
技术摘要:
本发明属于陀螺结构技术领域,具体涉及一种基于正交光栅和四象限探测器的三轴陀螺结构,包括光源模块、扩束准直模块、上层光栅模块、下层陀螺模块、探测器模块,所述光源模块设置在扩束准直模块的上方,所述扩束准直模块的下方设置有上层光栅模块,所述上层光栅模块的 全部
背景技术:
微机械陀螺仪的成功生产和制造,使MEMS惯性测量单元的研制成为可能。第一个 MEMS惯性测量单元由美国的Draper实验室于1994年推出,该MEMS惯性测量单元由三个微机 械加速度计和三个微机械陀螺仪构成,每个微惯性器件均配备相应的独立集成电路。每一 个加速度计和一个陀螺仪组成一对,三对组合分别安装于立方体的三个正交平面上,构成 惯性敏感测量组合。1998年美国桑迪亚国家实验室(SNL)及BSAC将一个敏感x、y平面角速度 运动的二维微陀螺、一个敏感垂直轴向z方向角速度的一维微陀螺、三维加速度计及相应的 测试回路集成在一块芯片上,芯片边长仅为lcm。从2000年到2002年,Honeywell实验室研制 了基于MEMS技术的微型飞行管理单元BGL910,可以为飞行器提供导航、制导与控制。此后, 喷气推进实验室、MEMSSENSE、Xsens、BEL公司等众多著名研究机构和一些大学、研究中心也 纷纷加入到MEMS惯性测量单元的研究行列,经过多年发展,已经实施了多项重大的系统发 展计划,进行了多型号的试验和应用。随着工艺的不断进步,MEMS惯性测量单元的集成度越 来越高,体积逐渐减小,精度也越来越高。 分析可知目前主流的角速度单元以电容式为主,电容式测量虽然可以很好的兼容 IC电路,但是限于其下拉效应与寄生电容的影响使得电容检测方式无法做到高精度高灵敏 度;尤其在单片集成三轴时寄生电容影响因素尤为明显,因此主流三轴陀螺组件以分立集 成方式为主。
技术实现要素:
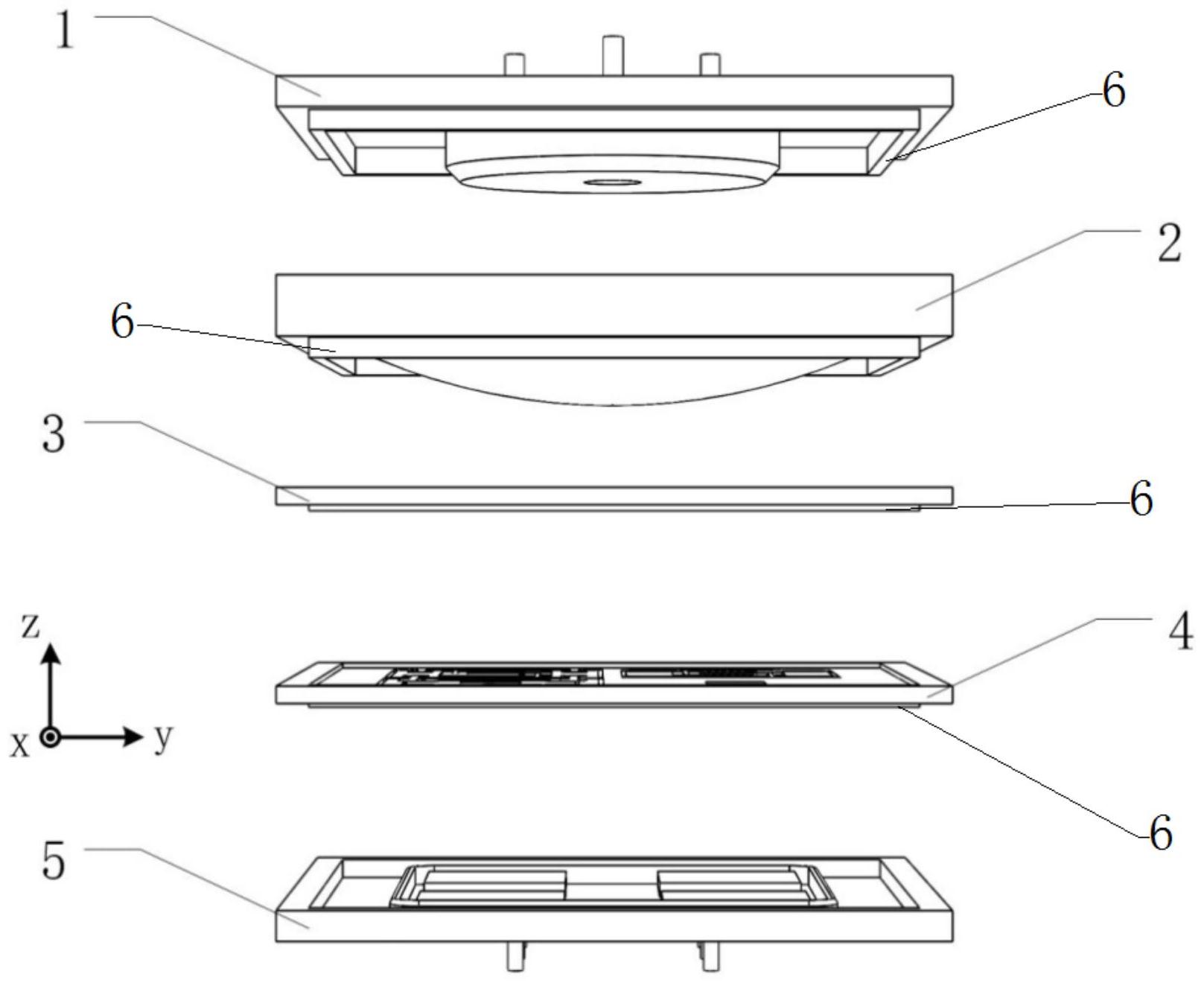
针对上述微机械陀螺仪精度低、灵敏度低的技术问题,本发明提供了一种灵敏度 高、精度高、抗干扰能力强的基于正交光栅和四象限探测器的三轴陀螺结构。 为了解决上述技术问题,本发明采用的技术方案为: 一种基于正交光栅和四象限探测器的三轴陀螺结构,包括光源模块、扩束准直模 块、上层光栅模块、下层陀螺模块、探测器模块,所述光源模块设置在扩束准直模块的上方, 所述扩束准直模块的下方设置有上层光栅模块,所述上层光栅模块的下方设置有下层陀螺 模块,所述下层陀螺模块的下方设置有探测器模块,所述上层光栅模块包括第一光栅、第二 光栅、第三光栅、挖空结构,所述第一光栅与第二光栅并列设置,所述第三光栅与挖空结构 并列设置,所述下层陀螺模块包括X轴陀螺结构、Y轴陀螺结构、Z轴陀螺结构、空位、外框,所 述X轴陀螺结构、Y轴陀螺结构并列设置在外框上,所述Z轴陀螺结构与空位并列设置在外框 上。 所述第一光栅与第二光栅的栅线方向相互垂直,所述第一光栅与第三光栅的栅线 方向一致,所述第一光栅、第二光栅、第三光栅、挖空结构分别设置在X轴陀螺结构、Y轴陀螺 4 CN 111551165 A 说 明 书 2/4 页 结构、Z轴陀螺结构、空位的正上方,所述空位与挖空结构的大小相等。 所述X轴陀螺结构包括X轴驱动质量块、第一T形梁、X轴检测质量块、L形梁,所述第 一T形梁有四个,所述X轴驱动质量块通过四个第一T形梁与外框连接,所述X轴驱动质量块 的中心处设置有X轴检测质量块,所述L形梁有四个,所述X轴检测质量块通过四个L形梁与X 轴驱动质量块连接,所述X轴检测质量块采用光栅,所述X轴检测质量块光栅与第一光栅的 栅线方向一致,所述Y轴陀螺结构与X轴陀螺结构的结构相同,所述Y轴陀螺结构与X轴陀螺 结构的方向互相垂直。 所述Z轴陀螺结构包括Z轴驱动质量块、第二T形梁、Z轴检测质量块、第三T形梁,所 述Z轴驱动质量块通过四个第二T形梁与外框连接,所述Z轴检测质量块设置在Z轴驱动质量 块的中心处,所述Z轴检测质量块通过四个第三T形梁与Z轴驱动质量块连接,所述第二T形 梁与第三T形梁的方向正交,所述Z轴检测质量块中心采用光栅,所述Z轴检测质量块光栅与 第三光栅的栅线方向一致。 所述探测器模块包括第一四象限探测器、第二四象限探测器、第三四象限探测器、 第四四象限探测器,所述第一四象限探测器、第二四象限探测器、第三四象限探测器、第四 四象限探测器分别设置在X轴陀螺结构、Y轴陀螺结构、Z轴陀螺结构、空位的正下方。 所述光源模块的波长λ为635nm。 所述光源模块、扩束准直模块、上层光栅模块、下层陀螺模块、探测器模块上均设 置有扣合结构,所述光源模块、扩束准直模块、上层光栅模块、下层陀螺模块、探测器模块通 过扣合结构依次连接。 本发明与现有技术相比,具有的有益效果是: 本发明使用双层光栅结构,增大了角速度测量的灵敏度;并且本发明实现了单片 集成微陀螺器件,减小了器件尺寸以及整体封装难度。本发明采用纳米光栅检测方式,提高 了陀螺器件的测量精度及抗电磁干扰能力。 附图说明 图1为本发明的整体结构示意图; 图2为本发明上层光栅模块的结构示意图; 图3为本发明下层陀螺模块的结构示意图; 图4为本发明探测器模块的结构示意图; 其中:1为光源模块,2为扩束准直模块,3为上层光栅模块,4为下层陀螺模块,5为 探测器模块,6为扣合结构,301为第一光栅,302为第二光栅,303为第三光栅,304为挖空结 构,401为X轴陀螺结构,402为Y轴陀螺结构,403为Z轴陀螺结构,404为空位,405为外框, 4011为X轴驱动质量块,4012为第一T形梁,4013为X轴检测质量块,4014为L形梁,4031为Z轴 驱动质量块,4032为第二T形梁,4033为Z轴检测质量块,4034为第三T形梁,501为第一四象 限探测器,502为第二四象限探测器,503为第三四象限探测器,504为第四四象限探测器。











