
技术摘要:
本发明公开了一种适用于配电房的轨道巡检机器人,包括巡检轨道、沿着巡检轨道移动的巡检设备和连接巡检设备和巡检轨道的驱动装置,巡检轨道包括两相对设置且横截面呈L形的轨道,驱动装置包括分别设置在两轨道上的主动行走轮和从动行走轮,主动行走轮和从动行走轮上分别 全部
背景技术:
配电房中的各种设备均需要进行定时的监测,以便及时的发现意外出现的问题。 目前,配电房大多数通过人工巡检来完成监测工作。然而,采用人工巡检存在检测结果不稳 定、人工成本高以及工人人身安全得不到保障等问题。 用巡检机器人代替人进行巡检,则可以避免很多人工巡检过程中的难题,且能随 时调配机器人达到指定位置,可以在未知是否有险情的情况下进行检测和巡视。轨道机器 人的出现完善了国家电网电力检测与控制的智能化和网络化。 现有技术中,巡检机器人主要由巡检轨道和巡检设备组成,由驱动装置驱动巡检 设备沿着巡检轨道行走,实现对特定位置或指定位置进行监测和检测。 现有技术中,巡检设备在巡检轨道上行走时,出现的缺点有:(1)机器人轨道弯曲 弧度不能过大,否则机构容易卡塞,可能导致驱动机构负载瞬间增大,因而无法实现直角转 弯;(2)为了能够转弯,必须加装机械和电气结构,这样就加大了机器人的结构复杂程度; (3)转弯时阻力增大,机器人就需要提供更大的驱动能力,增加了机器人的功耗。
技术实现要素:
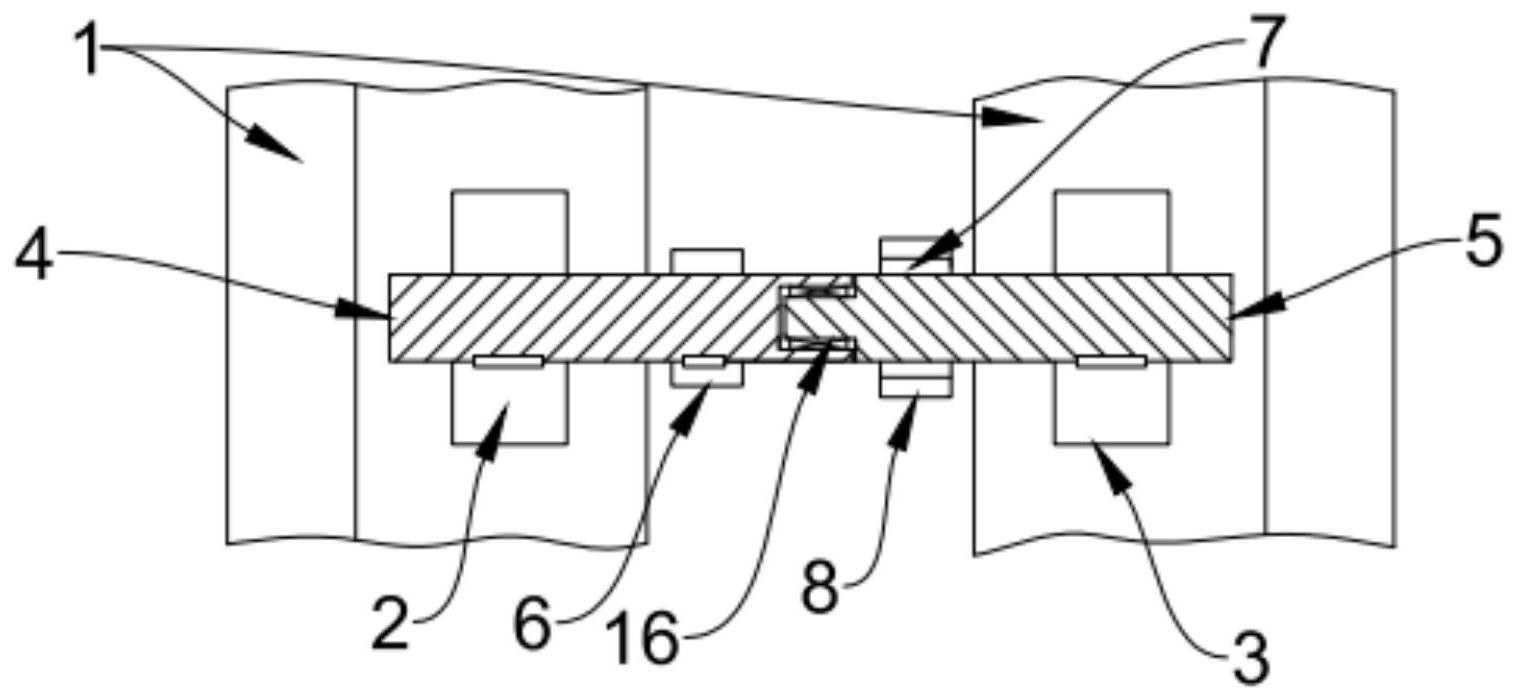
本发明的目的在于提供一种适用于配电房的轨道巡检机器人,解决现有技术中出 现的机器人行走转弯时出现卡塞的问题,保证巡检机器人顺畅转弯。 本发明技术方案一种适用于配电房的轨道巡检机器人,包括巡检轨道、沿着巡检 轨道移动的巡检设备和连接巡检设备和巡检轨道的驱动装置,所述巡检轨道包括两相对设 置且横截面呈L形的轨道,所述驱动装置包括分别设置在两所述轨道上的主动行走轮和从 动行走轮,所述主动行走轮和从动行走轮上分别连接有主动轴和从动轴,所述主动轴与从 动轴同轴设置并通过第一轴承套接连接,所述主动轴上连接有驱动机构。 优选地,所述主动轴靠近从动行走轮端设置安装孔,所述第一轴承置于安装孔内, 所述从动轴靠近主动行走轮端套接于第一轴承的内圈上。 优选地,所述主动行走轮和从动行走轮分别与主动轴和从动轴固定套接。 优选地,所述驱动机构包括固定套接在主动轴上的主动轮,所述主动轮通过传动 带连接有从动轮,所述从动轮由伺服电机驱动。 优选地,所述从动轴上套接有竖向设置的连杆,所述连杆通过第二轴承与从动轴 套接连接,所述连杆底部固定连接有置物板,所述连杆与置物板之间连接有平衡杆。 优选地,所述伺服电机置于所述置物板上。 优选地,所述主动行走轮和所从动行走轮宽度均小于所述轨道宽度,所述主动行 走轮和所述从动行走轮两侧均布与轨道侧面接触,所述轨道外侧设置有挡板。 3 CN 111546355 A 说 明 书 2/3 页 本发明技术方案的一种适用于配电房的轨道巡检机器人有益效果是: 利用单轮驱动行走,实现顺畅拐弯,避免机器人在拐弯时出现卡塞问题。 附图说明 图1为本发明技术方案的一种适用于配电房的轨道巡检机器结构示意图, 图2为图1中A-A处结构示意图, 图3为图1的俯视图。











