
技术摘要:
本发明涉及一种自主行进体装置。其提供电动吸尘器能够基于适当的地图数据进行自主行进的电动吸尘装置。电动吸尘装置(13)具有电动吸尘器(11)以及充电装置(12)。充电装置(12)具备电源部(77)以及电源检测部。电源部(77)与外部电源连接。电源检测部对电源部(77)与外部电源 全部
背景技术:
以往,作为这种自主行进体,已知有在作为被吸尘面的地面上在自主行进的同时 对地面进行吸尘的所谓的自主行进型的电动吸尘器(吸尘机器人)。在一般情况下,该电动 吸尘器与用于对作为电源的二次电池进行充电的充电装置一起构成作为自主行进体装置 的电动吸尘装置。 在这样的电动吸尘器中,在吸尘处理的开始时或者吸尘处理的过程中,对吸尘区 域的形状、障碍物等的地图信息进行积累,并对自身位置、此后应行进的场所进行推断,由 此能够进行偏差较少的高效的吸尘。 通常,电动吸尘器在单个吸尘区域、或者相同住宅中的多个吸尘区域中反复使用 的情况较多,因此不需要每当开始吸尘处理时就对地图数据进行更新,但是例如在将电动 吸尘装置搬运到其他房间中的情况下等,也存在需要不同的地图数据的情况。由此,要求采 用根据所需而适当的地图数据。 专利文献1:日本专利第5426603号公报
技术实现要素:
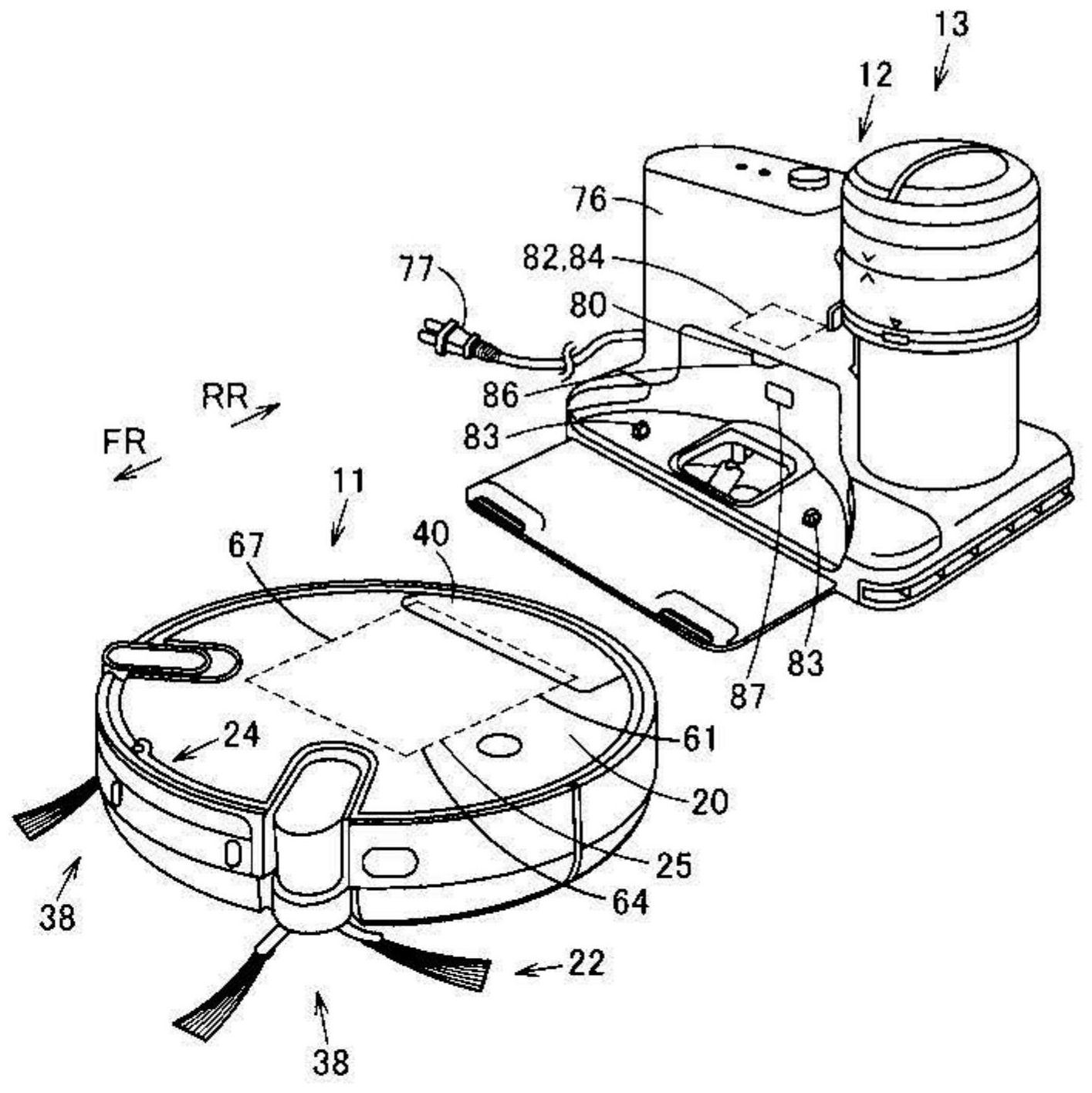
本发明要解决的课题在于提供一种自主行进体装置,自主行进体能够基于适当的 地图数据进行自主行进。 用于解决课题的手段 实施方式的自主行进体装置具有自主行进体以及基地装置。自主行进体具备地图 保持存储器以及行进控制单元。地图保持存储器保持地图数据。行进控制单元基于地图保 持存储器所保持的地图数据对自主行进进行控制。基地装置具备连接部以及检测单元。连 接部与外部电源连接。检测单元对连接部与外部电源是否连接进行检测。然后,行进控制单 元为,在自主行进体从基地装置开始自主行进时,在成为通过检测单元检测到连接部与外 部电源之间的连接被切断的非稳定状态之后,对自主行进用的地图数据进行变更。 此外,实施方式的自主行进体装置具有自主行进体以及基地装置。自主行进体具 备地图保持存储器以及行进控制单元。地图保持存储器保持地图数据。行进控制单元基于 地图保持存储器所保持的地图数据对自主行进进行控制。基地装置具备连接部以及抬起传 感器。连接部与外部电源连接。抬起传感器对抬起进行检测。然后,行进控制单元为,在自主 行进体从基地装置开始自主行进时,在成为通过抬起传感器检测到基地装置的抬起的非稳 定状态之后,对自主行进用的地图数据进行变更。 并且,实施方式的自主行进体装置具有自主行进体以及基地装置。自主行进体具 备地图保持存储器以及行进控制单元。地图保持存储器保持地图数据。行进控制单元基于 4 CN 111603098 A 说 明 书 2/15 页 地图保持存储器所保持的地图数据对自主行进进行控制。基地装置具备连接部。连接部与 外部电源连接。然后,行进控制单元为,在自主行进体从与基地装置不同的位置开始自主行 进时,对自主行进用的地图数据进行变更。 附图说明 图1是表示第一实施方式的自主行进体装置的立体图。 图2是表示同上的自主行进体装置的自主行进体向基地装置的回归状态的立体 图。 图3是从下方表示同上的自主行进体装置的自主行进体的俯视图。 图4是表示同上的自主行进体的内部构造的框图。 图5是表示同上的自主行进体装置的基地装置的内部构造的框图。 图6是示意地表示同上的自主行进体的传感器对物体的三维坐标的计算方法的说 明图。 图7是表示同上的自主行进体的自主行进从开始到结束为止的自主行进体装置的 控制的流程图。 图8是表示第二实施方式的自主行进体装置的自主行进体的内部构造的框图。 图9是表示同上的自主行进体装置的基地装置的内部构造的框图。 图10是表示同上自主行进体装置的自主行进体的自主行进从开始到结束为止的 自主行进体的控制的流程图。 符号的说明 11 作为自主行进体的电动吸尘器 12 作为基地装置的充电装置 13 作为自主行进体装置的电动吸尘装置 41 作为传感器的周围检测传感器 56 作为接收单元的接收部 61 作为行进控制单元的行进控制部 64 作为绘制单元的地图生成部 67 作为地图保持存储器的存储器 77 作为连接部的电源部 78 作为检测单元的电源检测部 79 抬起传感器 81 作为传达单元的碰撞防止信号输出部 86 作为传达单元的装置发送部











