
技术摘要:
本发明提供了一种基于超声造影图像的图像处理方法及装置、计算机可读存储介质及电子设备。该基于超声造影图像的图像处理方法包括:对第一超声造影图像序列进行第一解耦操作,以生成第一超声造影图像序列对应的第二超声造影图像序列,其中,第一解耦操作用于提高微泡的 全部
背景技术:
超声定位显微镜(Ultrasound Localization Microscopy,ULM)主要通过对微血 管中的超声造影剂进行定位的方式实现微血管成像的目的,其能够克服声学衍射带来的影 响,重要性不言而喻。 然而,高浓度的微泡会影响微泡的定位操作,并且较深血流中的微泡易受组织运 动(比如由于心脏搏动引起的软组织运动)的干扰,因此在现有技术中,微泡的定位精准度 较差。
技术实现要素:
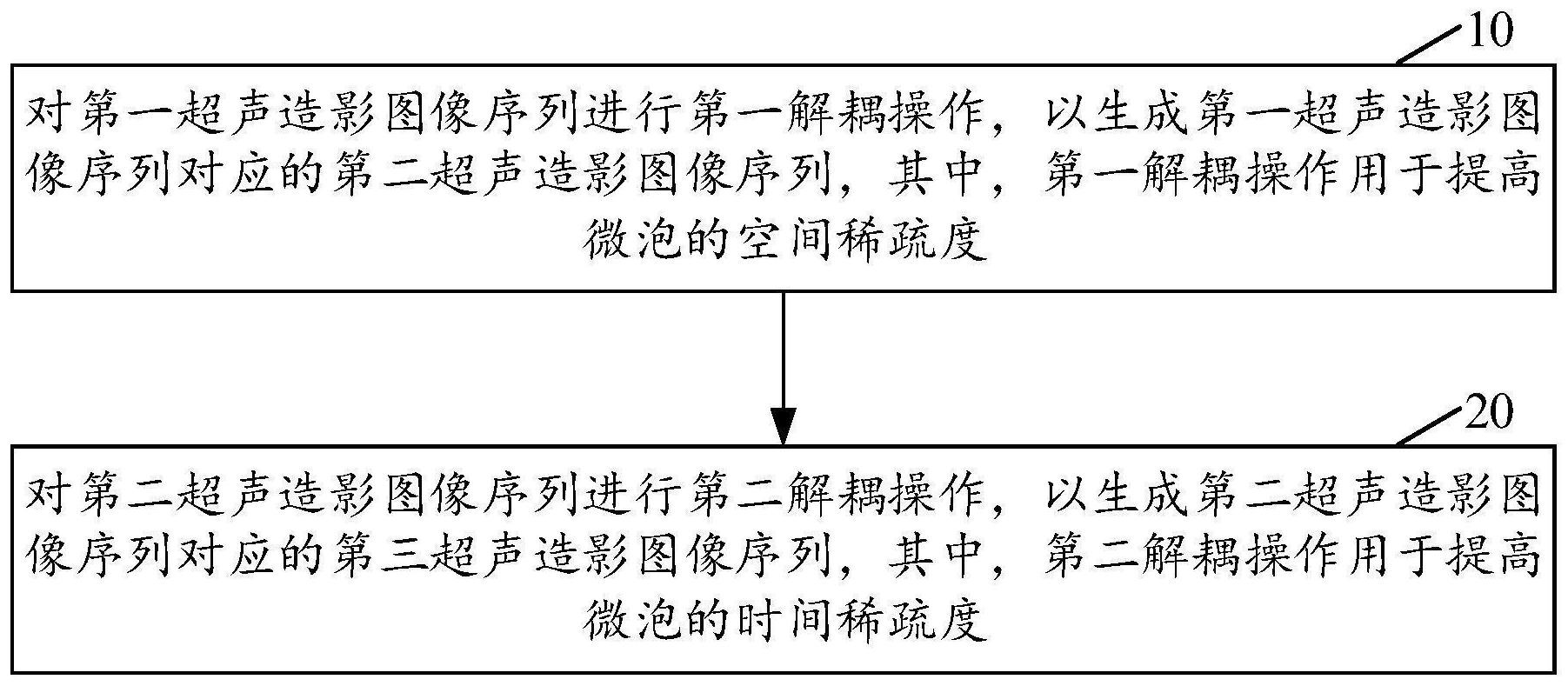
为了解决上述技术问题,提出了本发明。本发明实施例提供了一种基于超声造影 图像的图像处理方法及装置、计算机可读存储介质及电子设备。 一方面,本发明一实施例提供了一种基于超声造影图像的图像处理方法,应用于 包括微泡的第一超声造影图像序列。该基于超声造影图像的图像处理方法包括:对第一超 声造影图像序列进行第一解耦操作,以生成第一超声造影图像序列对应的第二超声造影图 像序列,其中,第一解耦操作用于提高微泡的空间稀疏度;对第二超声造影图像序列进行第 二解耦操作,以生成第二超声造影图像序列对应的第三超声造影图像序列,其中,第二解耦 操作用于提高微泡的时间稀疏度。 在本发明一实施例中,对第二超声造影图像序列进行第二解耦操作,以生成第二 超声造影图像序列对应的第三超声造影图像序列,包括:基于第二超声造影图像序列对应 的多个像素坐标和多个像素坐标各自对应的像素值集合确定多个像素坐标各自对应的一 维灰度涨落信号;基于多个像素坐标各自对应的一维灰度涨落信号生成第二超声造影图像 序列对应的第三超声造影图像序列。 在本发明一实施例中,基于多个像素坐标各自对应的一维灰度涨落信号生成第二 超声造影图像序列对应的第三超声造影图像序列,包括:对多个像素坐标各自对应的一维 灰度涨落信号进行多尺度分解操作,以生成多个像素坐标各自对应的第一多尺度分解信号 集合;针对多个像素坐标中的每个像素坐标,对像素坐标对应的第一多尺度分解信号集合 进行过滤操作,以生成像素坐标对应的第二多尺度分解信号集合,其中,过滤操作用于过滤 掉第一多尺度分解信号集合中的预设尺度的分解信号;将像素坐标对应的第二多尺度分解 信号集合进行拼接操作,以生成像素坐标对应的拼接信号;基于多个像素坐标各自对应的 拼接信号生成第二超声造影图像序列对应的第三超声造影图像序列。 在本发明一实施例中,预设尺度的分解信号包括第一多尺度分解信号集合中尺度 最小的分解信号。 4 CN 111588410 A 说 明 书 2/12 页 在本发明一实施例中,在基于第二超声造影图像序列对应的多个像素坐标和多个 像素坐标各自对应的像素值集合确定多个像素坐标各自对应的一维灰度涨落信号之前,进 一步包括:确定第二超声造影图像序列对应的空间坐标系,其中,空间坐标系能够表征图像 序列信息;基于第二超声造影图像序列和空间坐标系确定第二超声造影图像序列对应的多 个像素坐标和多个像素坐标各自对应的像素值集合。 在本发明一实施例中,基于第二超声造影图像序列对应的多个像素坐标和多个像 素坐标各自对应的像素值集合确定多个像素坐标各自对应的一维灰度涨落信号,包括:针 对多个像素坐标中的每个像素坐标,基于空间坐标系表征的图像序列信息将像素坐标对应 的像素值集合拼接为一维灰度涨落信号,以确定多个像素坐标各自对应的一维灰度涨落信 号。 在本发明一实施例中,对第一超声造影图像序列进行第一解耦操作,以生成第一 超声造影图像序列对应的第二超声造影图像序列,包括:针对第一超声造影图像序列中的 每帧超声造影图像,确定超声造影图像中的微泡区域和与微泡区域对应的背景区域之间的 距离信息;基于超声造影图像对应的距离信息对超声造影图像进行像素加权操作,以生成 超声造影图像对应的加权图像;基于第一超声造影图像序列中的超声造影图像各自对应的 加权图像生成第一超声造影图像序列对应的第二超声造影图像序列。 在本发明一实施例中,确定超声造影图像中的微泡区域和与微泡区域对应的背景 区域之间的距离信息,包括:基于微泡区域和背景区域对超声造影图像进行二值化处理,以 生成二值化图像;基于二值化图像确定微泡区域和背景区域之间的距离信息。 在本发明一实施例中,微泡区域包括多个像素块,确定超声造影图像中的微泡区 域和与微泡区域对应的背景区域之间的距离信息,包括:针对多个像素块中的每个像素块, 确定像素块到背景区域的最短距离;基于多个像素块各自对应的最短距离确定距离信息。 另一方面,本发明一实施例提供了一种基于超声造影图像的图像处理装置,应用 于包括微泡的第一超声造影图像序列。该基于超声造影图像的图像处理装置包括:第一解 耦模块,用于对第一超声造影图像序列进行第一解耦操作,以生成第一超声造影图像序列 对应的第二超声造影图像序列,其中,第一解耦操作用于提高微泡的空间稀疏度;第二解耦 模块,用于对第二超声造影图像序列进行第二解耦操作,以生成第二超声造影图像序列对 应的第三超声造影图像序列,其中,第二解耦操作用于提高微泡的时间稀疏度。 另一方面,本发明一实施例提供了一种计算机可读存储介质,该计算机可读存储 介质存储有计算机程序,该计算机程序用于执行上述任一实施例所提及的基于超声造影图 像的图像处理方法。 另一方面,本发明一实施例提供了一种电子设备,该电子设备包括:处理器和用于 存储处理器可执行指令的存储器,该处理器用于执行上述任一实施例所提及的基于超声造 影图像的图像处理方法。 本发明实施例提供的基于超声造影图像的图像处理方法,通过对第一超声造影图 像序列分别进行第一解耦操作和第二解耦操作的方式,不仅提高了超声造影图像序列的信 噪比,而且提高了微泡的时空稀疏化(包括时间稀疏化和空间稀疏化)的程度,打破了现有 微泡定位方法对微泡浓度的限制,进而为提高微泡的定位精准度提供了前提条件。此外,本 发明实施例有效解决了临床应用场景中所面临的微泡浓度和背景噪声问题,为提高后续超 5 CN 111588410 A 说 明 书 3/12 页 分辨图像重建的速度和精度提供了有利条件。 附图说明 通过结合附图对本发明实施例进行更详细的描述,本发明的上述以及其他目的、 特征和优势将变得更加明显。附图用来提供对本发明实施例的进一步理解,并且构成说明 书的一部分,与本发明实施例一起用于解释本发明,并不构成对本发明的限制。在附图中, 相同的参考标号通常代表相同部件或步骤。 图1所示为本发明实施例所适用的一场景示意图。 图2所示为本发明实施例所适用的另一场景示意图。 图3所示为本发明一示例性实施例提供的基于超声造影图像的图像处理方法的流 程示意图。 图4a和图4b所示为超声造影图像序列对应的超分辨重建示意图。 图5所示为本发明一示例性实施例提供的对第二超声造影图像序列进行第二解耦 操作,以生成第二超声造影图像序列对应的第三超声造影图像序列的流程示意图。 图6所示为本发明一示例性实施例提供的基于多个像素坐标各自对应的一维灰度 涨落信号生成第二超声造影图像序列对应的第三超声造影图像序列的流程示意图。 图7所示为本发明一示例性实施例提供的基于多个像素坐标各自对应的一维灰度 涨落信号生成第二超声造影图像序列对应的第三超声造影图像序列的阶段性结果示意图。 图8所示为本发明另一示例性实施例提供的对第二超声造影图像序列进行第二解 耦操作,以生成第二超声造影图像序列对应的第三超声造影图像序列的流程示意图。 图9所示为本发明一示例性实施例提供的对第一超声造影图像序列进行第一解耦 操作,以生成第一超声造影图像序列对应的第二超声造影图像序列的流程示意图。 图10所示为本发明一示例性实施例提供的确定超声造影图像中的微泡区域和与 微泡区域对应的背景区域之间的距离信息的流程示意图。 图11所示为本发明一示例性实施例提供的加权图像的生成过程示意图。 图12a和图12b所示为本发明一示例性实施例提供的像素加权操作的加权效果示 意图。 图13所示为本发明一示例性实施例提供的基于超声造影图像的图像处理装置的 结构示意图。 图14所示为本发明一示例性实施例提供的第二解耦模块的结构示意图。 图15所示为本发明另一示例性实施例提供的第二解耦模块的结构示意图。 图16所示为本发明一示例性实施例提供的电子设备的结构示意图。











