射程评定,不适用于助推-滑翔式飞行器的最大飞行距离评定。 文献“固体导弹最大射程评定方法研究”(作者:张为华,方丁酉,张育林;期刊:国 防科技参考;年份:1997;卷期:18(4);页码:45-50)提出了一种基于固体火箭发动机性能散 布分析的固体弹道式导弹最大射程评定方法,将系统辨识、性能散布分析和统计分析有机 结合,具有较强的实用性,对固体弹道式导弹试验鉴定也有一定的参考意义。 文献“助推-滑翔导弹射程管理技术研究”(作者:王晨曦,李新国;期刊:固体火箭 技术;年份:2012;卷期:35(2);页码:143-147)针对助推-滑翔导弹全程弹道设计问题,提出 了基于能量管理的射程管理技术,采用助推段能量管理机动和滑翔段阻力加速度能量管理 方法,分析了不同射程管理方案对射程的影响及其射程区间。 文献“地球自转与扁率对导弹射程偏差影响研究”(作者:冀海燕,卢文忠,杜冬菊; 期刊:青岛大学学报(工程技术版);年份:2013;卷期:28(3);页码:93-96)分析并计算了地 球自转和地球扁率对弹道式导弹射程偏差的影响,指出了考虑该偏差因素对提高导弹命中 精度的意义。 文献“高精度导弹射程精确计算方法”(作者:周立锋,马海潮;期刊:飞行器测控学 报;年份:2013;卷期:32(2);页码:173-176)针对靶场导弹射程精确计算存在的问题,提出 了利用微积分算法改进弹道式导弹射程的精确计算,采用曲线积分的方法推导了一种不同 于传统导弹射程精确计算的新方法。 综上所述,现有公开报道的文献资料主要并针对固体弹道式导弹射程评定给出了 相关标准和一些技术参考,针对助推-滑翔式导弹的射程精度提升开展了相关研究。但是, 还没有系统地形成一种针对助推-滑翔式飞行器最大标准飞行距离能力评估的方法,没有 很好地解决助推-滑翔式飞行器最大飞行距离能力难以评估的技术问题。 4 CN 111611648 A 说 明 书 2/8 页
技术实现要素:
本发明的主要目的是提供一种助推-滑翔式飞行器最大飞行距离能力评估方法, 旨在解决助推-滑翔式飞行器最大飞行距离能力难以评估的问题。 为实现上述目的,本发明提出一种基于飞行试验和地面试验数据,通过加大样本 仿真,对助推-滑翔式飞行器最大标准飞行距离能力进行评估的方法,所述方法包括以下步 骤: 步骤1,确定标准条件,所述标准条件包含状态参数、环境参数和初始参数三类; 步骤2,确定评估中的偏差因素和水平,所述偏差因素包括滑翔弹头的质量特性偏 差、气动特性偏差和大气密度偏差; 步骤3,确定评估中的约束条件,所述约束条件包含过程约束、控制变量约束和终 端约束三类; 步骤4,建立飞行器动力学模型,包括助推段飞行器六自由度动力学模型和滑翔段 弹头六自由度动力学模型; 步骤5,助推段头体分离点特征参数评估,所述特征参数包括头体分离点的高度、 速度、速度倾角、飞行距离,所述特征参数的评估样本来源包括基于飞行试验数据评估和基 于地面试验数据评估两种方式; 步骤6,滑翔段最大标准飞行距离评估,首先确定滑翔段的仿真样本数,然后根据 仿真样本产生流程生成仿真样本,最后利用大样本评估进行最大标准飞行距离估计。 所述步骤1中的状态参数包含飞行器总体参数、控制系统参数、发动机常温性能参 数、飞行器各段气动参数;所述环境参数包含地球模型参数和大气模型参数;所述初始参数 包含发射点经纬高、发射方位角、目标点高程和发动机温度。 所述步骤2中的过程约束包括总加热量约束、最大驻点热流密度约束、动压约束、 法向过载约束;所述控制变量约束包括攻角约束、倾侧角约束、攻角变化率约束、倾侧角变 化率约束、最大舵偏角约束;所述终端约束包括落速、落角和落地攻角。 所述步骤4的详细建模过程为:考虑地球模型为旋转的椭球模型,在发射系下建立 助推段飞行器六自由度动力学模型;助推段结束、头体分离后,弹头采用无动力滑翔模式, 基于典型的轨迹坐标系,建立滑翔段弹头六自由度动力学模型。 所述步骤5中基于飞行试验数据评估的流程为: S51-a:获取飞行试验数据,包括:发射点参数、目标点参数、试验弹参数、遥外测数 据、风场和气象数据; S51-b:进行轨迹复现,利用飞行试验测得的“时间-燃烧室压强”曲线,经处理后得 到“时间-推力-推进剂秒耗量-燃烧室压强”数据,将所述数据加载到步骤4中所建立的助推 段飞行器六自由度动力学模型中,复现飞行试验轨迹; S51-c:最大标准飞行距离折合,仿真模型采用步骤4所建立的助推段飞行器六自 由度动力学模型,仿真参数采用步骤1所确定的标准条件,助推段程序角改用最大标准飞行 距离时的程序角,发动机性能参数采用轨迹复现获得的推力和秒耗量,进行仿真计算获得 头体分离点特征参数,并作为助推段基于飞行试验数据评估的样本。 所述步骤5中基于地面试验数据评估的流程为: S52-a:获取地面试验数据,选取同一型号同一状态的各级发动机地面试验数据, 5 CN 111611648 A 说 明 书 3/8 页 包括:结构、材料、质量和“时间-燃烧室压强”曲线; S52-b:地面试验数据换算,根据地面试验状态发动机结构、材料、质量等于战斗弹 状态的差异进行换算,同时将I级发动机性能数据换算成海平面值,其余级发动机性能数据 换算成真空值; S52-c:最大标准飞行距离计算,仿真模型同样采用步骤4所建立的助推段飞行器 六自由度动力学模型,仿真参数采用步骤1所确定的标准条件,助推段程序角采用最大标准 飞行距离时的程序角,发动机性能参数采用地面试验换算后的参数,进行轨迹仿真计算获 得头体分离点特征参数,并作为助推段基于地面试验数据评估的样本。 所述步骤6中的仿真样本产生流程为: S62-a:根据公式 计算滑翔段仿真样本数,获得仿真试验 次数,从而确定仿真样本空间大小;式中p0为概率水平,γ为置信水平,ξ为要求达到的相对 精度,N为仿真试验样本数,Φ表示标准正态分布函数; S62-b:采用蒙特卡洛打靶法,根据步骤2的结果生成不同仿真评估偏差因素水平 组合空间; S62-c:以步骤1中确定的标准条件、步骤5中评估获得的头体分离点特征参数为起 始条件,以步骤3中确定的终端约束为终点条件,按照给定的轨迹规划程序生成最大标准飞 行距离轨迹; S62-d:依据步骤4建立的滑翔段弹头六自由度动力学模型,开展最大标准飞行距 离动力学仿真,计算最大标准飞行距离轨迹全程力热环境剖面,将每一次的计算结果Li作 为一个仿真子样,Li表示第i次仿真试验的最大飞行距离; S62-e:进行最大标准飞行距离适应性校核,判断仿真结果是否满足步骤3中规定 的过程约束条件; S62-f:若最大标准飞行距离适应性校核不通过,则舍弃该仿真子样; S62-g:若最大标准飞行距离适应性校核通过,则将仿真子样存入数据库,作为后 续评定子样。 所述步骤6中利用大样本评估进行最大标准飞行距离估计的具体方法为: 采用排序估计法,根据子样总数N和概率水平p0,按下式求得相应的总样本量M值: M=[N·(1-p0)], (4) 式中,[ ]为取整符号; 将N次仿真试验的最大标准飞行距离按下式从小到大排序: L1≤L2≤…≤LM≤…≤LN, (5) 则飞行器的最大标准飞行距离Lmax的仿真试验估计结果按下式计算: Lmax=LM。 (6) 与现有技术相比,本发明技术方案的有益效果主要体现在以下两个方面: 其一,本发明可以综合利用飞行试验数据、地面试验数据和仿真数据,因而具有较 高的可信度; 其二,本发明还可以在不开展全距离飞行试验的情况下考核助推-滑翔式飞行器 的最大飞行距离能力。 6 CN 111611648 A 说 明 书 4/8 页 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图示出的结构获得其他的附图。 图1为本发明所述能力评估方法的流程图; 图2为大气密度偏差模型; 图3为主动段基于飞行试验数据评估的结果; 图4为主动段最大飞行距离轨迹折合; 图5为最大飞行距离仿真流程图; 图6为最大飞行距离大样本仿真结果。











