
技术摘要:
本发明适用于胶囊内窥镜技术领域,提出了一种基于光学超声双模态成像的胶囊内窥镜。本发明实施例通过采用外径小于胶囊内窥镜主体的外径的同轴电缆对胶囊内窥镜主体进行机械引导和输送,使得胶囊内窥镜主体在人体内的运动可控,可以有效减少同轴电缆对人体消化道造成的 全部
背景技术:
食管癌患者的死亡率较高,究其原因,主要是食管癌的早期症状不明显,不易诊 断,病人就诊时病情往往已经很严重,治疗效果有限。目前,人体食道、胃和十二指肠等消化 道部位的病变可以通过胶囊内窥镜来诊断,胶囊内窥镜体积小巧,可以深入人体消化道内 部窥探人体肠胃和食道部位的健康状况。 然而,现有的基于光学成像技术的光学内窥镜只能观察到消化道表面的情况,无 法获取组织深层的病变信息,从而无法捕捉到位于粘膜下层的微小病变,大大限制了诊断 的完整性和准确性。
技术实现要素:
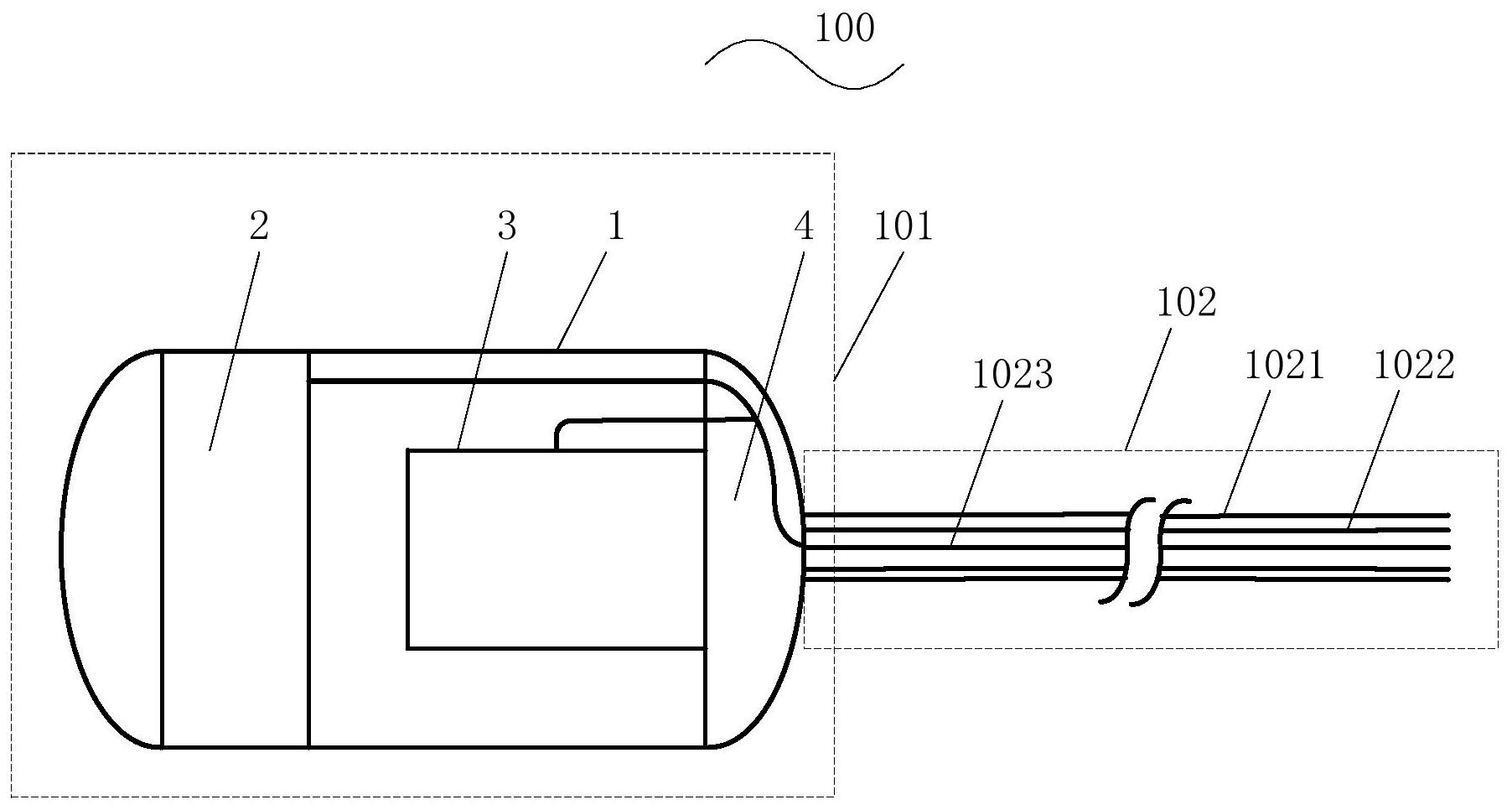
有鉴于此,本发明实施例提供了一种基于光学超声双模态成像的胶囊内窥镜,以 解决现有的基于光学成像技术的光学内窥镜只能观察到消化道表面的情况,无法获取组织 深层的病变信息,从而无法捕捉到位于粘膜下层的微小病变,大大限制了诊断的完整性和 准确性的问题。 本发明实施例提供一种基于光学超声双模态成像的胶囊内窥镜,包括胶囊内窥镜 主体和同轴电缆,所述胶囊内窥镜主体包括壳体、摄像模组和超声波成像模组; 所述胶囊内窥镜主体为胶囊形且所述胶囊内窥镜主体的外径大于所述同轴电缆 的外径; 所述摄像模组和所述超声波成像模组设置于所述壳体内部,所述同轴电缆的外绝 缘层、屏蔽层和内绝缘层与所述壳体连接,所述同轴电缆的中心导线的一端与所述摄像模 组和所述超声波成像模组电连接、另一端用于与成像系统电连接; 所述摄像模组用于在所述胶囊内窥镜主体运动至人体消化道内时,获取人体消化 道的光学图像数据并通过所述中心导线发送至所述成像系统; 所述超声波成像模组用于在所述胶囊内窥镜主体运动至人体消化道内时,获取人 体消化道的超声波扫描数据并通过所述中心导线发送至所述成像系统; 所述成像系统用于对所述光学图像数据和所述超声波扫描数据进行实时图像处 理,得到光学图像和超声图像并显示。 在一个实施例中,所述同轴电缆包括一条中心导线,所述光学图像数据和所述超 声波扫描数据通过所述中心导线分时传输至所述成像系统; 或者,所述同轴电缆包括两条中心导线,所述摄像模组和所述超声波成像模组各 通过一条中心导线与所述成像系统电连接,所述光学图像数据和所述超声波扫描数据通过 所述两条中心导线同时传输至所述成像系统。 4 CN 111568346 A 说 明 书 2/9 页 在一个实施例中,所述摄像模组包括摄像头和控制器,所述控制器与所述中心导 线电连接; 所述壳体远离所述外绝缘层、所述屏蔽层和所述内绝缘层的一端包括透光区域, 所述摄像头朝向所述透光区域设置,所述摄像头用于通过所述透光区域获取人体消化道的 光学图像; 所述控制器用于控制所述摄像头拍摄预设视野范围内的人体消化道的光学图像, 将所述光学图像转换为光学图像数据并通过所述中心导线发送至所述成像系统。 在一个实施例中,所述摄像头包括光学镜头和光源,所述光源与所述控制器电连 接; 所述光学镜头和所述光源朝向所述透光区域设置; 所述控制器还用于控制所述光源发射光线至人体消化道进行照明和补光。 在一个实施例中,所述光源包括可见光源和红外光源,所述光学图像包括可见光 图像和红外光图像。 在一个实施例中,所述超声波成像模组包括超声波换能器、信号传输器及电机; 所述超声波换能器与所述信号传输器电连接,所述超声波换能器与所述电机机械 连接,所述信号传输器和所述电机与所述中心导线电连接; 所述壳体侧壁设置有透声窗,所述超声波换能器朝向所述透声窗设置,所述超声 波换能器用于通过所述透声窗发射高频超声波对预设扫描角度内的人体消化道进行超声 波旋转扫描,以获取人体消化道的超声波扫描数据; 所述电机设置于所述壳体内部,所述电机用于驱动所述超声波换能器旋转预设扫 描角度; 所述信号传输器为可旋转式电耦合装置,用于将所述超声波扫描数据耦合到所述 中心导线,并通过所述中心导线将所述超声波扫描数据发送至所述成像系统。 在一个实施例中,所述预设扫描角度的取值范围为0°~360°,所述超声波换能器 的中心频率范围为30MHz~50MHz。 在一个实施例中,所述外绝缘层的外径范围为1mm~3mm; 所述胶囊内窥镜主体的外径范围为10mm~15mm、长度范围为20mm~50mm。 在一个实施例中,所述胶囊内窥镜还包括磁性定位部件,所述磁性定位部件设置 于所述壳体; 所述磁性定位部件用于在所述同轴电缆与所述成像系统连接时,在磁性吸引部件 的磁吸作用下带动所述胶囊内窥镜主体运动至人体消化道内。 在一个实施例中,所述摄像模组还用于在所述胶囊内窥镜主体从人体消化道匀速 移出时,获取人体消化道的多个截面的光学图像数据并通过所述中心导线发送至所述成像 系统; 所述超声波成像模组还用于在所述胶囊内窥镜主体从人体消化道匀速移出时,获 取人体消化道的多个截面的超声波扫描数据并通过所述中心导线发送至所述成像系统; 所述成像系统还用于通过三维图像重建算法对所述光学图像数据和所述超声波 扫描数据进行三维图像重建处理,得到人体消化道内的三维组织图像。 本发明实施例通过提供一种包括胶囊内窥镜主体和同轴电缆的胶囊内窥镜,在胶 5 CN 111568346 A 说 明 书 3/9 页 囊内窥镜主体的壳体内部设置摄像模组和超声波成像模组,通过采用外径小于胶囊内窥镜 主体的外径的同轴电缆对胶囊内窥镜主体进行机械引导和输送,使得胶囊内窥镜主体在人 体内的运动可控,可以有效减少同轴电缆对人体消化道造成的碰撞和摩擦,提高检查诊断 的舒适度和耐受性,还可以通过屏蔽层降低电磁辐射并消除静电;通过摄像模组获取人体 消化道的光学图像数据、通过超声波成像模组获取人体消化道的超声波扫描数据,并通过 同轴电缆将光学图像数据和超声波扫描数据发送至成像系统进行实时图像处理,得到光学 图像和超声图像并显示,可以实现光学成像和超声成像、实时呈现人体消化道内的多维度 组织成像画面,便于观察组织病变情况,可以获取组织深层的病变信息,提供更直观、更准 确的诊断依据,提高诊断的完整性和准确性。 附图说明 为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述 中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些 实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附 图获得其他的附图。 图1是本发明实施例一提供的胶囊内窥镜的第一种透视结构示意图; 图2是本发明实施例一提供的猪小肠的二维超声波图像; 图3是本发明实施例一提供的猪小肠的三维超声波图像; 图4是本发明实施例一提供的胶囊内窥镜的第二种透视结构示意图; 图5是本发明实施例二提供的胶囊内窥镜的结构示意图; 图6是本发明实施例二提供的磁性定位部件与磁性吸引部件的相对位置关系的示 意图; 图7是本发明实施例三提供的胶囊内窥镜的第一种透视结构示意图; 图8是本发明实施例三提供的胶囊内窥镜的第二种透视结构示意图。











