
技术摘要:
一种基于FPGA的声学水下信标信号处理系统,涉及声学定位和高速数字信号处理领域,包括高速AD采集模块、DDR2存储模块、FPGA模块、值班电路模块、数字脉冲信号发射模块、TVG控制模块、SD卡存储模块以及串口通信模块。本发明抗干扰能力较好、功耗较低、实时性良好。
背景技术:
在海洋资源的勘探和开发中,水声定位技术因具备稳定高精度的定位能力,是不 可或缺的导航技术之一。水声定位系统根据基线的长度可分为长基线、短基线和超短基线。 声学水下信标可应用于以上三种水声定位技术,在被测载体上安装声学水下信标,通过发 射与接收应答信号测量水下目标声源到各个阵元间的时延差确定目标的距离,从而实现水 下目标的定位与导航功能。其中水下信标信号处理机的功能和性能关系到整个系统的定位 精度、定位实时性和水下定位服务时间等指标,是水下声学导航定位系统的重要组成部分。 近年来随着嵌入式微处理器系统的发展,FPGA硬件逻辑架构因为其并行性、实时 性好的特点被广泛应用于嵌入式系统。声学水下信标系统的信号处理算法比较复杂,用 FPGA实现算法不仅具备了高速、实时的优势,数据处理速率可以提高几个量级,非常适用于 此类系统。
技术实现要素:
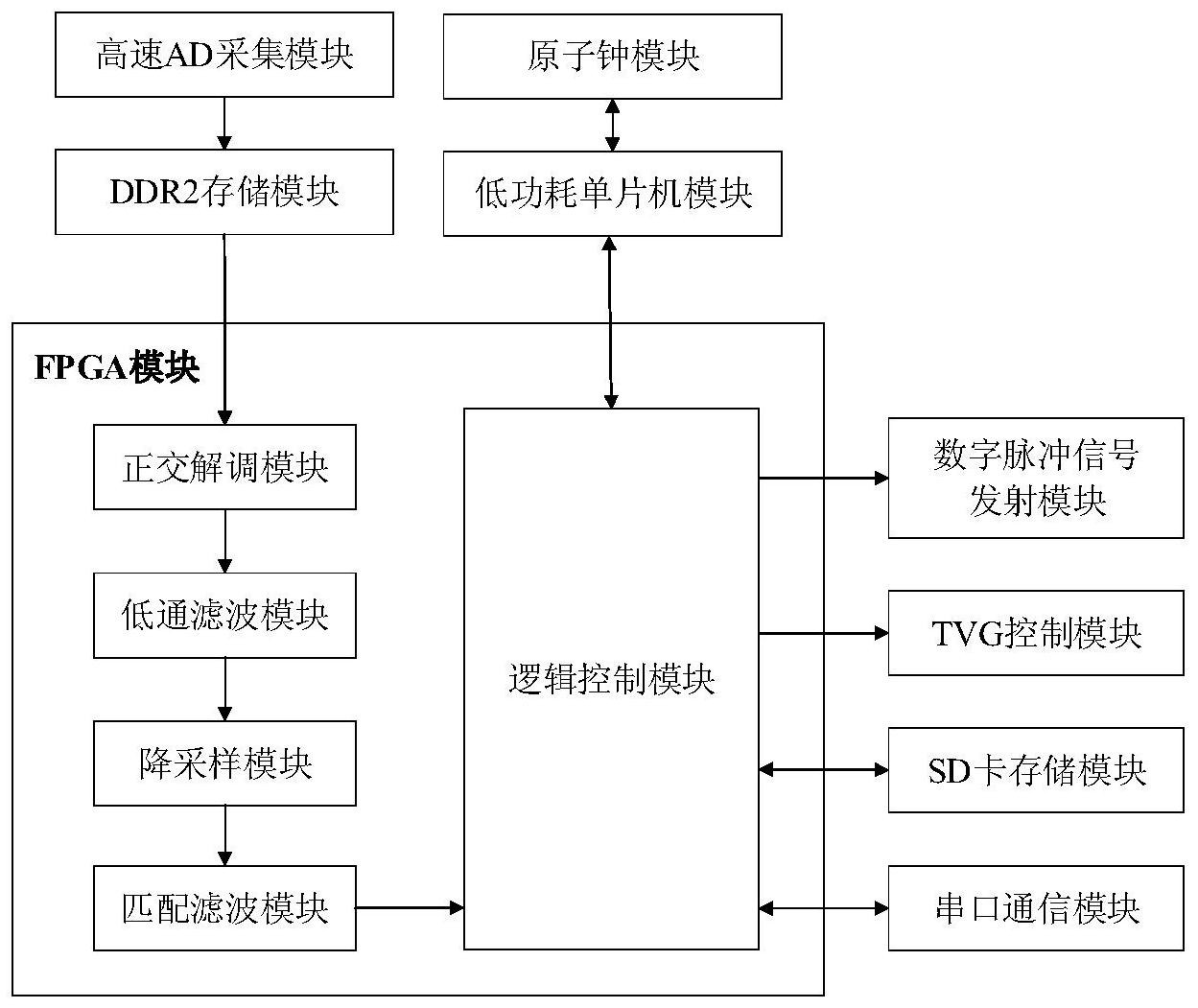
为了克服现有声学水下信标信号处理系统的抗干扰能力差、功耗高、实时性较差 等问题,本发明提供了一种抗干扰能力较好、功耗低、实时性良好的基于FPGA的声学水下信 标信号处理系统。 为了解决上述技术问题采用的技术方案为: 一种基于FPGA的声学水下信标信号处理系统,其特征在于:系统包括高速AD采集 模块、DDR2存储模块、FPGA模块、值班电路模块、数字脉冲信号发射模块、TVG控制模块、SD卡 存储模块以及串口通信模块。其中,FPGA模块包括逻辑控制模块、正交解调模块、低通滤波 模块、降采样模块、匹配滤波模块; 所述高速AD采集模块与水下信标应答器的信号调理板相连接,水声换能器接收到 的回波信号经过调理后进入高速AD采集模块做80MHz频率、16位的AD采样; 所述DDR2存储模块包括AD原始数据缓存区、滤波数据缓存区、参考信号缓存区,用 于存储高速AD采集模块产生的数字信号数据和计算的中间值; 所述FPGA模块是信号处理系统的核心,包括逻辑控制模块、正交解调模块、低通滤 波模块、降采样模块和匹配滤波模块,所述逻辑控制模块用于控制整体信号处理的流程,以 及各个模块之间的交互;所述正交解调模块用于将接收信号频谱搬移到可以解析的基带信 号,得到需要检测的信号频段;所述低通滤波模块将信号做低通滤波处理,去除无用的高频 噪声;所述降采样模块将信号数据进行降采样处理;所述匹配滤波模块将信号与参考信号 进行匹配处理; 所述原子钟模块用于精确对时,保证整个信标定位系统的时间同步。水下信标的 4 CN 111580038 A 说 明 书 2/5 页 时间同步是整个导航定位系统设计的关键,每个水下信标的时钟不仅能在下水前进行实验 室高精度对表,而且能在水下与水下活动载体近距离通过光学或无线电等方式进行对表, 确保不同水下信标的时间统一; 所述值班单片机用于定时启动FPGA以控制系统功耗。水下信标系统具备休眠和工 作两种状态,在休眠状态下水下信标只有值班单片机开展工作,其他模块均处于关机状态; 所述数字脉冲信号发射模块用于输出经过编码的脉冲信号,提供给外部发射板以 驱动换能器; 所述TVG控制模块用于输出电压信号,供外部接收调理板使用来调节输入信号的 增益; 所述SD卡存储模块通过FPGA的SD卡控制器接口与逻辑控制模块相连,用于存储参 数、回波数据和传感器参数; 所述串口通信模块用于将信号数据上传至上位机,上位机也可以通过串口通信模 块控制FPGA模块的参数。 进一步地,该声学水下信标信号处理系统主要接收和识别两类信号,一类是用于 低速水下移动目标定位的127码元的伪随机码编码信号,一类是用于高速水下移动目标定 位的单频脉冲信号。针对这两类信号有如下不同的处理方式。 进一步地,127码元的伪随机码编码信号为母船发送的休眠信号和3种不同工作模 式的启动信号,利用伪随机编码信号进行信息识别能有效提高信噪比,降低多径效应和多 址效应的影响,由于系统工作范围较远,容易出现多普勒频移,导致匹配滤波器捕获信号有 误差,因此需要对休眠信号和3种启动信号采用匹配滤波处理,将上述4种信号进行数字化, 采样频率为80kHz,形成Y1(n)、Y2(n)、Y3(n)、Y4(n)四种信号,n=1、2、…、1016,分别用解调 频率7450Hz、7460Hz、7470Hz、7480Hz、7490Hz、7500Hz、7510Hz、7520Hz、7530Hz、7540Hz、 7550Hz进行正交基带解调,并经过低通滤波和降采样和共轭处理形成Z1m(n2)、Z2m(n2)、 Z3m(n2)、Z4m(n2)共四十四个参考信号,m=1、2、…、11,n2=1、2、…、1016,这些参考信号都 保存在DDR2模块的缓存区中。 进一步地,接收的信号先要做预处理,在原子钟整10秒对接收信号进行AD采样,持 续时间为10秒,采样频率为80kHz,构成采样序列信号X(n),对序列信号X(n)进行数字正交 基带解调,解调频率为7.5kHz,构成X1(n),对X1(n)进行低通滤波和降采样,低通滤波的通 带为0~5kHz,降采样后的采样频率为20kHz,形成X2(n1)即预处理完成。 进一步地,以Z1m(n2)、Z2m(n2)、Z3m(n2)、Z4m(n2)为参考信号,对接收信号X2(n1) 进行匹配滤波处理,得到匹配结果P1m(n3)、P2m(n3)、P3m(n3)、P4m(n3),分别如下所示: 进一步地,对经过正交解调的接收信号X1(n)进行能量估计,形成能量估计函数: 5 CN 111580038 A 说 明 书 3/5 页 并构建检测信号: Y1m(n3)=P1m(n3)/X3(n3) Y2m(n3)=P2m(n3)/X3(n3) Y3m(n3)=P3m(n3)/X3(n3) Y4m(n3)=P4m(n3)/X3(n3) 当Y1m(n3)、Y2m(n3)、Y3m(n3)、Y4m(n3)存在大于阈值的时候,即表示信号进入对 应的匹配滤波器时会产生能量的极大峰值,得出接收信号的内容,并且,极大峰值出现位置 即为接收到的启动信号的第一码元的到达位置,从而确定其精确时延。 进一步地,当该声学水下信标工作在高速定位模式时,水下移动站需要快速定位, 会主动向信标发送变频信号,具体是在整10秒时刻开始,每秒发送一次固定频率信号。该信 号处理系统对接收信号进行AD采样,频率为80kHz,构成采样序列信号X(n),对X(n)序列信 号从n=1开始,依次取长度150ms的数据进行短时快速傅里叶变换分析,形成谱分析数据Y (n)=FFT(X(n)),n=1、2、…、12000,取出各对应信号的频率分量的强度。 进一步地,对10组不同频率的短时傅里叶变换谱线进行逆快速傅里叶变换,形成 滤波后的10个子带时域信号Xm(n)=IFFT(Ym(n))(m=1、2、…、10)。 进一步地,对Xm (n)进行50ms的滑动能量积分,形成10个能量积分序列 将XXm(n)的最大值与检测阈值进行比较,接收信号即 为m所对应的发射频率,并且结合该点结合采样频率进行来波到达时间估计,判断该信号初 始到达位置。 本发明的有益效果:本发明能够实时采集处理声呐信号,快速、准确的识别信号内 容实现对应工作模式,能够发射编码的数字脉冲信号并动态调节输入信号增益,能够将结 果数据和参数存储在SD卡,同时可以通过串口将数据上传到上位机显示,满足声学水下信 标计算实时性、准确性的要求。 附图说明 图1为本系统的整体结构示意框图。 图2为本系统的信号处理流程示意框图,其中,(a)接收信号为定位服务模式伪随 机码信号,(b)接收信号为高速定位模式单频脉冲信号。











