
技术摘要:
本发明提供一种机器人装置,包含头部、身体、第一板体、第二板体、第一重力感测器、第二重力感测器与处理器。第一板体设置于身体,第二板体设置于头部,第二板体枢接第一板体,且第二板体能够相对第一板体旋转。第一重力感测器设置于第一板体,并感测第一板体的第一角 全部
背景技术:
随着科技的日新月异,机器人的应用也变得越来越普及,而机器人在结构上的设 计,往往离不开对人体结构的参考。为要使机器人的活动更能模拟人体的动作,机器人的关 节除了要足够坚固强壮外,其活动的准确性也是重要的一环。 因此,在机器人的研发领域中,如何提升关节活动的准确性和可靠性,无疑是业界 发展的一个重要方向。
技术实现要素:
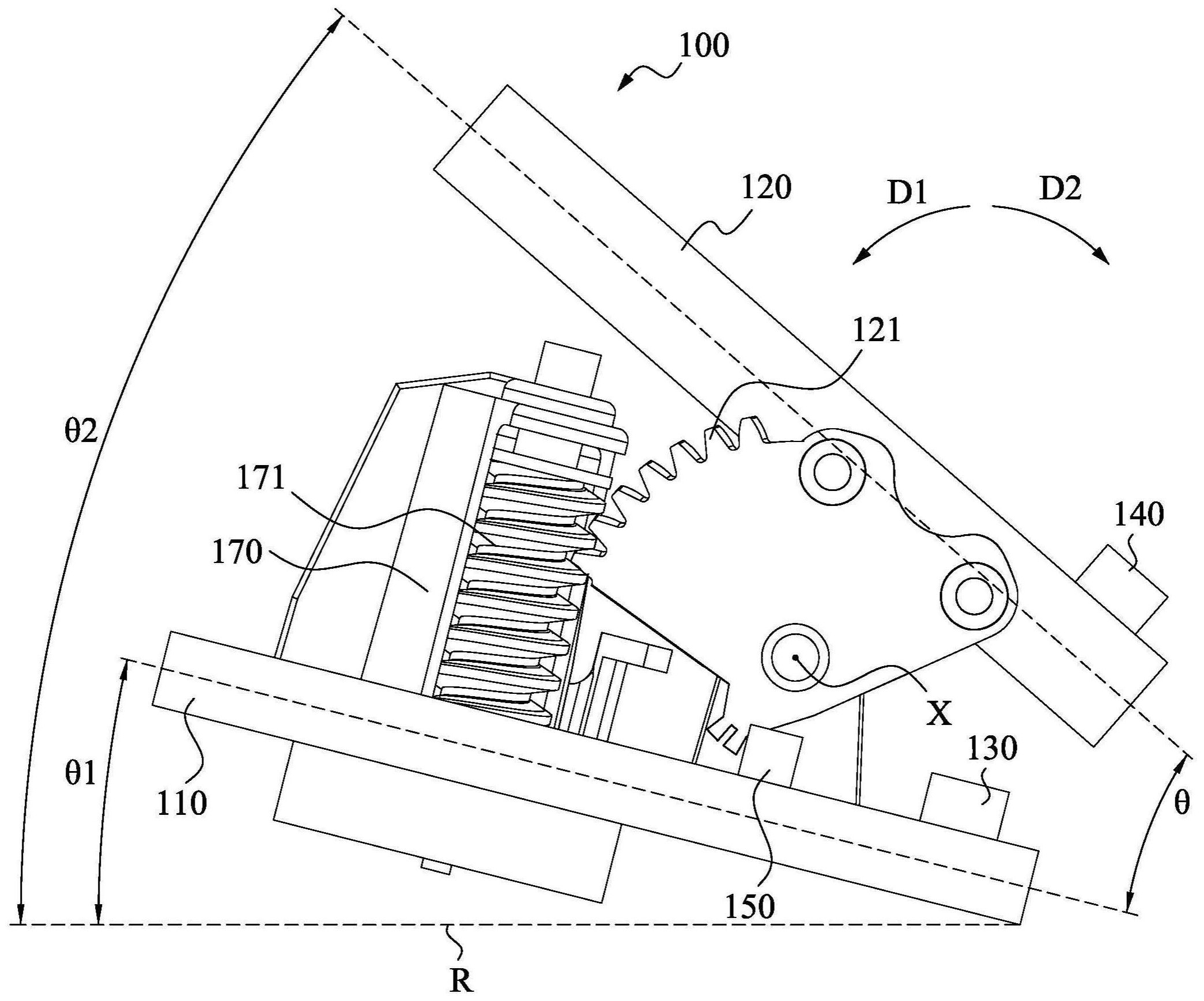
本发明的目的之一在于提供一种机器人装置,其能可靠地判断第二板体相对第一 板体旋转的角度,从而避免机器人在电子系统开机或重启时因为不当的操作而造成结构上 的破坏。 根据本发明的一实施方式,一种机器人装置包含头部、身体、第一板体、第二板体、 第一重力感测器、第二重力感测器与处理器。第一板体设置于身体,第二板体设置于头部, 第二板体枢接第一板体,且第二板体能够相对第一板体旋转。第一重力感测器设置于第一 板体,并配置以感测第一板体的第一角度。第二重力感测器设置于第二板体,并配置以感测 第二板体的第二角度。处理器电性连接第一重力感测器与第二重力感测器,并配置以根据 所感测的第一角度与所感测的第二角度的相差值变化判断第二板体相对第一板体旋转的 方向。 在本发明一或多个实施方式中,上述的第一板体相对水平参考面的角度定义第一 角度,第二板体相对水平参考面的角度定义第二角度。 在本发明一或多个实施方式中,机器人装置进一步包含光遮断器,其电性连接处 理器,并且包含接收器、发射器以及遮光部。接收器设置于第一板体。发射器设置于第一板 体,并远离接收器,发射器配置以向接收器发射光线。遮光部设置于第二板体,并配置以随 着第二板体相对第一板体旋转而至少部分经过于发射器与接收器之间。处理器配置以根据 接收器是否接收到光线,以及第二板体相对第一板体旋转的方向,而判断第二板体相对于 第一板体的角度的范围。 在本发明一或多个实施方式中,当上述的接收器接收到光线时,接收器向处理器 传送第一信号,当接收器停止接收到光线时,接收器向处理器传送第二信号。 在本发明一或多个实施方式中,上述的遮光部具有第一子遮光部以及第二子遮光 部,第一子遮光部与第二子遮光部配置以交替地经过于发射器与接收器之间,第一子遮光 部与第二子遮光部之间具有通光部,通光部配置以让光线穿越。遮光部还具有中心线,其对 称地划分通光部。 在本发明一或多个实施方式中,当上述的第二板体相对第一板体的角度小于第二 4 CN 111546362 A 说 明 书 2/7 页 子遮光部朝向第一子遮光部的表面与中心线之间的夹角时,光线穿越通光部。 在本发明一或多个实施方式中,第一子遮光部与第二子遮光部各自具有朝向与背 对通光部的两表面。第一子遮光部的两表面与中心线之间的两夹角定义第一范围,而第二 子遮光部的两表面与中心线之间的两夹角定义第二范围。当接收器未接收到光线时,若处 理器判断第二板体相对第一板体的方向为第一方向,则第二板体相对第一板体的角度在第 一范围内,若处理器判断第二板体相对第一板体旋转的方向为相反于第一方向的第二方 向,则第二板体相对第一板体的角度在第二范围内。 在本发明一或多个实施方式中,当上述的第二板体相对第一板体的角度大于第二 子遮光部背对第一子遮光部的表面与中心线之间的夹角时,接收器接收到光线。 在本发明一或多个实施方式中,上述的机器人装置还包含移动装置。此移动装置 电性连接处理器,并设置于第一板体,移动装置配置以受处理器控制,以相对第一板体旋转 第二板体。 本发明上述实施方式至少具有以下优点: (1)由于第二板体绕轴线相对第一板体旋转的信号,是通过第一重力感测器、第二 重力感测器以及光遮断器的同时运作而获得,因此,处理器所判断第二板体绕轴线相对第 一板体旋转的角度具有相当高的可靠度,还可避免机器人在电子系统开机或重启时因为不 当的操作而造成结构上的破坏。 (2)机器人装置能够简单容易地掌握第二板体绕轴线相对第一板体旋转的角度, 以便机器人装置进行校正。 (3)由于第一重力感测器与第二重力感测器容易安装,且体积细小,因而有利于维 持机器人装置的结构紧密性,更有利于控制机器人装置的制作成本。 (4)由于第二板体绕轴线相对第一板体旋转的角度并非判断于移动装置的作动行 程,因此,第二板体绕轴线相对第一板体旋转的角度的掌握,不会因为移动装置在操作时出 现掉步的情况而有所影响。 附图说明 图1为绘示依照本发明一实施方式的机器人装置的立体示意图。 图2为绘示图1的机器人装置的正面示意图。 图3为绘示图1的机器人装置的应用示意图,其中第二板体的第二角度大于第一板 体的第一角度。 图4为绘示图1的机器人装置的应用示意图,其中第二板体的第二角度小于第一板 体的第一角度。 图5为绘示图1的光遮断器的侧面放大示意图。 图6为绘示图1的机器人装置的电性连接示意图。 图7为绘示图5沿线段M-M的切面示意图。 附图标记说明如下: 100:机器人装置 110:第一板体 120:第二板体 5 CN 111546362 A 说 明 书 3/7 页 121:齿轮 130:第一重力感测器 140:第二重力感测器 150:光遮断器 151:接收器 152:发射器 153:遮光部 153a:第一子遮光部 153a1、153a2:表面 153b:第二子遮光部 153b1、153b2:表面 153c:通光部 160:处理器 170:移动装置 171:蜗轮 R:水平参考面 θ:角度 θ1:第一角度 θ2:第二角度 θa、θb、θc:范围 CL:中心线 D1:第一方向 D2:第二方向 M-M:线段 S:空间 X:轴线











