
技术摘要:
本申请的实施例提供了一种目标对象的定位方法、装置。该方法包括:获取由第一摄像头采集的包含有目标对象的第一影像;计算所述第一影像中目标对象的第一定位坐标,以及所述第一定位坐标对应的定位置信度,其中,所述定位置信度用于表征所述第一定位坐标的定位精度;在 全部
背景技术:
在目标的定位场景中,比如在对交通道路区域中的目标对象进行定位的场景,通 常是通过普通的摄像头,对路口的目标对象进行拍照来获取目标对象的定位坐标。然而,在 一些情况下,由于受限于摄像头硬件能力和物理视野环境,图片边缘或遮挡位置的目标对 象的定位精度较低。因此,如何能够提高对目标对象进行定位的精准度是亟待解决的技术 问题。
技术实现要素:
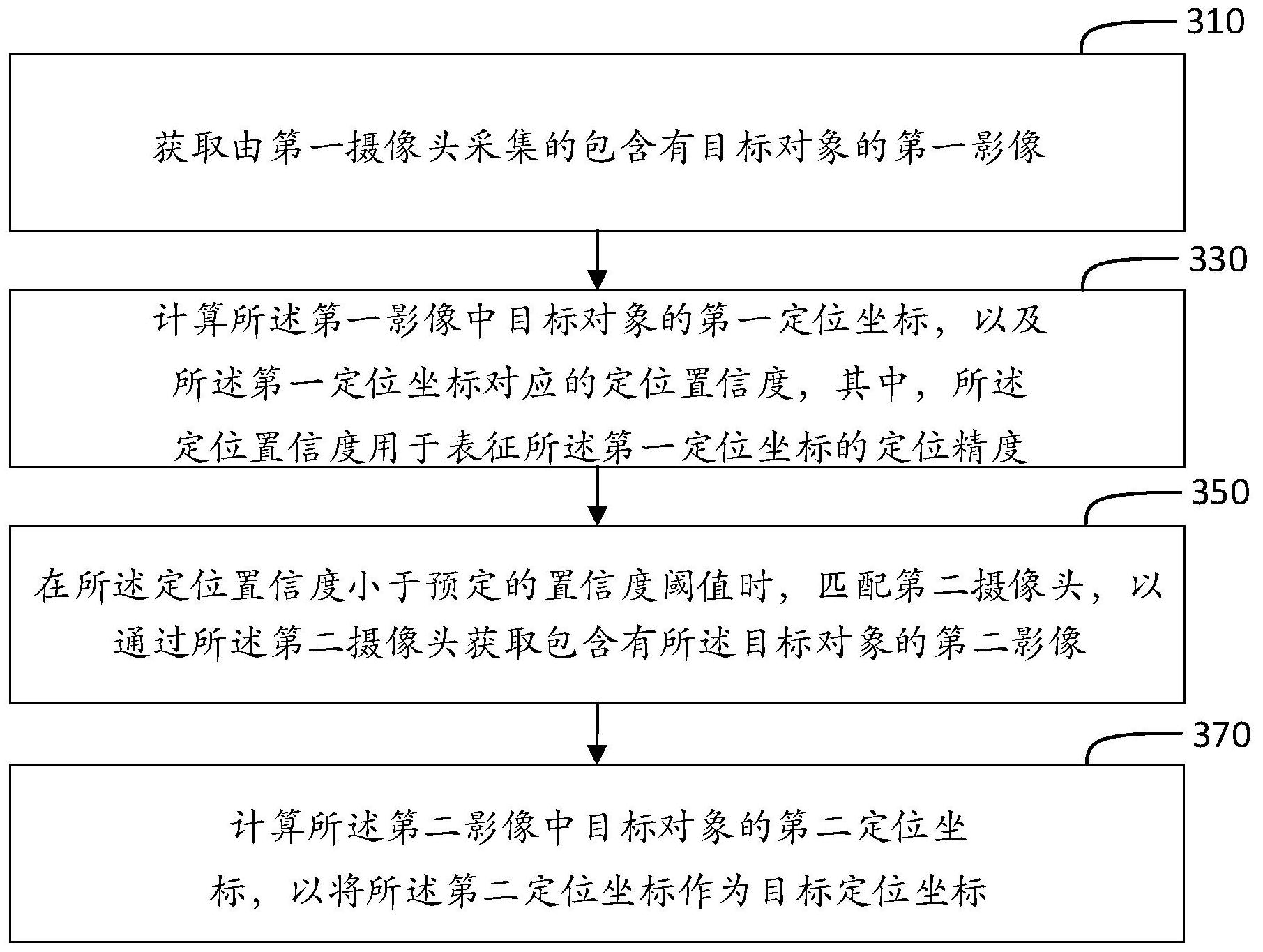
本申请的实施例提供了一种目标对象的定位方法、装置、计算机可读介质及电子 设备,进而至少在一定程度上可以提高对目标对象进行定位的精准度。 本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请 的实践而习得。 根据本申请实施例的一个方面,提供了一种目标对象的定位方法,包括:获取由第 一摄像头采集的包含有目标对象的第一影像;计算所述第一影像中目标对象的第一定位坐 标,以及所述第一定位坐标对应的定位置信度,其中,所述定位置信度用于表征所述第一定 位坐标的定位精度;在所述定位置信度小于预定的置信度阈值时,匹配第二摄像头,以通过 所述第二摄像头获取包含有所述目标对象的第二影像;计算所述第二影像中目标对象的第 二定位坐标,以将所述第二定位坐标作为目标定位坐标。 根据本申请实施例的一个方面,提供了一种目标对象的定位装置,所述装置包括: 获取单元,被用于获取由第一摄像头采集的包含有目标对象的第一影像;第一计算单元,被 用于计算所述第一影像中目标对象的第一定位坐标,以及所述第一定位坐标对应的定位置 信度,其中,所述定位置信度用于表征所述第一定位坐标的定位精度;匹配单元,被用于在 所述定位置信度小于预定的置信度阈值时,匹配第二摄像头,以通过所述第二摄像头获取 包含有所述目标对象的第二影像;第二计算单元,被用于计算所述第二影像中目标对象的 第二定位坐标,以将所述第二定位坐标作为目标定位坐标。 在本申请的一些实施例中,基于前述方案,所述装置还包括:识别单元,被用于识 别所述第一影像中的目标对象,得到所述目标对象的目标对象属性;生成单元,被用于根据 所述目标对象的目标对象属性,为所述目标对象生成属性标签,所述属性标签用于标识所 述目标对象。 在本申请的一些实施例中,基于前述方案,所述第一计算单元配置为:获取与所述 第一影像对应的影像参数;基于所述影像参数,计算所述第一影像中目标对象的第一定位 坐标。 4 CN 111553947 A 说 明 书 2/15 页 在本申请的一些实施例中,基于前述方案,所述第一影像对应的影像参数包括所 述第一摄像头的定位坐标,所述第一计算单元配置为:获取所述目标对象在所述第一影像 中的位置;根据所述目标对象在所述第一影像中的位置,计算所述目标对象与第一摄像头 之间的定位坐标差;根据第一摄像头的定位坐标,以及所述目标对象与第一摄像头之间的 定位坐标差,计算所述第一影像中目标对象的第一定位坐标。 在本申请的一些实施例中,基于前述方案,所述第一计算单元配置为:获取所述目 标对象在所述第一影像中的位置;根据所述目标对象在所述第一影像中的位置,计算与所 述第一定位坐标对应的定位置信度,其中,所述定位置信度与所述目标对象在所述第一影 像中的位置距离影像中心位置的长度成反比。 在本申请的一些实施例中,基于前述方案,所述匹配单元配置为:确定在除第一摄 像头之外的其它摄像头的视野区域所对应的定位坐标区间;基于所述定位坐标区间,在除 第一摄像头之外的其它摄像头中匹配第二摄像头。 在本申请的一些实施例中,基于前述方案,所述匹配单元配置为:检测所述第一定 位坐标是否落入所述定位坐标区间;在所述第一定位坐标落入所述定位坐标区间时,将所 述定位坐标区间对应的摄像头确定为匹配的第二摄像头。 在本申请的一些实施例中,基于前述方案,所述匹配单元配置为:向除第一摄像头 之外的其它摄像头发送即时状态请求消息,所述即时状态请求消息用于请求所述其它摄像 头的即时状态信息;获取所述其它反馈的即时状态信息;基于所述即时状态信息,在除第一 摄像头之外的其它摄像头中匹配第二摄像头。 在本申请的一些实施例中,基于前述方案,所述第二计算单元配置为:在匹配的所 述第二摄像头的数量为至少两个时,获取由至少两个第二摄像头采集的包含有目标对象的 至少两个第二影像;计算所述至少两个第二影像中目标对象的至少两个第三定位坐标;对 所述至少两个第三定位坐标进行数学统计,得到所述第二定位坐标。 根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机 程序,所述计算机程序被处理器执行时实现如上述实施例中所述的目标对象的定位方法。 根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器; 存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执 行时,使得所述一个或多个处理器实现如上述实施例中所述的目标对象的定位方法。 在本申请的一些实施例所提供的技术方案中,,计算由第一摄像头采集的第一影 像中目标对象的第一定位坐标,以及第一定位坐标对应的定位置信度,并在所述定位置信 度小于预定的置信度阈值时,匹配第二摄像头,以获取包含有所述目标对象的第二影像,并 再次计算所述第二影像中目标对象的第二定位坐标,将所述第二定位坐标作为目标定位坐 标。由于定位置信度可以用于表征所述第一定位坐标的定位精度,因此可以通过预定的置 信度阈值,筛选出需要重新采集影像计算定位坐标的目标对象,进一步的,通过匹配第二摄 像头采集目标对象的第二影像,并通过第二影像可以计算出目标对象的第二定位坐标,故 本申请的一些实施例所提供的技术方案可以提高对目标对象进行定位的精准度。 应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不 能限制本申请。 5 CN 111553947 A 说 明 书 3/15 页 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 例,并与说明书一起用于解释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请 的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据 这些附图获得其他的附图。在附图中: 图1示出了可以应用本申请实施例的技术方案的示例性系统架构的示意图; 图2示出了根据本申请的一个实施例的实施目标对象的定位方法的应用场景图; 图3示出了根据本申请的一个实施例的目标对象的定位方法的流程图; 图4示出了根据本申请的一个实施例的在计算所述第一影像中目标对象的第一定 位坐标,以及所述第一定位坐标对应的定位置信度之前的流程图; 图5示出了根据本申请的一个实施例的计算所述第一影像中目标对象的第一定位 坐标的细节流程图; 图6示出了根据本申请的一个实施例的基于相似三角形的单目视觉定位测距原理 图 图7示出了根据本申请的一个实施例的目标对象在由摄像头采集的第一影像中的 展示图; 图8示出了根据本申请的一个实施例的匹配第二摄像头的流程图; 图9示出了根据本申请的一个实施例的匹配第二摄像头的细节流程图; 图10示出了根据本申请的一个实施例的匹配第二摄像头的流程图; 图11示出了根据本申请的一个实施例的计算所述第二影像中目标对象的第二定 位坐标的流程图; 图12示出了根据本申请的一个实施例的基于MEC对路口区域中目标对象进行定位 的整体流程图; 图13示出了根据本申请的一个实施例的基于MEC对路口区域中目标对象进行定位 的整体流程图; 图14示出了根据本申请的一个实施例的目标对象的定位装置的框图; 图15示出了适于用来实现本申请实施例的电子设备的计算机系统的结构示意图。











