
技术摘要:
本申请涉及一种点云单木分割方法、装置、设备及计算机可读介质。该方法包括:对待处理点云进行水平聚类,得到多个水平聚簇,其中,待处理点云为扫描设备对目标树木进行扫描获得的点云数据;从多个水平聚簇中提取目标树木的树干种子点;根据树干种子点在待处理点云中构 全部
背景技术:
逆向工程中,通过测量仪器得到物体外观表面的点数据集合的方式已经广泛应用 于农业、林业、地灾、电力、测绘等各个领域的点位信息的探测。特别是利用地面激光雷达和 移动激光雷达(LiDAR)等扫描设备对树木进行扫描获得的点云数据可以直接获得树高、胸 径、树冠直径、树冠面积和树冠体积,而且,利用基于单个树结构的经验公式可以估算生物 量和碳储量。 目前,相关技术中对点云数据进行单木分割时仍有许多缺陷。发明人在研究过程 中发现,目前存在的地基激光雷达单木分割方法存在分割精度低、效率不高等问题,主要是 树木识别准确性不高,按照简单的切片聚类容易将非树木识别为树木进而作为种子点生长 枝叶,对树干识别后进行枝叶点云生长时,易受周边树木枝叶的影响,导致过分割和漏分割 严重,影响单木参数提取精度以及展示效果。相关技术中也有采用简单的最短路径算法进 行生长,然而发明人在研究过程中发现,简单的最短路径生长也存在效率低下等问题,不能 满足生产等需求,无法处理数量较密集的激光点云。 针对上述的问题,目前尚未提出有效的解决方案。
技术实现要素:
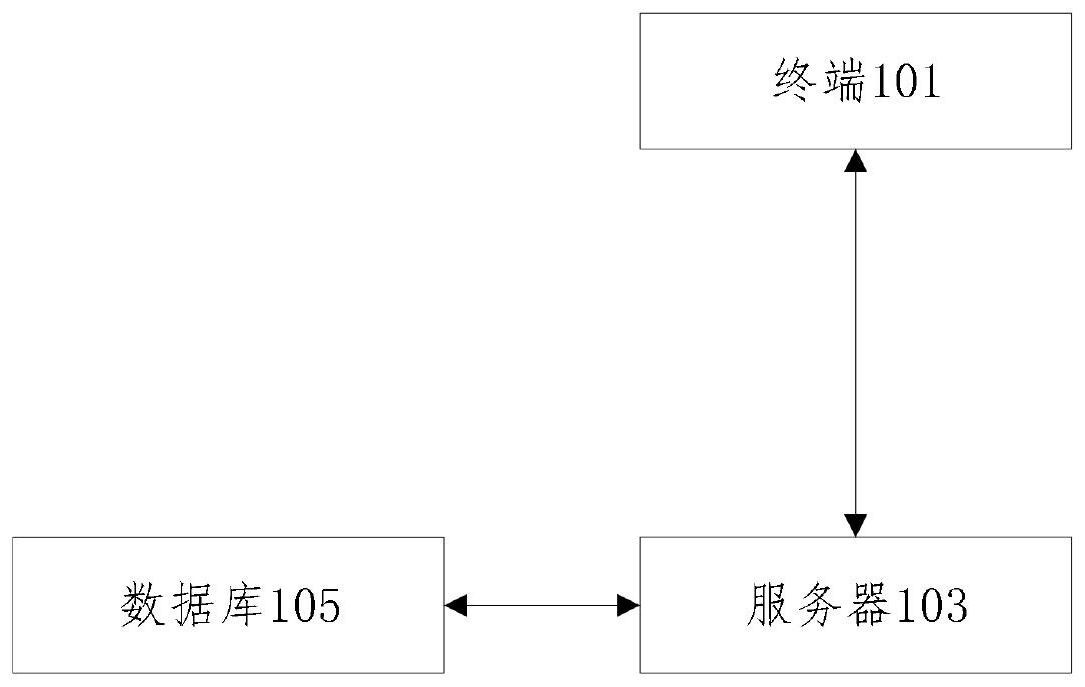
本申请提供了一种点云单木分割方法、装置、设备及计算机可读介质,以解决上述 “分割精度低、效率不高”的技术问题。 第一方面,本申请提供了一种点云单木分割方法,包括:对待处理点云进行水平聚 类,得到多个水平聚簇,其中,待处理点云为扫描设备对目标树木进行扫描获得的点云数 据;从多个水平聚簇中提取目标树木的树干种子点;根据树干种子点在待处理点云中构建 路径图;在路径图中遍历查询距离树干种子点的最短路径点;在当前最短路径点至与之相 邻的参考最短路径点的距离小于等于距离阈值的情况下,将当前最短路径点合并到树干种 子点所在的单木点集,其中,单木点集表示属于树干种子点对应的单木上的点的集合。 可选地,对待处理点云进行水平聚类,得到多个水平聚簇之前,还包括按照如下方 式对待处理点云进行预处理:对待处理点云去噪,得到降噪点云;对降噪点云进行分类,得 到地面点和树木点;将地面点距离树木点的相对高度作为树木点的冠层高度。 可选地,对待处理点云进行水平聚类,得到多个水平聚簇包括:按照预设高度阈值 对冠层高度的所述树木点进行水平切层,得到多个水平层的树木点;对各个水平层的树木 点进行水平欧式聚类,得到多个水平聚簇。 可选地,从多个水平聚簇中提取目标树木的树干种子点包括:计算各个水平聚簇 的重心点,并为各个重心点增加非树干种子点标识;将距离地面点最近的一层水平层中的 4 CN 111598915 A 说 明 书 2/10 页 重心点作为第一备选树干种子点,并为第一备选树干种子点增加树干种子点标识;计算目 标水平层中N个重心点与第一备选树干种子点的第一方向,其中,目标水平层为除第一备选 树干种子点所在的水平层之外的其他各个水平层;计算目标水平层N个重心点中任意两个 重心点之间的第二方向;在第一方向与地面间的夹角大于角度阈值的情况下,将第一方向 与第二方向形成的夹角最小的一组重心点作为第二备选树干种子点,并为第二备选树干种 子点增加树干种子点标识;在第二备选树干种子点符合预设条件的情况下,将第二备选树 干种子点作为最终的树干种子点。 可选地,在路径图中遍历查询距离树干种子点的最短路径点之前,还包括按照如 下方式创建重心点集:对树木点进行三维空间的欧式聚类,得到多个空间聚簇;从多个空间 聚簇中选出多个目标聚簇,其中,目标聚簇为聚类点数大于筛选阈值的空间聚簇;计算由多 个目标聚簇的重心点组成的重心点集,其中,重心点集中的多个重心点按照其所在的目标 聚簇中聚类点数的数量由大到小进行排序。 可选地,在路径图中查询到的当前最短路径点至与之相邻的参考最短路径点的距 离大于距离阈值的情况下,还包括按照如下方式重新查询最短路径点:在重心点集中查询 距离树干种子点最近的最近重心点;在最近重心点对应的目标聚簇中查询距离树干种子点 最近的最短路径点,并将最短路径点合并到树干种子点所在的单木点集。 可选地,将当前最短路径点合并到树干种子点所在的单木点集之后,该方法还包 括:将待处理点云进行体素化降采样,得到体素重心点;根据单木点集表征的单木分割关系 对体素重心点构建k-dtree,以按照最近邻方式对待处理点云还原单木标记。 第二方面,本申请提供了一种点云单木分割装置,包括:聚类模块,用于对待处理 点云进行水平聚类,得到多个水平聚簇,其中,待处理点云为扫描设备对目标树木进行扫描 获得的点云数据;提取模块,用于从多个水平聚簇中提取目标树木的树干种子点;构建模 块,用于根据树干种子点在待处理点云中构建路径图;查询模块,用于在路径图中遍历查询 距离树干种子点的最短路径点;分配模块,用于在当前最短路径点至与之相邻的参考最短 路径点的距离小于等于距离阈值的情况下,将当前最短路径点合并到树干种子点所在的单 木点集,其中,单木点集表示属于树干种子点对应的单木上的点的集合。 第三方面,本申请提供了一种计算机设备,包括存储器、处理器,存储器中存储有 可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述第一方面任一项方法 的步骤。 第四方面,本申请还提供了一种计算机可读介质,程序代码使处理器执行上述第 一方面任一方法。 本申请实施例提供的上述技术方案与相关技术相比具有如下优点: 本申请通过对待处理点云进行水平聚类,得到多个水平聚簇,其中,待处理点云为 扫描设备对目标树木进行扫描获得的点云数据;从多个水平聚簇中提取目标树木的树干种 子点;根据树干种子点在待处理点云中构建路径图;在路径图中遍历查询距离树干种子点 的最短路径点;在当前最短路径点至与之相邻的参考最短路径点的距离小于等于距离阈值 的情况下,将当前最短路径点合并到树干种子点所在的单木点集,其中,单木点集表示属于 树干种子点对应的单木上的点的集合的点云单木分割方法,有效降低了多棵树木间枝干交 叉对单木分割的影响,提升了分割精度,加快了分割效率。 5 CN 111598915 A 说 明 书 3/10 页 附图说明 此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施 例,并与说明书一起用于解释本申请的原理。 为了更清楚地说明本申请实施例或相关技术中的技术方案,下面将对实施例或相 关技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而 言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。 图1为根据本申请实施例提供的一种可选的点云单木分割方法硬件环境示意图; 图2为根据本申请实施例提供的一种可选的点云单木分割方法流程图; 图3为根据本申请实施例提供的一种可选的点云数据预处理流程图; 图4为根据本申请实施例提供的一种可选的树干种子点提取流程图; 图5为根据本申请实施例提供的一种可选的点云单木分割装置框图。











