
技术摘要:
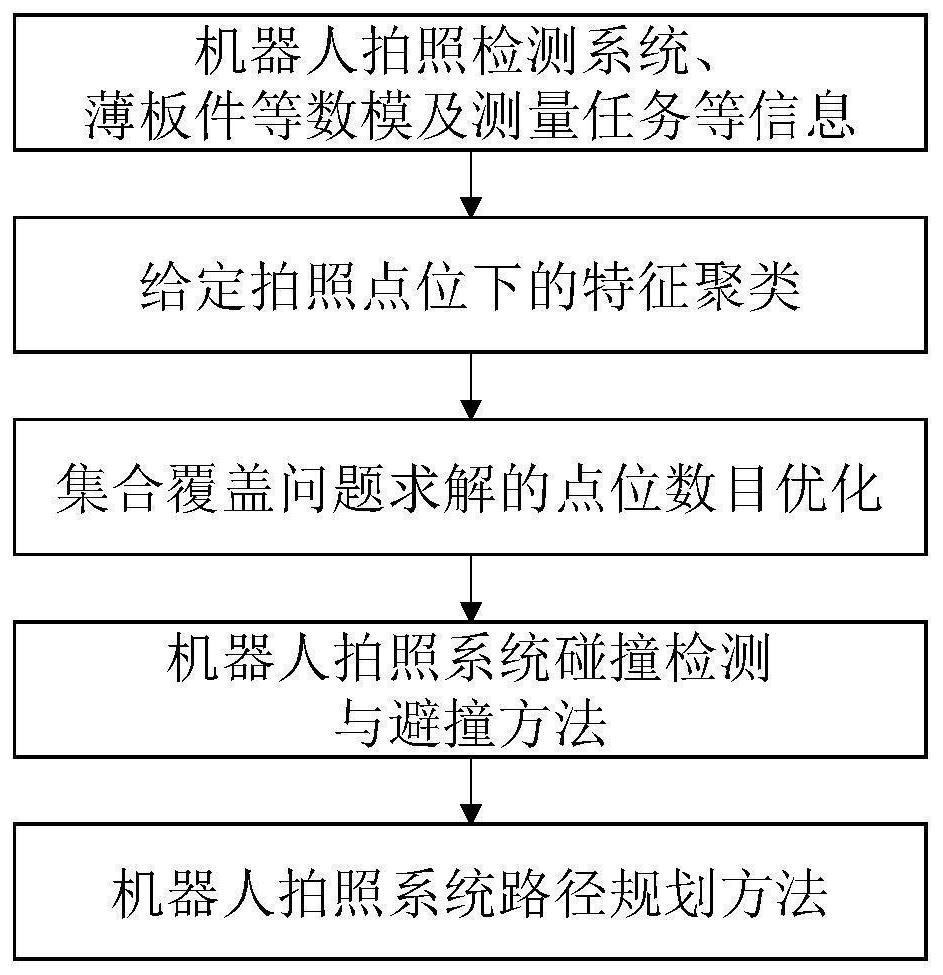
本发明提出了一种面向薄板件的机器人拍照测量系统自动规划方法,该方法首先结合光学测量系统信息与测量要求,分析了给定测头拍照点位下待测特征聚类方法,提取不同点位下测点集合;通过对测量特征的集合覆盖求解,获得全特征覆盖的最少拍照点位数;基于机器人‑待测物 全部
背景技术:
车身尺寸精度是影响着汽车整车质量的重要因素之一,车身尺寸质量评价、监控 与诊断均离不开测量数据,而不同的测量方式影响着测量数据的精确性和有效性。长期以 来,三坐标测量机作为传统接触式设备被广泛应用于车身制造过程,然而随着技术的进步, 光学测量凭借非接触、采集数据量大、安全性高等优点正逐步取代接触式测量,其中拍照式 测量具有高密度点云测下精度高、能耗低等特点,正逐渐应用于汽车薄板件的尺寸与几何 精度检测,为车身结构的偏差可视化、质量分析与虚拟匹配提供基础。然而,现有拍照式拍 照测量系统的拍照点位确定、机器人路径规划均高度依赖经验,且检测规划效率低,导致车 身几何、尺寸特征的检测效率低,难以提供对产品质量的快速评估。 机器视觉的次序规划问题是要寻找一组满足覆盖要求的拍照点位,而且测量路径 要满足可达、无碰撞以及路径最短、机械功最小等要求。Gonzalez-Banos提出了一种覆盖采 样的随机Art-gallery算法,该算法通过对待检测表面的工作空间进行随机采样来生成可 接受的拍照点位集。E.Glorieux等在随机抽样的基础上,提出目标拍照点位采样的策略,通 过将测量特征数目最大化与拍照移动点位最小化等冲突目标的综合,采用迭代优化方法保 证所有特征被测量,同时减少了随机抽样的次数。Vasquez-Gomez等提出了使用次优视图 (NBV)框架来规划拍照点位,NBV方法基于拍照点位的信息增益以及其他优化目标和约束, 根据感知过程中获取的信息,迭代地选择新的拍照点位。以上研究针对不同对象下的视点 次序规划做了相应研究。
技术实现要素:
本发明的目的在于提供一种面向薄板件的机器人拍照测量系统自动规划方法,实 现在保证所有测量特征能被高效测量基础上,获得拍照点位数量最少,同时生成无碰撞测 量路径,实现薄板件拍照式光学检测的自动高效规划,并提高待测部件的检测效率。 为实现上述目的,本发明所采用的技术方案为:一种面向车身薄板件的机器人拍 照测量系统检测次序优化方法,包括如下步骤: S101、提取机器人、拍照式光学测头、待测薄板件以及夹具等数模与测量任务与要 求;提取待测薄板件测点信息,包括特征类型、空间坐标值、矢量方向及尺寸轮廓等; S102、根据拍照式光学测头设备参数确定视野范围的大小,构建给定拍照点位下 测点的检测质量及其影响因素(测点、测头矢量方向、测头中心光束的夹角等)的关系模型; S103、记所有测点组成的测点全集为S={M1,M2,...,Mi,...,Mn},(i=1,2,…,n), 根据上一步骤将第i个测点置于测头的视野中心时所能测量出来的所有测点集合,记为测 点集Si; 3 CN 111609847 A 说 明 书 2/5 页 S104、计算将每一个测点Mi(i=1,2,…,n)置于视野中心时所能得到的测点集分 别为S1,S2,S3,...,Sn; S105、通过集合覆盖求解,优化选取测点集S1,S2,S3,...,Sn的某种组合,使其能够 覆盖所有的测点,且该种组合的数目最小; S106、因为测量时将测点置于视野中心,由矢量方向以及视野中心到拍照测头的 距离可以计算出拍照点位的位置; S107、对任意两拍照点位之间的机器人运动路径进行碰撞检测,通过添加避撞点 的方式生成无碰撞路径; S108、针对无碰撞、可达的拍照点位组,同时考虑光学测头路径中的空间运动轨 迹,计算可达点位间的机器人运动时间,并将不可达路径进行标记,以获得所有拍照点位间 的检测时间矩阵; S109、基于组合优化求解算法实现测量机器人的检测路径的全局规划实现全特征 覆盖、且测量时间最短的机器人运动结果。 与现有技术相比,本发明的优点为:本发明包括拍照式测量中确定点位下测量特 征的聚类、拍照点位优选方式、机器人点位点局部测量时间矩阵计算、全局路径规划等,结 合待测车身薄板件的测点信息,通过算法程序与应用步骤的设计开发,实现车身薄板件无 碰撞、高效的检测规划。本发明提取待测薄板件测量特征的空间坐标、矢量方向等信息;分 析了给定拍照拍照点位下待测特征聚类方法,提取不同点位下测点集合;结合贪婪算法的 集合覆盖求解,获得全特征覆盖的最少点位数;基于机器人-车身碰撞检测与避撞策略,给 出了面向检测时间最短的机器人检测次序规划流程。提高了拍照式拍照测量系统自动化程 度与测量效率。 附图说明 图1为薄板件的机器人拍照测量系统规划流程图。 图2为优化后拍照点位集对应的测头空间位置。 图3为顶盖测量的机器人优化检测次序。











