
技术摘要:
本公开提供了“用于车辆内部评估和情境服务的方法和设备”。一种车辆可以被配置为使用车辆传感器来检测在所述车辆的内部的物品。所述车辆还可以基于确定的物品价值而确定是否应当移取所述物品,诸如所述物品价值可以通过将物品特性与物品数据库进行比较来确定。而且, 全部
背景技术:
自主车辆可以以车辆即服务模型操作,车辆即服务模型可以体现以按需方式订购 和使用的车队。就像出租车或共乘车辆一样,乘员可能会在车舱内遗落物品,或者简单地说 通常留下污物(例如,食物、洒落的饮料等)。然而,与人类驾驶的出租车和共乘服务不同,在 自主模型中没有驾驶员。因此,当物品被遗落或饮料被洒落时,没有人会注意到。 鉴于车辆每天可能为数十名(如果没有数百名的话)乘员服务,在每一车辆中洒落 和遗落物品的机会很大。这在污物的情况下可能会惹恼其他乘客,并且在遗落物品的情况 下可能会永久地丢失物件。
技术实现要素:
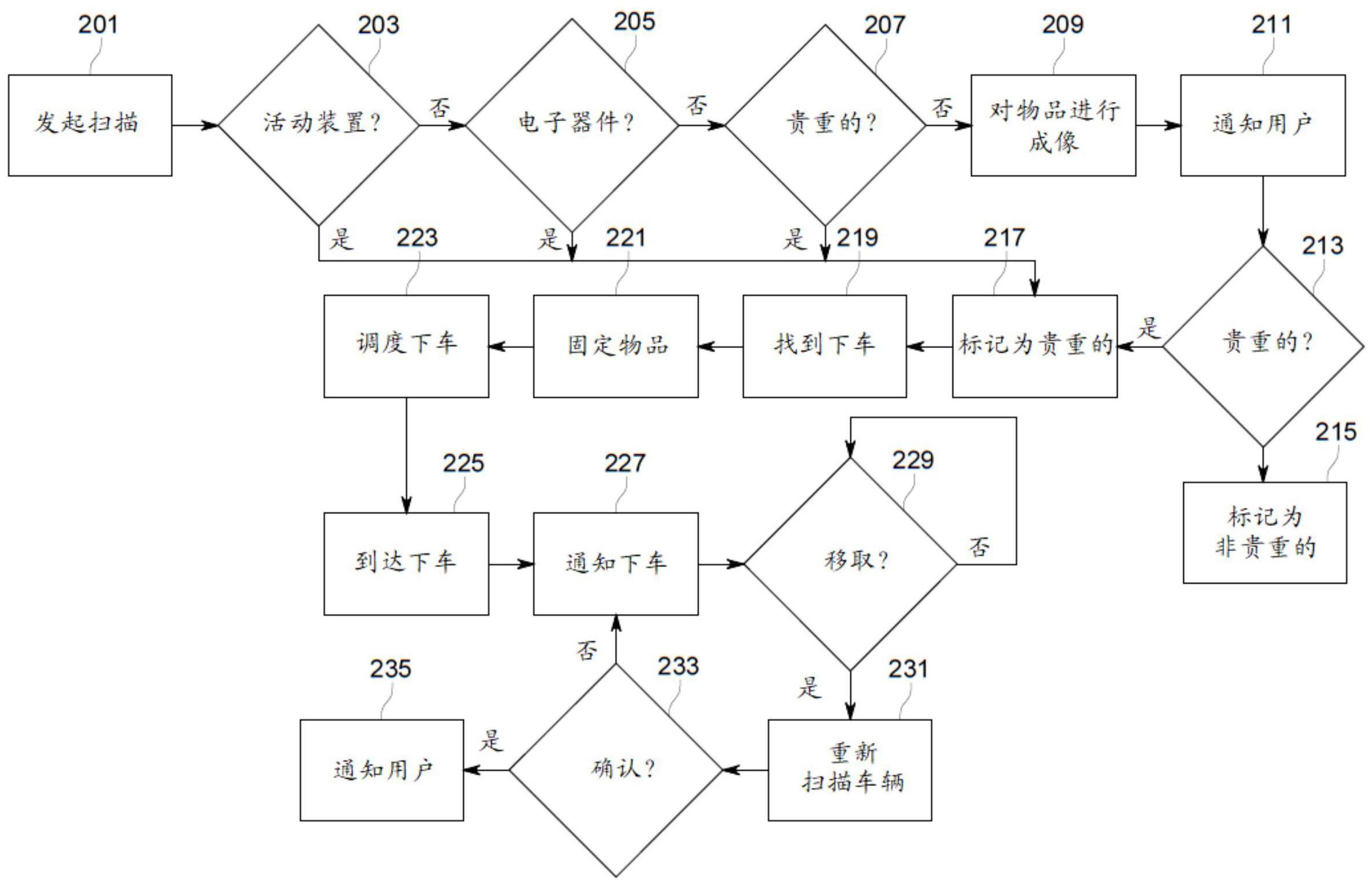
在第一说明性实施例中,一种系统包括处理器,所述处理器被配置为使用车辆传 感器来检测车辆内的物品。所述处理器还被配置为基于确定的物品价值而确定是否应当移 取所述物品。所述处理器还被配置为响应于确定应当移取所述物品而调度在自动化物品移 取中心处移取。另外,所述处理器被配置为:当所述车辆到达所述物品移取中心时无线地向 所述物品移取中心通知车辆到达,包括发送所述物品的标识;从所述物品移取中心接收所 述物品已经被移取的指示;以及通过尝试使用所述车辆传感器检测所述物品来确认所述物 品的移取,所述确认基于未检测到所述物品而进行。 在第二说明性实施例中,一种系统包括:机器人移取装置,所述机器人移取装置被 配备有传感器;以及处理器,所述处理器被配置为从要从中移取物品的车辆接收所述物品 的无线标识。所述处理器还被配置为在车辆内部内引导所述移取装置以使用所述传感器来 基于所述标识而识别所述物品。另外,所述处理器被配置为使用所述移取装置来固定和移 取所述物品。所述处理器还被配置为:将所述物品放置在上锁容器中;创建所述上锁容器的 临时访问参数;以及将所述访问参数无线地传达到与所述物品具有预定义的关联的物品所 有者。 在第三说明性实施例中,一种系统包括处理器,所述处理器被配置为使用机器人 移取装置来固定由车辆无线地识别的物品并从所述车辆的内部移取所述物品。所述处理器 还被配置为基于所述车辆确认所述车辆不再感测到所述物品而经由无线通信向所述车辆 确认所述识别的物品被移取。这种移取还可以包括使用机器人臂、无人机和其他机器人装 置来改变气味(经由调节剂分配)、擦拭表面和干燥潮湿区域或洒落物。 附图说明 图1示出了说明性车辆评估系统; 图2示出了车辆评估过程的说明性示例; 3 CN 111612679 A 说 明 书 2/8 页 图3示出了整改调度过程的说明性示例; 图4示出了物品归还过程的说明性示例;以及 图5示出了说明性车辆队列处理过程。











