
技术摘要:
本发明提供一种定位系统和定位方法。本发明实施方式的定位系统包括一个或多个处理器,处理器被配置用于获取当前场景所采集的环视数据,根据定位算法处理采集的环视数据以生成虚拟地图;获取当前场景的当前环视数据,根据定位算法处理当前环视数据及虚拟地图以得到当前 全部
背景技术:
目前,一般使用高精度惯导系统或者依赖高精度地图提供商提供高精度地图实现 高精度定位,高精度惯导系统的维持时间短且成本较高,而高精度地图的维持时间虽然长 但成本依旧很高。
技术实现要素:
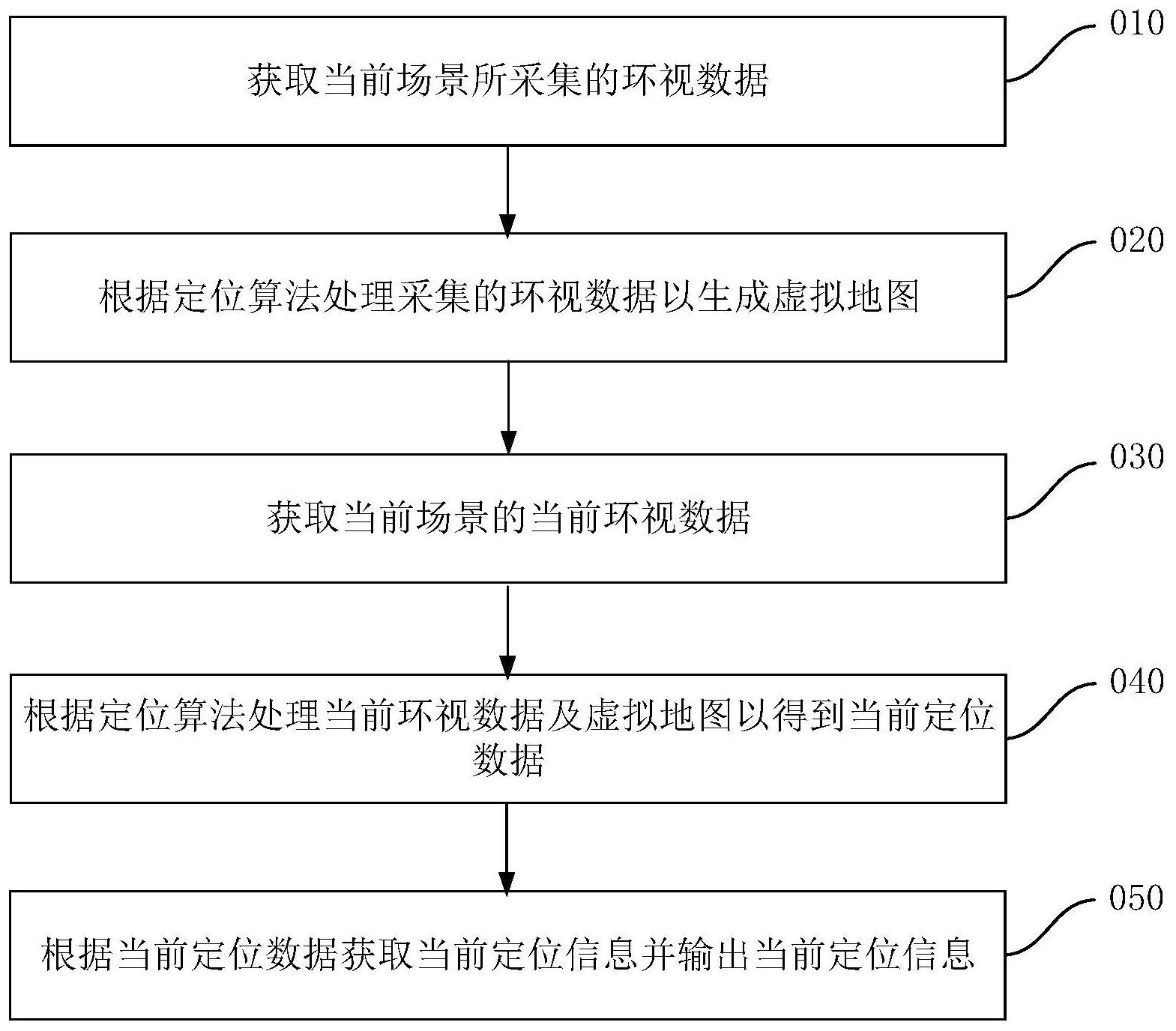
本发明的实施例提供了一种定位系统、定位方法和非易失性计算机可读存储介 质。 本发明实施方式的定位系统包括一个或多个处理器,所述处理器被配置用于获取 当前场景所采集的环视数据,根据定位算法处理所述采集的环视数据以生成虚拟地图;获 取当前场景的当前环视数据,根据定位算法处理所述当前环视数据及所述虚拟地图以得到 当前定位数据,及根据所述当前定位数据获取当前定位信息并输出所述当前定位信息。 本发明实施方式的定位系统通过当前场景所采集的环视数据建立虚拟地图,然后 根据定位算法处理当前环视数据和虚拟地图以得到当前定位数据,然后根据当前定位数据 得到当前定位信息并输出,无需依赖高精度地图提供商即可对当前场景主动建立高精度的 虚拟地图,只需建立一次虚拟地图即可在当前场景永久实现定位,维持时间长,且使用所采 集的环视数据实现定位,具有降低环境因素对定位的影响,提高定位精度,成本较低的优 点。 在某些实施方式中,所述定位系统还包括图像获取装置和传感器,所述定位系统 应用于载体,所述图像获取装置用于采集当前场景的环视图像,所述传感器用于采集所述 载体的运动数据;所述采集的环视数据包括采集的位置特征数据和采集的所述载体的运动 数据,所述定位算法包括深度学习算法和位置识别算法,所述虚拟地图包括与所述位置识 别算法对应的特征地图;所述处理器还用于获取当前场景所采集的环视图像和所述运动数 据,根据基于所述深度学习算法的神经网络模型提取所述环视图像中的所述位置特征数 据,根据所述位置识别算法处理所述位置特征数据和所述运动数据以生成所述特征地图。 定位系统通过神经网络模型提取采集的位置特征数据,提取精度较高,并通过位 置识别算法处理位置特征数据和运动数据以生成特征地图,从而获取高精度的特征地图, 且用户可通过定位系统对所需要的场景建立对应的特征地图,对不同场景的鲁棒性较好。 在某些实施方式中,所述当前环视数据包括当前位置特征数据,所述处理器还用 于获取当前场景的所述当前环视图像,通过所述神经网络模型提取所述当前环视图像中的 所述当前位置特征数据,根据所述位置识别算法匹配所述当前位置特征数据与所述特征地 图以得到所述当前定位数据。 7 CN 111583335 A 说 明 书 2/17 页 特征地图是基于当前场景的不同位置的位置特征数据和运动数据构建而成,匹配 较为精准,可提高定位精度。 在某些实施方式中,所述定位系统还包括图像获取装置,所述图像获取装置还用 于采集当前场景的环视图像;所述采集的环视数据包括点云特征数据,所述定位算法包括 点云地图定位算法,所述虚拟地图包括与所述点云地图定位算法对应的点云地图;所述处 理器还用于获取当前场景所采集的环视图像,提取所述环视图像中的所述点云特征数据, 根据所述点云地图定位算法处理所述点云特征数据以生成所述点云地图。 定位系统通过点云地图定位算法处理点云特征数据以生成点云地图,可获取高精 度的点云地图,且用户可通过定位系统对所需要的场景建立对应的点云地图,对不同场景 的鲁棒性较好。 在某些实施方式中,所述当前环视数据包括当前点云特征数据,所述处理器还用 于获取当前场景的当前环视图像、提取所述当前环视图像中的所述当前点云特征数据,根 据所述点云地图定位算法匹配所述当前点云特征数据与所述点云地图以得到所述当前定 位数据。 点云地图是基于当前场景的不同位置的点云特征数据构建而成,匹配较为精准, 可提高定位精度。 在某些实施方式中,所述定位系统还包括图像获取装置,所述图像获取装置还用 于采集当前场景的环视图像;所述采集的环视数据包括采集的语义特征数据,所述定位算 法包括语义地图定位算法,所述虚拟地图包括与所述语义地图定位算法对应的语义地图; 所述处理器还用于获取当前场景所采集的环视图像,提取所述环视图像中的所述语义特征 数据,根据所述语义地图定位算法处理所述语义特征数据以生成语义地图。 定位系统通过语义地图定位算法处理语义特征数据以生成语义地图,可获取高精 度的语义地图,且用户可通过定位系统对所需要的场景建立对应的语义地图,对不同场景 的鲁棒性较好。 在某些实施方式中,所述处理器还用于根据所述语义地图定位算法识别所述语义 特征数据中的障碍物信息,根据所述障碍物信息生成所述语义地图。 语义地图定位算法可识别障碍物,从而可排除障碍物对定位的影响,提升定位精 度。 在某些实施方式中,所述当前环视数据包括当前语义特征数据,所述处理器还用 于获取当前场景的当前环视图像,提取所述当前环视图像中的所述当前语义特征数据,根 据所述语义地图定位算法匹配所述当前语义特征数据与所述语义地图以得到所述当前定 位数据。 语义地图是基于当前场景的不同位置的语义特征数据构建而成,匹配较为精准, 可提高定位精度。 在某些实施方式中,所述定位系统还包括图像获取装置和传感器,所述定位系统 还包括图像获取装置和传感器,所述定位系统应用于载体,所述图像获取装置用于采集当 前场景的环视图像,所述传感器用于采集所述载体的运动数据;所述采集的环视数据包括 位置特征数据、点云特征数据、语义特征数据、和所述载体的运动数据,所述定位算法包括 位置识别算法、点云地图定位算法和语义地图定位算法,所述虚拟地图包括与所述位置识 8 CN 111583335 A 说 明 书 3/17 页 别算法对应的特征地图、与所述点云地图定位算法对应的点云地图、和与所述语义地图定 位算法对应的语义地图;所述处理器还用于获取当前场景所采集的环视图像和所述运动数 据,提取所述环视图像中的所述位置特征数据、所述点云特征数据和所述语义特征数据,根 据所述位置识别算法处理所述位置特征数据和所述运动数据以生成所述特征地图,根据所 述点云地图定位算法处理所述点云特征数据以生成所述点云地图,根据所述语义地图定位 算法处理所述语义特征数据以生成所述语义地图。 定位系统通过位置识别算法、点云地图定位算法和语义地图定位算法分别生成特 征地图、点云地图和语义地图,通过多种算法建立多个虚拟地图,为后续定位提供冗余,可 适应不同的定位环境,提高了定位系统的鲁棒性和安全性。 在某些实施方式中,所述当前环视数据包括当前位置特征数据、当前点云特征数 据和当前语义特征数据,所述处理器还用于获取当前场景的当前环视图像,提取所述当前 环视图像中的所述当前位置特征数据、所述当前点云特征数据和所述当前语义特征数据, 根据所述位置识别算法匹配所述当前位置特征数据与所述特征地图以得到第一定位数据, 根据所述点云地图定位算法匹配所述当前点云特征数据与所述点云地图以得到第二定位 数据,根据所述语义地图定位算法匹配所述当前语义特征数据与所述语义地图以得到第三 定位数据,根据融合滤波算法处理所述第一定位数据、所述第二定位数据和所述第三定位 数据以获取所述当前定位信息,输出所述当前定位信息。 融合滤波算法可对多个定位数据实现自动适配,相互校正排除干扰,去除异常的 信息,从而实现高精度定位。 在某些实施方式中,所述处理器还用于选择工作模式;及当所述工作模式为预处 理模式时,获取当前场景所采集的环视数据。 用户可通过预处理模式建立指定场景的虚拟地图,鲁棒性强,且无需依赖高精度 地图供应商提供高精度的虚拟地图,可节省成本。 在某些实施方式中,所述处理器还用于选择工作模式;及当所述工作模式为定位 模式时,获取当前场景的当前环视数据。 用户手动选择工作模式或定位系统自动判断当前场景是否存在对应的虚拟地图 以快速进入定位模式,而无需重新建立虚拟地图,提高定位效率。 本发明实施的定位方法包括获取当前场景所采集的环视数据;根据定位算法处理 所述采集的环视数据以生成虚拟地图;获取当前场景的当前环视数据;根据定位算法处理 所述当前环视数据及所述虚拟地图以得到当前定位数据;及根据所述当前定位数据获取当 前定位信息并输出所述当前定位信息。 本发明实施方式的定位方法通过当前场景所采集的环视数据建立虚拟地图,然后 根据定位算法处理当前环视数据和虚拟地图以得到当前定位数据,然后根据当前定位数据 得到当前定位信息并输出,无需依赖高精度地图提供商即可对当前场景主动建立高精度的 虚拟地图,只需建立一次虚拟地图即可在当前场景永久实现定位,维持时间长,且使用所采 集的环视数据实现定位,具有降低环境因素对定位的影响,提高定位精度,成本较低的优 点。 在某些实施方式中,所述采集的环视数据包括采集的位置特征数据和采集的载体 的运动数据,所述定位算法包括深度学习算法和位置识别算法,所述虚拟地图包括与所述 9 CN 111583335 A 说 明 书 4/17 页 位置识别算法对应的特征地图;所述获取当前场景所采集的环视数据,包括:获取当前场景 所采集的环视图像和所述运动数据;根据基于所述深度学习算法的神经网络模型提取所述 环视图像中的所述位置特征数据;所述根据定位算法处理所述环视数据以生成虚拟地图, 包括:根据所述位置识别算法处理所述位置特征数据和所述运动数据以生成所述特征地 图。 定位系统通过基于深度学习算法的神经网络模型提取位置特征数据,提取精度较 高,并通过位置识别算法处理位置特征数据和运动数据以生成特征地图,从而获取高精度 的特征地图,且用户可通过定位系统对所需要的场景建立对应的特征地图,对不同场景的 鲁棒性较好。 在某些实施方式中,所述当前环视数据包括当前位置特征数据,所述获取当前场 景的当前环视数据,包括:获取当前场景的当前环视图像;通过所述神经网络模型提取所述 当前环视图像中的所述当前位置特征数据;所述根据定位算法处理所述当前环视数据及所 述虚拟地图以得到当前定位数据,包括:根据所述位置识别算法匹配所述当前位置特征数 据与所述特征地图以得到所述当前定位数据。 特征地图是基于当前场景的不同位置的位置特征数据和运动数据构建而成,匹配 较为精准,可提高定位精度。 在某些实施方式中,所述采集的环视数据包括采集的点云特征数据,所述定位算 法包括点云地图定位算法,所述虚拟地图包括与所述点云地图定位算法对应的点云地图; 所述获取当前场景所采集的环视数据,包括:获取当前场景所采集的环视图像;提取所述环 视图像中的所述点云特征数据;所述根据定位算法处理所述采集的环视数据以生成虚拟地 图,包括:根据所述点云地图定位算法处理所述点云特征数据以生成所述点云地图。 定位系统通过点云地图定位算法处理点云特征数据以生成点云地图,可获取高精 度的点云地图,且用户可通过定位系统对所需要的场景建立对应的点云地图,对不同场景 的鲁棒性较好。 在某些实施方式中,所述当前环视数据包括当前点云特征数据,所述获取当前场 景的当前环视数据,包括:获取当前场景的当前环视图像;提取所述当前环视图像中的所述 当前点云特征数据;所述根据定位算法处理所述当前环视数据及所述虚拟地图以得到当前 定位数据,包括:根据所述点云地图定位算法匹配所述当前点云特征数据与所述点云地图 以得到所述当前定位数据。 点云地图是基于当前场景的不同位置的点云特征数据构建而成,匹配较为精准, 可提高定位精度。 在某些实施方式中,所述采集的环视数据包括采集的语义特征数据,所述定位算 法包括语义地图定位算法,所述虚拟地图包括与所述语义地图定位算法对应的语义地图; 所述获取当前场景所采集的环视数据,包括:获取当前场景所采集的环视图像;提取所述环 视图像中的所述语义特征数据;所述根据定位算法处理所述采集的环视数据以生成虚拟地 图,包括:根据所述语义地图定位算法处理所述语义特征数据以生成语义地图。 定位系统通过语义地图定位算法处理语义特征数据以生成语义地图,可获取高精 度的语义地图,且用户可通过定位系统对所需要的场景建立对应的语义地图,对不同场景 的鲁棒性较好。 10 CN 111583335 A 说 明 书 5/17 页 在某些实施方式中,所述根据所述语义地图定位算法处理所述语义特征数据以生 成语义地图,包括:根据所述语义地图定位算法识别所述语义特征数据中的障碍物信息,根 据所述障碍物信息生成所述语义地图。 语义地图定位算法可识别障碍物,从而可排除障碍物对定位的影响,提升定位精 度。 在某些实施方式中,所述当前环视数据包括当前语义特征数据,所述获取当前场 景的当前环视数据,包括:获取当前场景的当前环视图像;提取所述当前环视图像中的所述 当前语义特征数据;所述根据定位算法处理所述当前环视数据及所述虚拟地图以得到当前 定位数据,包括:根据所述语义地图定位算法匹配所述当前语义特征数据与所述语义地图 以得到所述当前定位数据。 语义地图是基于当前场景的不同位置的语义特征数据构建而成,匹配较为精准, 可提高定位精度。 在某些实施方式中,所述采集的环视数据包括采集的位置特征数据、采集的点云 特征数据、采集的语义特征数据、和采集的载体的运动数据,所述定位算法包括深度学习算 法、位置识别算法、点云地图定位算法和语义地图定位算法,所述虚拟地图包括与所述位置 识别算法对应的特征地图、与所述点云地图定位算法对应的点云地图、和与所述语义地图 定位算法对应的语义地图;所述获取当前场景所采集的环视数据,包括:获取当前场景所采 集的环视图像和所述运动数据;提取所述环视图像中的所述位置特征数据、所述点云特征 数据和所述语义特征数据;所述根据定位算法处理所述采集的环视数据以生成虚拟地图, 包括:根据所述位置识别算法处理所述位置特征数据和所述运动数据以生成所述特征地 图;根据所述点云地图定位算法处理所述点云特征数据以生成所述点云地图;根据所述语 义地图定位算法处理所述语义特征数据以生成所述语义地图。 定位系统通过位置识别算法、点云地图定位算法和语义地图定位算法分别生成特 征地图、点云地图和语义地图,通过多种算法建立多个虚拟地图,为后续定位提供冗余,可 适应不同的定位环境,提高了定位系统的鲁棒性和安全性。 在某些实施方式中,所述当前环视数据包括当前位置特征数据、当前点云特征数 据和当前语义特征数据,所述获取当前场景的当前环视数据,包括:获取当前场景的当前环 视图像; 提取所述当前环视图像中的所述当前位置特征数据、所述当前点云特征数据和所 述当前语义特征数据;所述根据定位算法处理所述当前环视数据及所述虚拟地图以得到当 前定位数据,包括:根据所述位置识别算法匹配所述当前位置特征数据与所述特征地图以 得到第一定位数据;根据所述点云地图定位算法匹配所述当前点云特征数据与所述点云地 图以得到第二定位数据;根据所述语义地图定位算法匹配所述当前语义特征数据与所述语 义地图以得到第三定位数据;所述根据所述当前定位数据获取当前定位信息并输出所述当 前定位信息,包括:根据融合滤波算法处理所述第一定位数据、所述第二定位数据和所述第 三定位数据以获取所述当前定位信息;及输出所述当前定位信息。 融合滤波算法可对多个定位数据实现自动适配,相互校正排除干扰,去除异常的 信息,从而实现高精度定位。 在某些实施方式中,所述定位方法还包括:选择工作模式;及当所述工作模式为预 11 CN 111583335 A 说 明 书 6/17 页 处理模式时,进入所述获取当前场景所采集的环视数据的步骤。 用户可通过预处理模式建立指定场景的虚拟地图,鲁棒性强,且无需依赖高精度 地图供应商提供高精度的虚拟地图,可节省成本。 在某些实施方式中,所述定位方法还包括:选择工作模式;及当所述工作模式为定 位模式时,进入所述获取当前场景的当前环视数据的步骤。 用户手动选择工作模式或定位系统自动判断当前场景是否存在对应的虚拟地图 以快速进入定位模式,而无需重新建立虚拟地图,提高定位效率。 本发明实施方式的一个或多个包含计算机可执行指令的非易失性计算机可读存 储介质,当所述计算机可读存储介质中存储的所述计算机可执行指令被一个或多个处理器 执行时,使得所述处理器执行上述任一实施方式所述的定位方法。 本发明实施方式的定位系统、定位方法和非易失性计算机可读存储介质通过当前 场景所采集的环视数据建立虚拟地图,然后根据定位算法处理当前环视数据和虚拟地图以 得到当前定位数据,然后根据当前定位数据得到当前定位信息并输出,无需依赖高精度地 图提供商即可对当前场景主动建立高精度的虚拟地图,只需建立一次虚拟地图即可在当前 场景永久实现定位,维持时间长,且使用所采集的环视数据实现定位,具有降低环境因素对 定位的影响,提高定位精度,成本较低的优点。 本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变 得明显,或通过本发明的实践了解到。 附图说明 为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。 图1是本发明某些实施方式的定位方法的流程示意图; 图2是本发明某些实施方式的定位系统模块示意图; 图3是本发明某些实施方式的载体的结构示意图; 图4是本发明某些实施方式的定位方法的流程示意图; 图5和图6是本发明某些实施方式的定位方法的场景示意图; 图7至图11是本发明某些实施方式的定位方法的流程示意图。 图12是本发明某些实施方式的计算机可读存储介质与处理器的连接示意图。











